Матричная запись систем уравнений
Date: 2015-10-07; view: 516.
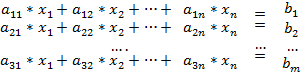
В этой системе m- уравнений и n-неизвестных.  – или переменные, числа
– или переменные, числа  – к-т при
– к-т при  в i-ом уравнении,
в i-ом уравнении,  - свободные члены.
- свободные члены.
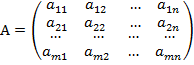
Рассмотрим матрицу системы:


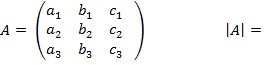
5. Вычисление определителей 2-го и 3-го порядков. Определитель n-го порядка для квадратной матрицы. Свойства определителя.
Каждая квадратная М имеет определитель.

Определитель n-го порядка.
Назовем определителем сумму вида:

 - элемент i-ой строки.
- элемент i-ой строки.
 – определитель, полученный вычеркиванием i-ой строки и каждого столбца.
– определитель, полученный вычеркиванием i-ой строки и каждого столбца.
Замечание: Выбор сроки не влияет на значение определителя.
Это индуктивное определение.
Свойства:
1. 
2. Если 2 строки (столбца) равны между собой, то def М = 0
3.def, содержащий нулевую строку (столбец) =0
4. Если поменять местами 2 строки (), то знак def поменяется на противоположный.
5. Общий множитель строки () можно вынести за знак определителя.
6. Если каждый элемент некоторой строки () представлен в виде суммы 2-х слагаемых, то def может быть представлен в виде суммы 2-х определителей.
7. Определитель не измениться. Если к эл-м некоторой строки () прибавить элементы другой строки(), умноженные на одно и тоже число.
8. Сумма произведений к-либо строки () def на алгебраические дополнения, соответствующие другой строке () равна 0
9.def произведения 2-х матриц равен произведению их определителей, даже в том случае, если АВ≠ВА
6. Системы линейных уравнений. Основные понятия. Метод Гаусса. Общее и частное решение системы.
В этой системе m- уравнений и n-неизвестных. – или переменные, числа – к-т при в i-ом уравнении, - свободные члены.
Опр. Решением системы (1) называется упорядоченный набор чисел (x10,x20,x30,...,xn0), который при подстановке каждое уравнение системы (1) обращает в истинное равенство
Опр.Система линейных уравнений называется совместной, если она имеет хотя бы одно решение. Система линейных уравнений называется несовместной, если она не имеет ни одного решения.
1) Совместная: 3x-y=3 и –x+y=1 Решение (2,3)
2) Несовместная: x+2y=3 и x+2y=5 Не могут выполняться одновременно.
Опр. Система линейных уравнений называется определенной, если она имеет единственное решение. Если система имеет более одного решения, то она называется неопределенной.
3) Система, приведенная в 1 примере, является определенной системой.
4) Неопределенная: х+у=1 и 3х+3у=3 (0,1) (-2,3) и т.д.
Опр. Две системы линейных уравнений называются равносильными, если они имеют одно и то же множество решений
5)  Имеют обе единственное решение - (2,1)
Имеют обе единственное решение - (2,1)
Заметим, что любые две несовместные системы с одинаковым числом переменных равносильны
Опр. Система (1), у которой все свободные члены равны нулю, называется однородной.
Очевидно, что любая однородная система совместна, т.к. в множество решений такой системы всегда входит набор (0,0,..., 0). Введем два вида гауссовских преобразований линейных систем
Преобразование 1 вида. В системе к одному из уравнений прибавляется другое уравнение системы, умноженное на какое-либо действительное число.
Преобразование II вида. В системе одно из уравнений умножается на какое-нибудь число, отличное от нуля.
Утверждение 1(2). Преобразование 1 (2) вида приводит исходную систему линейных уравнений в равносильную ей систему.
Для решения системы выпишем таблицу.
Будем применять к ней преобразования:
1. 1 и 2 вида к строкам
2. Вычеркивать 0 строки
3. Менять местами строки (столбцы)
С помощью них изменяем таблицу так, чтобы она стала треугольной (единственное решение) или трапециевидной (система неопределенна и имеет бесконечное мн-во решений).
В общем решении содержится бесконечное мн-во решений. Задавая значения свободной переменной (-ным) получаем частные решения (получая базисные)
7. Понятие обратной матрицы, необходимые и достаточные условия ее существования. Утверждения, связанные с необходимыми условиями существования обратной матрицы.
Назовем М В обратной к матрице А, если АВ=ВА=Е. В таком случае В = А-1
Необходимое. Назовем квадратную м А вырожденной, если def(A)=0 и невырожденной, если def(A)≠0. Каждая невырожденная матрица имеет обратную
Утверждение 1. Если def =0. То между строками м существует линейная зависимость.
Утверждение 2. Пусть между строками м А существует линейная зависимость. Тогда в произведении АВб какой бы ни была м В, сущ-ет такая же линейная зависимость, как в исходной м А.
Утверждение 3. Вырожденная м не имеет обратной.
Достаточное.Если определитель матрицы отличен от нуля, то для нее сущ-ет обратная матрица, причем единственная.
8. Теорема существования обратной матрицы. Вычисление обратной матрицы. Решение систем линейных уравнений и матричных уравнений с использованием обратной матрицы.
Теорема: Если определитель матрицы отличен от нуля, то для нее сущ-ет обратная матрица, причем единственная.
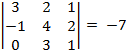
1. Определитель.
2. Миноры
3. Транспонируем (меняем строки со столбцами)
3. 

Решение (2,2)
9. Понятие ранга матрицы. Теорема о ранге матрицы. Нахождение ранга матрицы.
Рангом матрицы относительно строк (столбцов) – наибольшее число её линейно независимых векторов трок (столбцов).
Формально это 2 разных определения, но:
Теорема:
Ранг матрицы А(m*n) относительно векторов - строк равен рангу матрицы относительно векторов - столбцов.
Очевидно, что rang(A)≤min(m, n)
Для нахождения ранга М – тот же алгоритм. Но теперь будем учитывать Гауссовы преобразования, и к столбцам. При нахождении ранга можно:
1. Применить преобразования 1и 2вида к строкам и столбцам.
2. Вычеркивать 0 строки.
3. Менять местами строки.
4. -//- столбцы
Утверждение:
Преобразования 1 и 2вида не изменяют линейной зависимости или независимости векторов.
Пример. Найти РМ
Rang(A) = 2. Строки матрицы непропорциональны, поэтому они линейно независимы.
| <== previous lecture | | | next lecture ==> |
| Произведение матриц. | | | Определение ранга ч-з минор. Метод окаймляющих миноров. |