Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Обратная связь двух автоматов
Пусть автоматы М1 и М2 соединены так, как показано на рис. 2.14. При таком соединении Q = (Q1 Ä Q2), Y1=X2=Y и d:(XÄY2)®X1.

Рис. 2.14 Композиция двух автоматов по схеме обратной связи.
Функционирование такого автомата M может быть описано системой рекуррентных соотношений:
 (2.6)
(2.6)
Оператор d определяет значение входного символа для автомата М1 согласно задаче, поставленной автомату М, так как
d:(XÄY2)®X1. (2.7)
Пусть оператор d задан таблицей 2.12.
Таблица 2.12
| символ входного алфавита xÎX | символ выходного алфавита yÎY | |
| y21 | y22 | |
| x1 | x11 | x12 |
| x5 | x12 | x11 |
Для композиции автоматов значения y2i должны не зависеть от выходного символа для автомата М, то есть y2i= j2(q2). Поэтому в линии обратной связи должен быть только автомат Мура. Пусть таблицей 2.13 дано описание автомата Мура для композиции по схеме обратной связи.
Таблица 2.13
| текущее состояние q2ÎQ2 | символы входного алфавита yÎY | выход y2=j2(q2[t]) | ||
| y1 | y2 | y3 | ||
| q21 | q21 | q22 | q21 | y21 |
| q22 | q22 | q22 | q21 | y22 |
В этом случае система рекурсивного описания автомата М имеет вид:
 (2.8)
(2.8)
Таблица поведения автомата М (см. таблицу 2.14) должна иметь символами входного алфавита элементы области определения оператора d, то есть (xi;q2j). Символом "*" обозначены позиции, для которых нет элементов в области определения оператора d.
Таблица 2.14.
| текущее состояние | аргумент функции d(x[t];j2(q2[t])) | |||
| (x1;y21) | (x1;y22) | (x5;y21) | (x5;y22) | |
| q1=(q11;q21) | q3;y1 | * | q1;y3 | * |
| q2=(q11;q22) | * | q1;y3 | * | q4;y1 |
| q3=(q12;q21) | q6;y2 | * | q3;y1 | * |
| q4=(q12;q22) | * | q4;y1 | * | q6;y2 |
| q5=(q13;q21) | q5;y1 | * | q1;y1 | * |
| q6=(q13;q22) | * | q2;y1 | * | q6;y1 |

Рис.2.15 Граф композиции автоматов по схеме обратной связи.
2.2. Сумма автоматов
Композиция автоматов M1 и M2 при асинхронном режиме их работы есть автомат M=áX;Y;Q;y;jñ, внутренние состояния которого qÎQ=(Q1ÈQ2), а поведение описано в таблице 2.15.
Таблица 2.15
| текущее состояние qÎQ1 | символы входного алфавита xÎX=(X1ÈX2) | ||||
| x11 | x12 | x21 | x22 | x23 | |
| q11 | q12;y11 | q11;y13 | — | — | — |
| q12 | q13;y12 | q12;y11 | — | — | — |
| q13 | q13;y11 | q11;y11 | — | — | — |
| q21 | — | — | q21;y21 | q22;y21 | q21;y22 |
| q22 | — | — | q22;y21 | q22;y21 | q21;y22 |
Для того, чтобы из двух автоматов сформировать сеть, необходимо определить заключительное состояние qk первого в очереди автомата, начальное состояние q0 второго в очереди автомата и соединить эти состояния. Только в этом случае будет происходить переключение "внешней среды" с входного алфавита X1 первого автомата на входной алфавит X2 второго автомата.
Пусть первым начинает работать автомат М1 и его заключительное состояние q13 тождественно начальному состоянию q21 автомата М2, . Для этого случая (q13=q21=q) поведение суммы двух автоматов показано таблицей 2.16, а граф - рис. 2.15.
Таблица 2.16
| текущее состояние qÎQ1 | символы входного алфавита xÎX=(X1ÈX2) | ||||
| x11 | x12 | x21 | x22 | x23 | |
| q11 | q12;y11 | q11;y13 | — | — | — |
| q12 | q;y12 | q12;y11 | — | — | — |
| q | q;y11 | q11;y11 | q;y21 | q22;y21 | q;y22 |
| q22 | — | — | q22;y21 | q22;y21 | q;y22 |

Рис. 2.15 Сумма двух автоматов для q13=q21=q.
Пусть первым начинает работать автомат М2 и его заключительное состояние q22 тождественно начальному состоянию q11 автомата М1. Для этого случая (q22=q11=q) поведение суммы двух автоматов показано таблицей 2.17, а граф - рис. 2.16.
Таблица 2.17
| текущее состояние qÎQ1 | символы входного алфавита xÎX=(X1ÈX2) | ||||
| x11 | x12 | x21 | x22 | x23 | |
| q21 | — | — | q21;y21 | q;y21 | q21;y22 |
| q | q12;y11 | q;y13 | q;y21 | q;y22 | q21;y22 |
| q12 | q13;y12 | q12;y11 | — | — | — |
| q13 | q13;y11 | q;y11 | — | — | — |
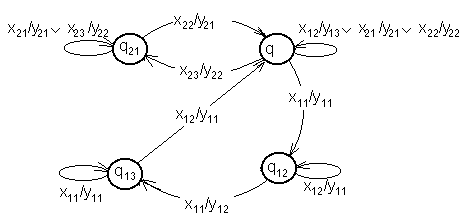
Рис. 2.16 Сумма двух автоматов для (q22=q11=q).
Анализ показывает, что сумма автоматов некоммутативная операция и требует указания очередности и отождествления заключительного состояния qk очередного и начального состояния q0последующего автоматов.
Контрольные вопросы и задачи.
1) Что такое "произведение автоматов"?
2) Что такое "сумма автоматов"?
3) Какие особенности в формировании "обратной связи"?
4) Автоматы М1 и М2 описаны таблицами поведения:
| Автомат М1 | Автомат М2 | |||||
| текущее состояние q1iÎQ1 | символы входного алфавита x1iÎX1 | текущее состояние q2jÎQ2 | символы входного алфавита x2jÎX2 | |||
| q10 | q10;1 | q11;0 | q20 | q20;0 | q21;1 | |
| q11 | q11;0 | q12;1 | q21 | q21;1 | q22;0 | |
| q12 | q12;1 | q13;0 | q22 | q22;0 | q20;1 | |
| q13 | q13;0 | q10;1 |
4.1. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.25;
4.2. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.29a);
4.3. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.29b);
4.4. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.29c); пусть если y2=0, то на выходе автомата М генерируется выходной символ автомата М1, если y2=1, то - выходной символ автомата М2;
4.5. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.29d) при условии:
если y2=0, то на выходе автомата М генерируется выходной символ автомата М1,
если y2=1, то - выходной символ автомата М2.
4.6. Составить таблицу поведения и начертить граф композиции автоматов по рис. 1.34 при условии:
если x=1 и y2=0 или x=0 и y2=1, то x1=1,
если x=0 и y2=0 или x=1 и y2=1, то x1=0.
| <== предыдущая страница | | | следующая страница ==> |
| Параллельное соединение двух автоматов | | | Автоматное моделирование алгоритмов |
Дата добавления: 2015-07-26; просмотров: 243; Нарушение авторских прав

Мы поможем в написании ваших работ!