Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Элементы теории электрических фильтров
Пусть фильтр пропускает сигналы низкой частоты от w1 = 0 до w2 = wс. Коэффициент передачи

 ,
,
где A, B, Zн – параметры, зависящие от частоты f.  – амплитудно-частотная характеристика (АЧХ),
– амплитудно-частотная характеристика (АЧХ),  (w) – фазо-частотная
(w) – фазо-частотная
характеристика (ФЧХ). В полосе пропускания K(w) идеального фильтра U1 = U2, то есть K(w) = 1 сигнал не искажается. Если  , то для nw1 £ wc, то сигнал не искажается при K(w) = 1 и
, то для nw1 £ wc, то сигнал не искажается при K(w) = 1 и  , то есть при линейной фазо-частотной характеристике. Сдвиг k-й гармоники равен
, то есть при линейной фазо-частотной характеристике. Сдвиг k-й гармоники равен  , что эквивалентно сдвигу
, что эквивалентно сдвигу  , то есть каждая гармоника, проходя через фильтр, запаздывает на одно и то же время t, поэтому форма не меняется.
, то есть каждая гармоника, проходя через фильтр, запаздывает на одно и то же время t, поэтому форма не меняется.

 При согласованной нагрузке
При согласованной нагрузке  . В полосе пропускания a = 0 b- . Если в полосе пропускания K(w) зависит
. В полосе пропускания a = 0 b- . Если в полосе пропускания K(w) зависит
от частоты, а фазо-частотная характеристика искажена, то возникают амплитудные и фазовые искажения.
1.3. Симметричные реактивные фильтры
Симметричный четырехполюсник характеризуется A = D = chg, B=Zcshg,  , а Zc и g -
, а Zc и g -  ,
,  или chg = A.
или chg = A.
Пусть фильтр чисто реактивный.
 |
 (1.1)
(1.1)
 (1.2)
(1.2)
Из (1.1) и (1.2) следует, что А не может принимать мнимых значений, поэтому уравнение связи А параметров с характеристическими параметрами, записанное в гиперболических функциях

распадается на два:
shasinb = 0, так как мнимые числа
chacosb = A =  .
.
Эти уравнения имеют два решения. Первое решение определяется условием, при котором sha = 0, то есть a = 0, что соответствует полосе пропускания. Из второго уравнения при cha = 1 следует
 . (1.3)
. (1.3)
Из (1.3) следует, что знаки мнимых должны быть одинаковы, то есть одна цепь имеет индуктивный, а другая емкостной характеры. Диапазон частот, удовлетворяющих (1.3)
 ,
,
 поэтому частоты граничные для полосы пропускания
поэтому частоты граничные для полосы пропускания  или
или
 . Разделив на 2, получим условия пропускания «Г»-, «П»-, «Т»-образных фильтров (рис 1.13) в виде неравенства
. Разделив на 2, получим условия пропускания «Г»-, «П»-, «Т»-образных фильтров (рис 1.13) в виде неравенства
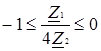
или в виде системы
 (1.4)
(1.4)
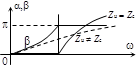
Частоты среза находятся из (1.4) аналитически или графически как показано на рис. 1.14

1.4. Электрический фильтр как четырехполюсник
Пусть имеется четырехполюсник, схема замещения которого может быть представлена в Т или П виде (рис. 1.15).
 |
Для таких схем замещения ранее была установлена связь ее параметров с А параметрами системы уравнений, описывающих четырехполюсник.








Если обозначить параметры схемы замещения четырехполюсника параметрами, принятыми для схем замещения фильтров (рис. 1.16),
 |
то получим для «Т» и «П»-образных схем замещения следующие соотношения.
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Для «Г»-образной схемы замещения (рис. 1.17)
 |
из (1.1) имеем АГ = 1, 


1.5. Характеристические параметры фильтров
Согласованное сопротивление фильтра со стороны входа





 ½: 4Z2½;
½: 4Z2½;
 .
.
Согласованное сопротивление фильтра со стороны выхода

 .
.

 ;
;  .
.
Для осуществления согласованного режима работы фильтра необходимо выполнение равенства
ZC = ZПР,
где ZC – характеристическое сопротивление, ZПР – сопротивление нагрузки. Для этого необходимо знать зависимость характеристического сопротивления ZС от w.
 ;
;  .
.
Фильтр низкой частоты
 ,
,  .
.
Для «Т»
 .
.

Для «П»


В полосе пропускания (ПП) – характеристическое сопротивление чисто активное. В полосе затухания (ПЗ) -  , так как w > w0 – индуктивный характер
, так как w > w0 – индуктивный характер
(верхняя полуплоскость) и  , так как w > w0 – емкостной характер (нижняя полуплоскость).
, так как w > w0 – емкостной характер (нижняя полуплоскость).
Мера передачи для «Т» и «П»- образных схем замещения фильтра может быть найдена из любого выражения

 ; (1)
; (1)
 .
.
Мера передачи для «Г»-образного фильтра может быть найдена как
 ;
;

Меру передачи для «Т»- и «П»-образных схем записывают в виде  , а меру передачи для «Г»-образных схем -
, а меру передачи для «Г»-образных схем -  .
.
1.5. Основные соотношения
Параметры меры передачи и выражения для определения граничных частот могут быть сведены в таблицу 1.
Таблица 1
| Полоса пропускания |  или или
 
| а = 0 | 
|
| Полоса затухания | 
| 
| 
|

| 
|  , ,
|
где  - нормированная частота;
- нормированная частота;
1.6. Фильтры типа k
Фильтрами типа k называют фильтры, у которых Z1Z2 = R2. Параметр  называют номинальным характеристическим сопротивлением.
называют номинальным характеристическим сопротивлением.
 Если построить частотные характеристики фильтра (рис. 1.19) в режиме холостого хода, то граничные частоты могут быть определены графическим способом как это показано на рис.1.19.
Если построить частотные характеристики фильтра (рис. 1.19) в режиме холостого хода, то граничные частоты могут быть определены графическим способом как это показано на рис.1.19.
 Как видно из рис. 1.19 a в полосе затухания не равно ¥, поэтому с целью получения большого коэффициента затухания фильтр составляется из нескольких звеньев, соединенных каскадно (рис. 1.20).
Как видно из рис. 1.19 a в полосе затухания не равно ¥, поэтому с целью получения большого коэффициента затухания фильтр составляется из нескольких звеньев, соединенных каскадно (рис. 1.20).

Zвх = ZП; Zпр = ZГ;  ;
;  ;
;  .
.
Недостатки:
1. Небольшая крутизна частотной кривой затухания, что не обеспечивает четкого разделения частоты среза.
2. Резкое изменение частотных кривых характеристических сопротивлений ZСТ и ZСП в полосе пропускания, вследствие чего не удается согласовать фильтр с нагрузкой во всей полосе пропускания.
Полученные результаты анализа фильтров сведены в таблицу 2.
Таблица 2
| ФНЧ | ФВЧ | ПФ | ЗФ | |
       
|

|
|

|

|
| Граничные ча стоты ПП | 


|


|  

| 
|
    Частотная зависимость a и b Частотная зависимость a и b
|
ПП a=0  ПЗ
ПЗ  
| |||
    Частотная зависимость ZC Частотная зависимость ZC
|


|

|


|
 
|
| Параметры |  
 
|  
 
|  


|  


|
Фильтры типа m являются производными фильтров типа k. Произведение продольного сопротивления на поперечное зависит от частоты. Фильтры типа m обладают следующими достоинствами:
1.повышают затухание вблизи граничных частот;
2.просто осуществляют согласование с нагрузкой.
В качестве недостатков следует отметить малое затухание на частотах в полосе затухания.
Увеличение скорости роста a(w) вблизи граничной частоты обеспечивается таким подбором параметров последовательного или параллельного соединения соответственно в поперечной или продольной ветвях фильтра, при которых возникают резонансные явления.
 Например, для исходного прототипа “Г”-образного звена фильтра низкой частоты, изображенного на рис. 1.22, увеличение скорости достигается путем введения индуктивности Lx в поперечную ветвь или емкости Сх в продольную ветвь как это показано на рис. 1.23.
Например, для исходного прототипа “Г”-образного звена фильтра низкой частоты, изображенного на рис. 1.22, увеличение скорости достигается путем введения индуктивности Lx в поперечную ветвь или емкости Сх в продольную ветвь как это показано на рис. 1.23.
Z2 = 0 РН
U2 = 0 при
w > wс
последовательно-производный
Z1 = ¥ РТ
U2 = 0
w > wс
параллельно-производный
Границы полосы пропускания типа m определяют, так же как и для соответствующего фильтра типа k. Эти фильтры имеют одинаковые области пропускания, но различные частотные характеристики затухания.
На практике фильтры типа m обычно соединяют каскадно с фильтрами типа k, достигая тем самым желаемого коэффициента затухания в полосе затухания при высоких частотах и большой крутизне роста a(w) около частотного среза.
Фильтр типа m обладает характеристическим сопротивлением ZСП, или ZСТ, поэтому он может быть хорошо согласован со звеньями типа k в многозвенном фильтре. Схемы m фильтров различного назначения показаны на рис. 1.24.
 |
Параметр m для представленных фильтров может быть найден из выражения 
1.6. Безындукционные фильтры
Схемы R, C фильтров различного назначения представлены на рис. 1.25.
 |



Достоинством R, C фильтров являются малые весогабаритные показатели. В качестве недостатков следует отметить слабо выраженные зависимости амплитудно-частотных характеристик.
| <== предыдущая страница | | | следующая страница ==> |
| Классификация фильтров | | | СТРУКТУРА И ЗНАЧЕНИЕ АНАЛИЗАТОРОВ |
Дата добавления: 2015-07-26; просмотров: 597; Нарушение авторских прав

Мы поможем в написании ваших работ!