Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Дистанционный магнитный компас с датчиком углового перемещения
В настоящее время находят применение магнитные компасы с оптической, например, КМО – Т и КМ – 145 -5; с электрической (“Сектор”) и с комбинированной системами дистанционной передачи информации от картушки на репитеры (КМ – 145 – 7).
Оптическая система передачи информации может быть выполнена с использованием линз и зеркал (компас КМО – Т) либо световода (КМ – 145 -5). Её недостаток — невозможность установки репитеров в произвольных, удобных для судоводителей точках судна, например, в каюте капитана.
Электрическая система передачи информации тоже не лишена недостатков, к числу которых относятся шум, производимый сельсинами, и невозможность непосредственного получения истинного значения курса.
Общим недостатком подобных систем является то, что определение остаточной девиации приходится производить вручную путём известных вычислений таблицы остаточной девиации.
Вычисление истинного значения курса судна осуществляется также ручным способом — путём сложения значений компасного курса, поправки на остаточную девиацию и магнитного склонения, что вызывает дополнительные затраты времени и повышает вероятность субъективных ошибок.
Нами предложен и запатентован совместно с дипломниками НГМА дистанционный магнитный компас с аналого-цифровым преобразованием показаний и программным учётом магнитной девиации и магнитного склонения.
На рис. 1.5 представлена функциональная схема устройства.
Дистанционный магнитный компас содержит первичный емкостный преобразователь углового перемещения 1 — конденсатор переменной ёмкости, ротор которого жёстко связан с картушкой компаса; вторичный частотный преобразователь 2 — управляемый этой ёмкостью кварцевый генератор; опорный кварцевый генератор 3; смеситель 4; формирователь однополярных импульсов 5; вычислительный блок 6; программатор 7; интерфейс ввода-вывода информации 8; цифровой индикатор 9 и буферный регистр 10.
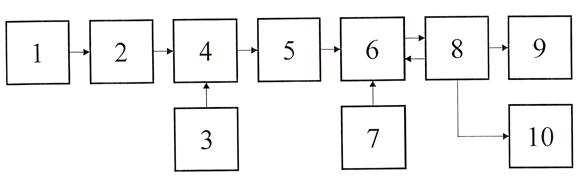
Рис.1.5
Конденсатор 1 включён в схему кварцевого генератора 2, частота которого изменяется с изменением ёмкости. Таким образом, угловое перемещение картушки компаса преобразуется сначала в изменение ёмкости, а затем в отклонение частоты колебаний.
Колебания разностной частоты, получаемой в смесителе 4 путём смешения частот управляемого 2 и опорного 3 кварцевых генераторов, преобразуются формирователем импульсов 5 в последовательность однополярных импульсов, период следования которых содержит информацию о компасном курсе судна. Эта информация обрабатывается в вычислительном блоке 6, причём значения магнитной девиации, определяемые на девиационном полигоне на восьми главных и четвертных компасных курсах, вводятся в программатор штурманом через клавиатуру ввода-вывода информации 8. Аналогичным образом вводятся значения магнитного склонения (процесс ввода значений магнитного склонения можно автоматизировать, поскольку оно зависит от географического местоположения судна).
Вычисленное значение истинного курса отображается на цифровом индикаторе 9 и через буферный регистр 10 выдаётся на вход системы автоматической прокладки курса, авторулевого, в цифровые репитеры и др.
Из блоков функциональной схемы рис.1.5 наиболее специфичен первичный ёмкостный преобразователь углового перемещения картушки компаса.
В принципе можно было бы применить индуктивный датчик угла поворота. Но индуктивные преобразователи не лишены недостатков, к числу которых относятся низкий коэффициент передачи, инерционность и, самое главное, погрешность измерения, обусловленная преобразованием неэлектрической величины в амплитуду напряжения.
Ёмкостные преобразователи углового перемещения более перспективны. Их достоинства — высокая чувствительность, малая инерционность, малое усилие электрического взаимодействия между обкладками конденсатора, возможность получения практически любой функциональной зависимости ёмкости от измеряемого угла поворота, простота и технологичность конструкции, малые габариты и масса.
Главное же достоинство ёмкостных первичных преобразователей — простота преобразования измеряемой входной неэлектрической величины в частоту колебаний вторичного преобразователя (автогенератора гармонических или импульсных электрических колебаний). Частотный метод преобразования неэлектрических величин в электрические обеспечивает б`ольшую точность, чем амплитудный.
На рис. 1.6, а и б схематически изображён упрощённый вариант конструкции разработанного нами преобразователя углового перемещения картушки магнитного компаса в значение ёмкости. Здесь 1 — диэлектрическая пластина соответствующей конфигурации (ротор дифференциального конденсатора переменной ёмкости); 2 — стержни, жёстко крепящие пластину 1 к нижней части картушки компаса 3; 4 — шпилька, на которую опирается топка картушки компаса; 5 — котелок компаса; 6 — диэлектрический кронштейн для крепления металлизированных статорных обкладок дифференциального конденсатора переменной ёмкости 7, оси которых расположены в диаметральной плоскости судна; 8 — выходные контакты первичного преобразователя.
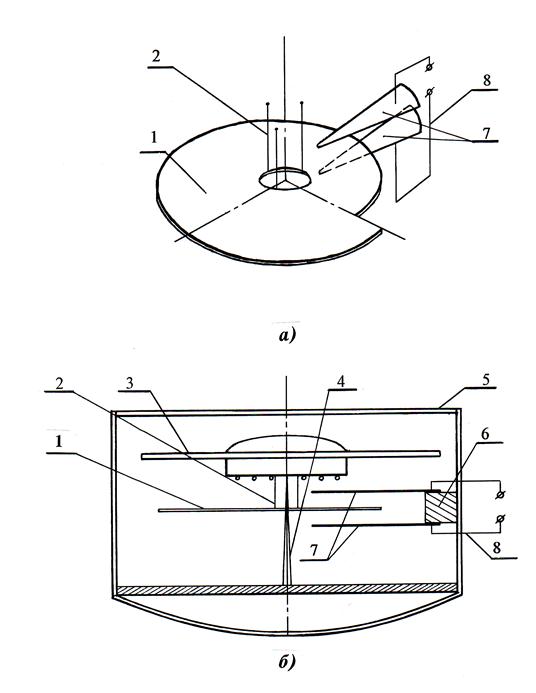
Рис.1.6
Недостатком описанной упрощённой конструкции ёмкостного преобразователя является погрешность измерения на курсе, совпадающем со “ступенькой” ротора. При прохождении “ступеньки” отсчёт углового перемещения совершает скачок на 1800.
Этого недостатка можно избежать, разделив диапазон измерений на два поддиапазона — от 0 до 1800 и от 180 до 3600 — с помощью первичного преобразователя, в котором вместо одной пары статорных пластин — две, со сдвигом на 1800. При этом ротор преобразователя должен быть прикреплён к картушке компаса так, чтобы “ступенька” была ориентирована в направлении “юг” (или “север”), а оси статорных пластин совпадали с диаметральной плоскостью судна.
Остановимся подробнее на том, как в описываемом дистанционном магнитном компасе определять и учитывать остаточную девиацию.
Общепринятый порядок работы по составлению таблицы остаточной девиации включает:
· Определение на девиационном полигоне остаточно девиации компаса на восьми главных и четвертных компасных курсах;
· Вычисление по известной схеме приближённых коэффициентов А, В, С, D и E;
· Вычисление по полученным значениям приближенных коэффициентов таблицы девиации для 24 или 36 равноотстоящих компасных курсов, пользуясь известными схемами;
· Заполнение по результатам вычислений бланка таблицы девиации.
При этом в основу общепринятых вычислений положена приближенная формула расчёта девиации
д = A+ B sin к’ + C cos к’ + D sin2 к’ + E cos 2 к’ , (1.6)
где к’— компасный курс.
Эта формула получена в результате упрощения выражения (1.3):
sin д = A’ cos д + B’ sin к’ + C’ cos к’ + D’ sin(2 к’ + д) + E’ cos (2 к’ + д).
Это выражение определяет зависимость между величиной синуса девиации, точными коэффициентами девиации A’, B’, C’, D’ и E’ и компасными курсами. Оно справедливо для любых значений девиации.
Формула (1.3) для вычисления коэффициентов по девиациям, наблюдённым на равноотстоящих курсах, на практике не применяется из-за громоздкости расчетов. В нашем же случае, когда процесс вычислений автоматизирован, это не важно, и формула (1.3), позволяющая точнее вычислить девиацию, предпочтительнее.
Таким образом, определение и учёт остаточной девиации существенно упрощается: нужно лишь ввести в программатор значения девиации на восьми главных и четвертных компасных курсах. Вычисления точных коэффициентов девиации и значений остаточной девиации для любого конкретного курса. А также определение истинного курса осуществляется в вычислительном блоке автоматически.
При необходимости таблица (или график) девиации для любого числа равноотстоящих курсов может быть распечатана.
(Кстати, составить компьютерную программу для вычисления точных коэффициентов девиации и значений остаточной девиации для любого конкретного курса магнитного компаса по формуле (1.3) — задача посильная любому выпускнику нашей академии).
Благодаря частотному методу преобразования и цифровой обработке информации показания описанного дистанционного магнитного компаса могут передаваться по проводам или по радио на практически любое число репитеров, непрерывно вводиться в память компьютера, использоваться при автоматической прокладке курса.
При этом программным способом учитывается остаточная девиация и магнитное склонение. В отличие от существующих дистанционных компасов с сельсинной передачей показаний на репитеры это устройство бесшумно.
Точность магнитного компаса повышается за счёт минимизации инструментальной и случайной погрешностей измерения.
| <== предыдущая страница | | | следующая страница ==> |
| Системы дистанционной передачи информации | | | Индукционные магнитные компасы и особенности учета в них девиации |
Дата добавления: 2014-08-04; просмотров: 703; Нарушение авторских прав

Мы поможем в написании ваших работ!