Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Формула (34) є приблизною, тому що в розрахунках не враховуються втрати в сталі
2.6.17 Струм в колі постійної напруги.
 ; (35)
; (35)
де kИ – коефіціент схеми інвертора.
2.6.18 Напруга в колі постійної напруги.
 ; (36)
; (36)
де hИ – ККД інвертора, який враховує тільки втрати в колі головних резисторів.
2.6.19 Результати розрахунків заносимо в таблицю 2
Таблиця 2 – Розрахунок першої зони регулювання. І1 = const , 
| Параметри | Результати розрахунку | |||||||||
| Р1,Вт | ||||||||||
| α | ||||||||||
| f1,Гц | ||||||||||
| β | ||||||||||
| f2,Гц | ||||||||||
| ω,рад/с | ||||||||||
| V,км/ч | ||||||||||
| М,кНм | ||||||||||
| F,кН | ||||||||||
| Ф1,Вб | ||||||||||
| I1,А | ||||||||||
| Е1,В | ||||||||||
| А(α,β)*10-3Ом2 | ||||||||||
| U1,В | ||||||||||
| Ud,В | ||||||||||
| Id,A | ||||||||||
| cos(φ) |
2.7 Розрахунок другої зони – зони постійної потужності.
P = Pmax = const , Ф = k1 I1;(37)
2.7.1 Початкові умови розрахунку в другій зоні.
U1 =U1ном ; V = V1 ; Ф1к = ФІІн; (38)
де Ф1к – величина магнітного потоку в кінці першої зони регулювання;
ФІІн – величина магнітного потоку на початку другої зони регулювання.
2.7.2 Кінцеві умови розрахунку в другій зоні.
Ud = Udmax; (39)
де Udmax – максимальне значення діючої напруги статора.
2.7.3 Визначення кроку розрахунку тягових характеристик в другій зоні.
 ; (40)
; (40)
де ФІІк – величина магнітного потоку в кінці другої зони регулювання, приймаемо ФІІк = Фmin – із кривої намагнічування ТАД;
n – кількість точок розрахунку, n ³ 10;
2.7.4 Визначення поточного значення магнітного потоку.
 ; (41)
; (41)
де j – номер кроку розрахунку, j = 0,1,2. ...,n.
2.7.5 Розрахунок поточного значення фазного струму двигуна.
 ; (42)
; (42)
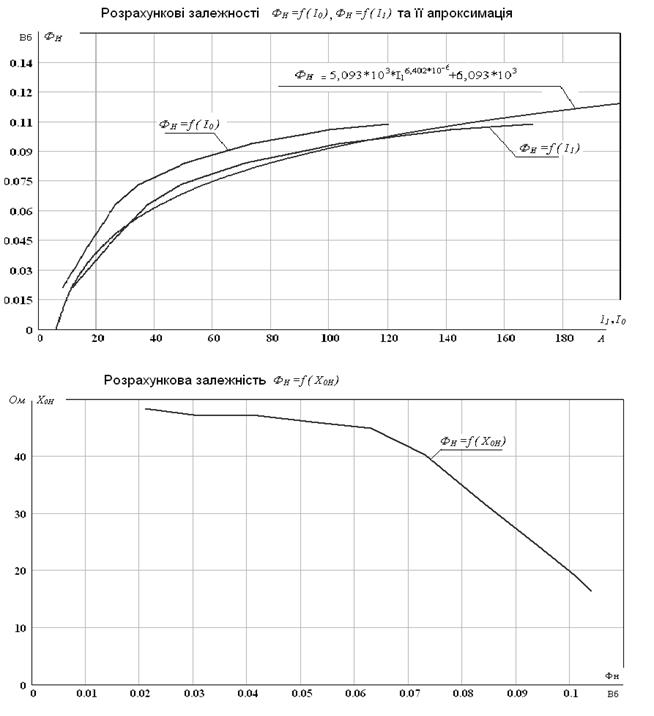
Величину k1 отримати для поточного значення Фj із побудованих в 2.5.5 графіків.
2.7.6 Розрахунок коефіцієнтів розсіяння виконати по формулам (11),(12),(13).Величину Х0Н отримати із графіків побудованих в 2.5.5 для поточного значення магнітного потоку Фj .
2.7.7 Розрахунок абсолютного ковзання визначити по формулі (14).
2.7.8 Розрахунок відносної частоти статора.
 ; (43)
; (43)
де bj – поточне значення абсолютного ковзання;
Сj(b) – поточне значення проміжної величини розрахувати по формулі (16).
2.7.9 Розрахувати частоту струму статора по формулі (20).
2.7.10 Розрахувати частоту струму ротора по формулі (21).
2.7.11 Електромагнітний момент двигуна.
 ; (44)
; (44)
2.7.12 Тягове зусилля електропоїзда розрахувати по формулі (24).
2.7.13 Розрахувати кутову швидкість ротора по формулі (25).
2.7.14 Швидкість руху електропоїзда розрахувати по формулі (26).
2.7.15 Приведене значення електрорухомої сили ротора визначити по формулі (27).
2.7.16 Напругу статора визначити по формулі (28).
2.7.17 Коефіцієнт потужності двигуна.
 ; (45)
; (45)
2.7.18 Струм в колі постійної напруги визначити по формулі (35)
2.7.19 Напруга в колі постійної напруги.
 ; (46)
; (46)
2.7.20 Контроль величини напруги.
Розрахунок другої зони регулювання ведеться до величини:
Udmax - e £ Ud ³ Udmax + e ; (47)
де e = 1В – похибка розрахунку напруги.
При досягненні величини Ud ³ Udmax + e продовжити виконання розрахунку, змінивши величину DФ. Розрахунок ведеться до виконання умови(47).
2.7.21 Окрім умови (47) повинні виконуватись наступні умови:
V< Vmax , a < aгр ; (48)
де Vmax - максимально допустима швидкість;
aгр - максимальне значення відносної частоти статора.
 ; (49)
; (49)
Таблиця 3 - Розрахунок другої зони регулювання. P1 = const , Ф = k1 I1
| Параметри | Результати розрахунку | |||||||||
| Р1,Вт | ||||||||||
| α | ||||||||||
| f1,Гц | ||||||||||
| β | ||||||||||
| f2,Гц | ||||||||||
| ω,рад/с | ||||||||||
| V,км/ч | ||||||||||
| М,кНм | ||||||||||
| F,кН | ||||||||||
| Ф1,Вб | ||||||||||
| I1,А | ||||||||||
| Е1,В | ||||||||||
| А(α,β),Ом2 | ||||||||||
| U1,В | ||||||||||
| Ud,В | ||||||||||
| Id,A | ||||||||||
| cos(φ) |
2.8 Розрахунок третьої зони – зони ослаблення поля.
 ; при
; при  ; (50)
; (50)
2.8.1 Початкові умови розрахунку в третій зоні.
 ;
;  ; (51)
; (51)
2.8.2 Для зони постійної потужності параметр абсолютного ковзання дорівнює:
 ; (52)
; (52)
де  - закон регулювання в І та ІІ зонах регулювання.
- закон регулювання в І та ІІ зонах регулювання.
2.8.3 Для зони обмеженої напруги параметр абсолютного ковзання дорівнює:
 ; (53)
; (53)
де  - закон регулювання в ІІІ зоні регулювання.
- закон регулювання в ІІІ зоні регулювання.
2.8.4 Підставляючи вирази (52) та (53) в формулу (51) отримаємо:
 ; (54)
; (54)
2.8.5 Розв’яжемо це рівняння відносно a.
Отримане значення a визначае частоту переходу з другої зони в третю.
 ; (55)
; (55)
2.8.6 Максимальне значення відносної частоти статора визначається із умови статичної стійкості тягового приводу по наступній формулі:
 ; (56)
; (56)
2.8.7 Коефіцієнт потужності двигуна при роботі по закону (50) дорівнює:
 ; (57)
; (57)
2.8.8 Потужність, яка споживається тяговим двигуном:
 ; (58)
; (58)
2.8.9 З виразу (57) з урахуванням (50) отримаємо формулу для розрахунку фазної напруги:
 ; (59)
; (59)
2.8.10 Частоту струму статора знаходимо по формулі (20).
2.8.11 Частоту струму ротора знаходимо по формулі (21).
2.8.12 Електромагнітний момент двигуна визначаємо по виразу (22).
2.8.13 Тягове зусилля електровоза (24).
2.8.14 Кутову швидкість ротора (25).
2.8.15 Швидкість руху електровоза (26).
2.8.16 Величину магнітного потоку тягового двигуна для третьої зони розраховуємо по наступній формулі:
 ; (60)
; (60)
2.8.17 Приведене значення електрорушійної сили ротора визначаємо по формулі (27).
2.8.18 Струм в колі постійної напруги (35).
2.8.19 Напруга в колі постійної напруги (36).
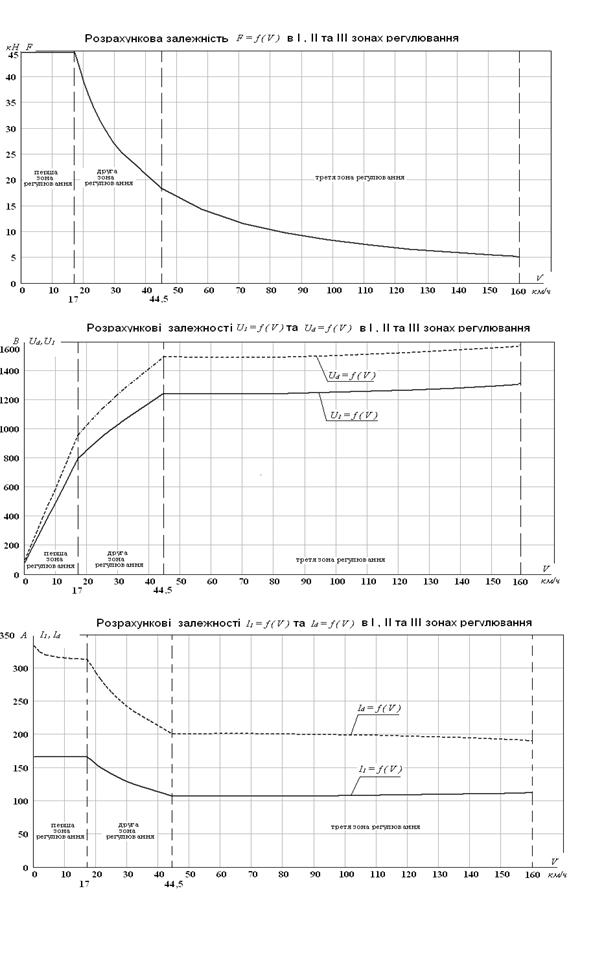
2.8.20 Результати розрахунків заносимо в таблицю 4.
По значенням таблиць 2,3,4 побудувати графіки наступних залежностей: cos(φ) = f(V); f2 = f(V); P1 = f(V); F = f(V); U1 = f(V); Ud = f(V); I1 = f(V); Id = f(V), як показано в прикладі
Таблиця 4 – Розрахунок третьої зони регулювання.  ;
; 
| Параметри | Результати розрахунку | |||||||||
| Р1,Вт | ||||||||||
| α | ||||||||||
| f1,Гц | ||||||||||
| β | ||||||||||
| f2,Гц | ||||||||||
| ω,рад/с | ||||||||||
| V,км/ч | ||||||||||
| М,кНм | ||||||||||
| F,кН | ||||||||||
| Ф1,Вб | ||||||||||
| I1,А | ||||||||||
| Е1,В | ||||||||||
| U1,В | ||||||||||
| Ud,В | ||||||||||
| Id,A | ||||||||||
| cos(φ) |
Приклад тягових та регулювальних характеристик тягового асинхронного електроприводу.

Перелік використаної літератури
[1] “Документація. Звіти у сфері науки і техніки. Структура і правила оформлення ДСТУ 3008-95”. - Київ.: Держстандарт України, 1995. – 36 с.
[2] Коновалов Є.В. Студентська навчальна звітність: Графічні конструкторські документи. Загальні вимоги до побудови, викладання та оформлення: Методичний посібник з додержанням вимог нормоконтролю (нормативних документів) у студентській навчальній звітності. Розділ 2. – Х.: УкрДАЗТ, 2006. – 34с.
[3] Электроподвижной состав с асинхронными тяговыми двигателями /Н.А. Ротанов, А.С. Курбасов, В.В. Литовченко, Ю.Г. Быков, 1991.– 336с.
[4] Теория электрической тяги / В.Е.Розенфельд, И.П.Исаев, Н.Н.Сидоров, М.И.Озеров; Под ред. И.П.Исаева. – М.: Транспорт, 1995. - 294 с.
[5] Сандлер А.С. и Сарбатов Р.С. Частотное управление асинхронними двигателями. - М.-Л.: издательство „Энергия”, 1966. - 144 с.
[6] Электрические передачи переменного тока тепловозов и газотурбовозов / А.Д. Степанов, В.И. Андерс, В.А. Пречисский, Ю.И. Гусевский. – М.: Транспорт, 1982. – 254с.
| № вар. | Тип л-ва | Тип ТАД | Іпуск, А |
| ВЛ8 | НБ607 | ||
| ВЛ8 | НБ607 | ||
| ВЛ10 | АД914У1 | ||
| ВЛ10 | АД914У1 | ||
| ВЛ82 | НБ607 | ||
| ВЛ82 | НБ607 | ||
| ЧС7 | ЕД900 | ||
| ЧС7 | ЕД900 | ||
| ЧС8 | АД906 | ||
| ЧС8 | АД906 | ||
| ВЛ80 | АД914У1 | ||
| ВЛ80 | АД914У1 | ||
| ЕР2р | АД906Д | ||
| ЕР2р | АД906Д | ||
| ЕР9 | АД906 | ||
| ЕР9 | АД906 | ||
| ВЛ8 | НБ607 | ||
| ВЛ10 | АД914У1 | ||
| ВЛ82 | НБ607 | ||
| ЧС7 | ЕД900 | ||
| ЧС8 | АД906 | ||
| ВЛ80 | АД914У1 | ||
| ЕР2р | АД906Д | ||
| ЕР9 | АД906 | ||
| ДЕ1 | АД914У1 | ||
| ДЕ1 | АД914У1 | ||
| ДЕ1 | АД914У1 | ||
| ВЛ80 | АД914У1 | ||
| ВЛ8 | НБ607 | ||
| ЧС8 | АД906 |
Додаток А
Завдання на проектування
Додаток Б
Технічні параметри тягових асинхронних двигунів
| Тип ТАД Параметри | НБ607 | ЕД900 | АД906 | АД906Д | АД914У1 |
| Конструкційний коефіцієнт – С1 | 197,14 | 269,4 | 556,7 | 191,8 | |
| Число фаз – m | |||||
| Кількість полюсів – 2p | |||||
| Потужність – Р, кВт | |||||
| Фазна напруга – U1ф, В * | |||||
| Струм – Ін, А * | |||||
| Базова частота – f1н, Гц | 51,5 | 39,9 | 33,9 | 55,9 | |
| Частота ковзання – f2н, Гц * | 0,511 | 0,76 | 0,67 | 0,65 | 0,479 |
| Коефіцієнт потужності – cosφ1 * | 0,85 | 0,835 | 0,9 | 0,95 | 0,85 |
| Активний опір статора – r1Н, Ом | 0,016 | 0,0317 | 0,083 | 0,29 | 0,0338 |
| Активний опір ротора, приведений до опору статора – r'2н, Ом | 0,016 | 0,0314 | 0,0676 | 0,22 | 0,0221 |
| Реактивний опір розсіювання статора – х1н, Ом ** | 0,11 | 0,114 | 0,343 | 1,09 | 0,2276 |
| Реактивний опір розсіювання ротора, приведений до опору статора – х'2н, Ом ** | 0,188 | 0,119 | 0,298 | 0,71 | 0,2138 |
| Частота обертання – n, об/хв * | |||||
| ККД – η, в.о. | 0,94 | 0,915 | 0,93 | 0,935 | 0,955 |
Примітка: * – в номінальному режимі;
** – в номінальному режимі при базовій частоті.
Додаток В
Крива намагнічування ТАД
| Іо, в.о. | 0,40 | 0,80 | 1,0 | 1,20 | 1,60 | 2,00 | 2,40 | 2,80 | 3,20 |
| Ф, Вб | 0,0291 | 0,0546 | 0,0635 | 0,0712 | 0,0805 | 0,0871 | 0,0922 | 0,0959 | 0,0979 |
| <== предыдущая страница | | | следующая страница ==> |
| | | ОРГАНІЗАЦІЯ САМОСТІЙНОЇ РОБОТИ |
Дата добавления: 2015-07-26; просмотров: 195; Нарушение авторских прав

Мы поможем в написании ваших работ!