Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Принципы построения приемных устройств СС
При рассмотрении вариантов построения приемников СС следует исходить из конечного времени вхождения в синхронизм, которое в основном зависит от количества каналов ЦСП. Рассмотрим основные варианты построения схем приемников СС,
Приемник синхросигнала с задержкой контроля и одноразрядным сдвигом. Структурная схема приемника СС 1-го типа приведена на рисунке 65.
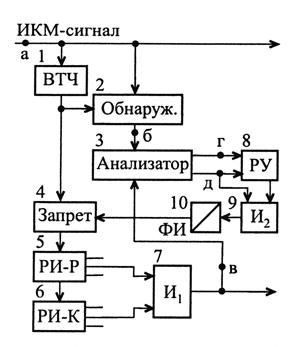
Рисунок 65 – Структурная схема приемника СС 1-го типа
Работу схемы рассмотрим в двух режимах. Первый – режим синхронизма (рисунок 66).
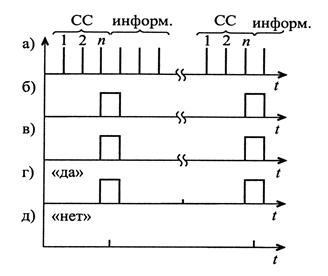
Рисунок 66 – Диаграммы, поясняющие работу приемника СС в режиме
синхронизма
В момент появления истинной синхрогруппы (а) с обнаружителя 2 на анализатор 3 поступает импульс, свидетельствующий о наличии синхросигнала (б). Одновременно с выделенным СС на анализатор поступает и СС от ГОпр (в), формируемый с помощью РИ-К (6), РИ-Р (5)и схемы И1 (7), (см. рисунок 65). По выходу «да» анализатора в этом случае вырабатывается импульс подтверждения (г), на выходе «нет» сигнал отсутствует (д), схема запрета (4) не изменяет режим прохождения импульсов от задающего генератора или выделителя тактовой частоты ВТЧ (1).
В режиме отсутствия синхронизма (рис.56), когда в ИКМ-сигнале (а) позиции выделенной синхрогруппы (б) не совпадают по времени с синхроимпульсом ГОпр (в), анализатор по выходу «нет» (д) выдает импульс (сигнал о наличии ошибки), и этот импульс пройдет в схему запрета (4) через схему И (2).
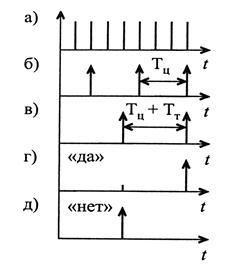
Рисунок 67 – Диаграммы, поясняющие работу приемника СС
в режиме отсутствия синхронизма
Схема запрета в этом случае приостановит (запретит) прохождение одного импульса от ВТЧ (1), и работа распределителей импульсов начинается с задержкой на тактовый интервал, т.е. следующий импульс синхронизации ГОпр появится через время t = nNTт + Tт = Tц + Tт,
где n – число разрядов в кодовой комбинации;
N – число канальных интервалов в цикле передачи.
Максимальное число шагов поиска в этом случае составит (nN – 1), а время вхождения в синхронизм – соответственно tвх.с.max = Tц(nN – 1).
При использовании приемника СС с задержкой контроля и одноразрядным сдвигов в системе типа ИКМ-30 (п = 8; N = 32) время вхождения в синхронизм составит tвх.с ≤ 125·10-6 · (256 – 1) ≈ 30 мс, что по ранее указанным причинам неприемлемо. Следовательно, такого рода приемники СС целесообразно строить только для малоканальных систем.
Приемник синхросигнала со скользящим поиском. Схема его представлена на рисунке 68.
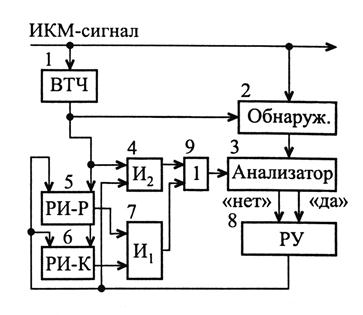
Рисунок 68 – Структурная схема приемника синхросигнала
со скользящим поиском
По сравнению с приемником, показанным на рисунке 65, изменения в данной схеме вызваны стремлением уменьшить время поиска синхронизма (вхождение в синхронизм tвх.с), при этом работа в режиме установившейся синхронизации ни чем не отличается от предыдущего варианта. Как только произошел сбой синхронизации, на выходе РУ (8) появляется сигнал сбоя, который поступает на схему И2 (4) и дает ей разрешение на прохождение импульсов от ВТЧ (1). Одновременно этот сигнал принудительно устанавливает РИ-Р (5) и РИ-К (6) в одно заранее известное положение (например, все выходы в положение «0»). Со схемы И1 (7) на схему ИЛИ (9) поступает «0». Схема И2 (4) пропускает лишь импульсы тактовой частоты (с ВТЧ), которыми производится проверка состояния анализатора на всех позициях приходящего ИКМ-сигнала с каждым тактовым импульсом, т.е. гораздо быстрее, чем в случае приемника СС с задержкой контроля. Как только один из импульсов от ВТЧ совпадет с СС входного сигнала, анализатор (3) сигналом «да» сбросит РУ (8), запустится ГОпр, закроется схема И2 (4), вследствие чего на анализатор (3) будут проходить импульсы только с ГОпр, т.е. с выхода И1. Время вхождения в синхронизм в этом случае составит: tвх.с ≤ Tц = 125мкс.
В реальных условиях «захват» синхронизма может произойти с ложной синхрогруппой, т.е. раньше, чем придет истинный синхросигнал. Тогда генераторное оборудование проработает некоторое время, пока в РУ не накопится d ошибок, а затем снова начнется режим поиска. В этом случае максимальной tвх.с составит tвх.с.max = (d + 1)Tц. Среднестатистическое значение tвх.с принято считать равным порядка (1 ÷ 2) Tц. Такая величина вполне удовлетворяет современным системам передачи, поэтому приемники синхросигнала со скользящим поиском получили наибольшее распространение.
Вывод:
Прием и обработка синхросигналов осуществляется приемниками синхросигнала (ПСС) для установления синхронизма после включения системы передачи, при сбое в работе, контроля за синхронной работой управляющих устройств и обнаружение сбоев. Для этого необходим поиск синхрогруппы на приемной стороне.
ПСС классифицируются по алгоритму поиска состояния синхронизма, по числу тактов разрядов сдвига синхрогруппы и по типу принимаемой синхрогруппы. Для всех вариантов построения ПСС имеются общие основные устройства: обнаружители в цифровом случайном потоке группы символов, совпадающей со структурой СС, анализаторы и решающие устройства. Задача этих устройств состоит в обнаружении, проверке совпадения синхроимпульсов ГОпрд с ГОпрм и выработки решения о наличии или отсутствия сбоя синхронизма.
Рассмотрены варианты построения ПСС. По времени вхождения в синхронизм tвх.с при минимальном количестве ошибок при «захвате» ложных синхрогрупп в современных цифровых системах передачи вполне удовлетворяет схема приемника синхросигнала со скользящим поиском (tвх.с ≤ Тц = 125 мкс).
Контрольные вопросы:
1. Назовите классификацию приемников синхросигналов.
2. Поясните работу обнаружителя синхросигнала по структурной схеме.
3. Поясните принцип проверки совпадения синхроимпульса анализатором.
4. Покажите по структурной схеме анализатора принцип появления на его выходе импульса «да» или «нет».
5. Сформулируйте назначение решающего устройства ПСС и его задачи в случае сбоя синхронизма.
6. Поясните работу решающего устройства по структурной схеме.
7. Поясните работу ПСС с задержкой контроля и одноразрядным сдвигом в режимах синхронизма и его отсутствия.
8. Поясните работу ПСС со скользящим поиском по структурной схеме. Сделайте выводы по достоинствам ПСС.
Список литературы
1 Баева Н.Н. Многоканальная электросвязь и РРЛ: Учебник для ВУЗов. – М.: Радио и связь, 1988.
2 Беллами Дж. Цифровая телефония: Пер. с англ./Под ред. А.Н.Берлина, Ю.Н.Чернышева. – М.: Эко-Трендз,2004.
3 Венедиктов М.Д., Женевский Ю.П., Марков В.А. Дельта-модуляция. Теория и применение. – М.: Связь, 1976.
4 Гитлиц М.В., Лев А.Ю. Теоритические основы многоканальной связи. – М.: Радио и связь, 1985.
5 Гордиенко В.Н., Тверецкий М.С. Многоканальные телекоммуникационные системы. – М.: «Горячая линия-Телеком», 2005.
6 Голубев А.Н., Иванов Ю.П., Левин Л.С. и др. Аппаратура ИКМ-30. – М.: Радио и связь,1982.
7 Гуревич В.Э., Лопушнян Ю.Г., Рабинович Г.В. Импульсно-кодовая модуляция в многоканальной телефонной связи. – М.: Связь, 1973.
8 Евсеенко Г.Н. Цифровые системы передачи: Учебное пособие. – Ростов-на Дону: РКСИ, 2005.
9 Зингеренко А.М., Баева Н.Н., Тверецкий М.С. Системы многоканальной связи. – М.: Связь, 1980.
10 Кириллов В.И. Многоканальные системы передачи. – М.: ООО «Новое знание», 2000.
11 Левин Л.П., Плоткин М.А. Цифровые системы передачи. – М.: Радио и связь, 1982.
12 Скалин Ю.В., Бернштейн А.Г., Финкевич А.Д. Цифровые системы передачи: Учебник для электротехникумов связи. – М.: Радио и связь, 1988.
13 Соколов Н.А. Телекоммуникационные сети. Монография в 4-х главах. Часть 3 (глава 3). – М.: Альварес Паблишинг, 2004.
14 Соколов Н.А. Телекоммуникационные сети. Монография в 4-х главах. Часть4 (глава 4). – М.: Альварес Паблишинг, 2004.
[*] Теорема была сформулирована и доказана академиком В.А. Котельниковым в 1931 году. Двумя годами позже (в 1933г.) Г. Найквистом (США) получена теорема о минимальной частоте дискретизации, названная критерием Найквиста, что то же самое.
| <== предыдущая страница | | | следующая страница ==> |
| Классификация и принцип обнаружения СС на приеме | | | ISBN 5-86607-257-2 |
Дата добавления: 2014-09-10; просмотров: 425; Нарушение авторских прав

Мы поможем в написании ваших работ!