Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Автоматизация процессов работы экскаваторов
Существенным средством повышения производительности одноковшовых экскаваторов является автоматизация процесса их управления (работы). Известно, что при производстве земляных работ одноковшовым экскаватором вследствие криволинейного движения ковша в зоне резанья грунта образуется профиль, обусловленный траекторией этого движения. Ручная доводка полученного профиля с целью выравнивания поверхности основания составляет 10…20% общего объема земляных работ и более 70% их трудоемкости. Для ликвидации ручной доводки профиля необходимо поддержание заданной зависимости между углами поворота стрелы и рукоятки, обеспечивающей прямолинейное перемещение ковша гидравлического экскаватора. Для этого используется следящее устройство, схема которого приведена на рис. 1.12.
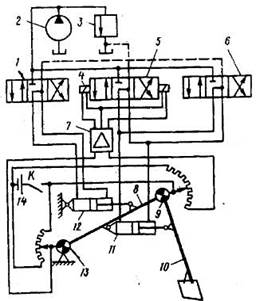
Рис. 1.12. Схема рабочего оборудования экскаватора со следящим устройством
Рабочее оборудование экскаватора включает стрелу 8, рукоять 10, гидроцилиндр 12 поворота стрелы, гидроцилиндр 11 поворота рукояти, золотник 5, имеющий электромагниты управления 4, распределительные золотники 1 и 6, гидронасос 2 с предохранительным клапаном 3. Электромагниты управления 4 золотника 5 подключены к электрической системе, состоящей из источника питания 14, усилителя 7 и датчиков 9 и 13 углов поворота, установленных в шарнирной опоре стрелы и в шарнире крепления рукояти к стреле.
Следящая система работает следующим образом. При изменении угла наклона стрелы гидроцилиндром 12 с помощью золотника 1 происходит изменение сопротивления датчика 13 угла поворота, которое до включения было сбалансировано сопротивлением датчика 9 угла поворота. Рассогласование сопротивлений вызывает сигнал в виде электрического тока определенного направления, который через усилитель 7 подается на соответствующий электромагнит золотника 5, вызывая срабатывание гидроцилиндра 11, который изменяет угол между стрелой и рукоятью, что, в свою очередь, изменяет сопротивление датчика угла поворота 9. При работе с такой следящей системой ковш по отношению к рукояти не перемещают.
Вопросы, касающиеся технологии экскаваторных работ, в частности, проектирования схем забоев, приемов, обеспечивающих повышение производительности экскаваторов, изложены в методических указаниях /5/.
Дата добавления: 2015-07-26; просмотров: 214; Нарушение авторских прав

Мы поможем в написании ваших работ!