Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика
Мы поможем в написании ваших работ!
Система автоматического управления
V. По степени производственной взаимозависимости операций производственного процесса различают поточные линии с жестко связанными и гибко связанными операциями.
IV. В зависимости от роли транспортных устройств в производственном процессе поточные линии бывают двух видов — рабочие и распределительные.
Рабочие конвейеры или транспортеры характеризуются тем, что технологические операции выполняются на самом конвейере, где имеются необходимые для выполнения операции специальные приспособления. Рабочие конвейеры широко применяются при сборке автомашин, моторов, крупных узлов и агрегатов.
Распределительные конвейеры или транспортеры применяются на поточных линиях, где технологические операции выполняются на стационарных рабочих местах (например, станках) и обеспечивают перемещение обрабатываемых деталей между рабочими местами, расположенными около конвейера.
Объект управления и управляющее устройство (контроллер) во взаимодействии друг с другом образуют систему автоматического управления. Техническое устройство, выполняющее функции управления, называют автоматическим управляющим устройством (УУ) или контроллером. Любая система управления строится на основе трех функциональных блоков рис. 1.1.1.
Рис. 1.1.1. 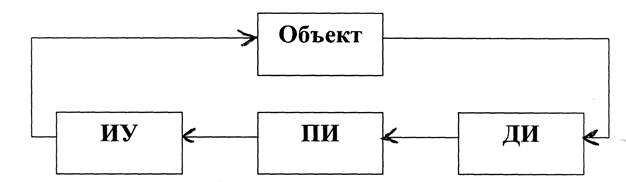
Первый блок состоит из устройств, позволяющих получить информацию о текущих значениях управляемых процессов (или других процессов в объекте, связанных с управляемыми). Этот блок называют измерительным или блоком датчиков информации (ДИ) - блок чувствительных элементов, в ходе функционирования этого блока выдаются информационные сигналы. Эти сигналы поступают во второй блок, блок преобразования и хранения информации (ПИ), где на их основе, а также на основе заранее заложенных сведений (априорной информации) вырабатываются сигналы управления. Правило (алгоритм) преобразования информационных сигналов в сигналы управления называется законом управления.
Сигнал управления показывает, каким должно быть управляющее воздействие в текущий момент времени. Чтобы выработать управляющее воздействие, превратить сигнал в механическое усилие или поток тепла, или поток вещества, требуется еще один блок - исполнительное устройство (ИУ).
Совокупность перечисленных блоков образует замкнутый контур, охватывающий объект управления. Систему, где присутствуют все эти блоки, называют замкнутой системой, или системой с обратной связью от управляемых процессов к управляющим воздействиям.
Используются и более простые разомкнутые системы, где отсутствуют датчики информации, а функции преобразователя информации сводятся лишь к хранению и выдаче выработанной программы управления с требуемыми в каждый момент времени значениями сигнала управления.
Таким образом, в системе управления можно выделить информационную часть, осуществляющую получение, хранение, обработку и выдачу информации, и энергетическую (силовую) часть, служащую для преобразования информации (сигнала управления) в управляющее воздействие на объект.
Обобщенная структурная схема САУ имеет вид, представленный на
рис. 1.1.2.
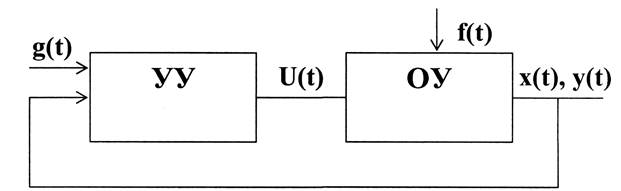
Рис. 1.1.2.
Устройство, в котором протекает процесс, подлежащий регулированию (управлению), называется регулируемым объектом (объектом управления). Объект управления может быть представлен как управляемым техническим устройством, так и более простой системой управления.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта. Одни из этих величин измеряются в процессе работы и называются контролируемыми. Другие, влияющие на режим работы объекта, не измеряются и называются неконтролируемыми.
Контролируемые величины, характеризующие состояние объекта, по которым ведется управление, называются управляемыми или регулируемыми. Регулируемые величины в той или иной степени характеризуют качественные показатели процесса в управляемом объекте.
Автоматически действующее устройство, предназначенное для выполнения задачи регулирования, называется автоматическим регулятором. Часть регулируемого объекта, на которую воздействует регулятор, называется регулирующим устройством, состоящим из исполнительного механизма и регулирующего органа.
Автоматический регулятор вместе с регулируемым объектом называется системой автоматического регулирования.
Изменения регулируемых величин вызываются часто возмущающими воздействиями, приложенными к системе автоматического регулирования.
Возмущающим называется всякое воздействие, которое стремится нарушить функциональную связь между управляющим воздействием и регулируемой переменной.
Воздействие, приложенное к элементу сравнения системы регулирования, называется задающим воздействием или входным сигналом, или величиной на входе системы.
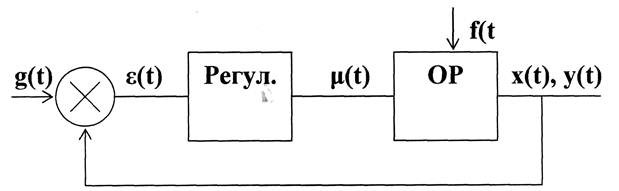
Рис. 1.1.3. Обобщенная структурная схема системы автоматического регулирования
g(t) - задающее воздействие;
ε(t) - сигнал ошибки (рассогласования);
μ(t) - регулирующее воздействие;
f(t) - возмущающее воздействие;
x(t) - регулируемая переменная;
y(t)- выходная координата.
Величиной на входе будем называть регулируемую величин
5) вспомогательное сравнивающее устройство 5, сопоставляющее сигнал в промежуточной точке прямой цепи с сигналом местной обратной связи;
6) усилительное устройство 6;
7) управляющее устройство 7, вырабатывающее регулирующее воздействие u(t), прикладываемое к объекту регулирования;
8) параллельное корректирующее устройство 8, придающее системе требуемые динамические свойства;
9) измерительное устройство или чувствительный элемент 9, воспринимающий изменения регулируемой величины (переменной);
10) устройство главной обратной связи 10, выполняющее
функциональное преобразование, или модуляцию сигнала чувствительного
элемента.
Часть регулятора, формирующая сигнал ошибки s(t), называется датчиком регулятора. Датчик регулятора состоит из задающего, измерительного и сравнивающего устройств.
Часть регулятора, преобразующая сигнал ошибки e(t) в регулирующее воздействие u(t), называется сервомеханизмом.
Итак, всякая САР состоит из трех частей: объекта, датчика и сервомеханизма.
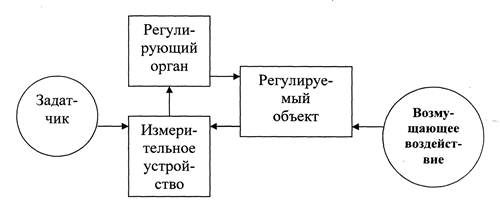
Регулятор, в котором имеется усилительно - преобразовательное устройство, питаемое извне от добавочного источника энергии, называется регулятором непрямого действия. В простейших регуляторах усилительно-преобразовательного устройства и привода может и не быть вовсе, то есть измерительное устройство может непосредственно (без дополнительного источника энергии) воздействовать на регулирующий орган (рис. 1.1.5.).
Такой регулятор называется регулятором прямого действия. Питание регулятора прямого действия энергией идет не извне, а целиком за счет энергии самого регулируемого объекта, подаваемой через измерительное устройство.
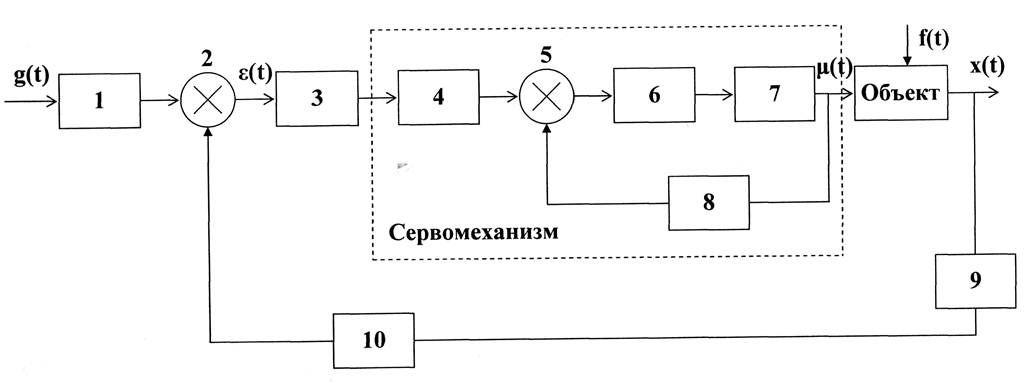
Рис. 1.1.4. Типовая функциональная схема САР с одной регулируемой величиной x(t)
Рис. 1.1.5. Система регулирования с регулятором прямого действия
§1.2. Фундаментальные принципы управления
Зная, статические и динамические свойства управления системы, можно построить математическую модель системы и найти такой алгоритм управления, который обеспечивает заданный алгоритм функционирования при известных, заданных воздействиях. Однако модель всегда приближенно выражает свойства оригинала, а возмущающие воздействия могут изменяться не известным заранее образом, поэтому при найденном алгоритме управления фактическое поведение системы будет отличаться от желаемого, определяемого алгоритма функционирования.
Чтобы приблизить поведение к требуемому, алгоритм управления нужно увязать не только со свойствами системы и алгоритмом функционирования, но и с фактическим функционированием системы.
В технике известны и используются три фундаментальных принципа: разомкнутого управления, компенсации и обратной связи.
| <== предыдущая страница | | | следующая страница ==> |
| II. По способу поддержания ритма различают поточные линии с регламентированным и свободным ритмом | | | Принцип разомкнутого управления |
Дата добавления: 2014-03-11; просмотров: 1174; Нарушение авторских прав

Мы поможем в написании ваших работ!