Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ВИБРОЗАЩИТА МАШИН
УРАВНОВЕШИВАНИЕ И БАЛАНСИРОВКА ВРАЩАЮЩИХСЯ МАСС.
7.1. Цели уравновешивания и балансировки.
При движении звеньев с переменными скоростями (т.е. с ускорением) возникают силы инерции и их моменты, которые принято также называть динамическими нагрузками. Возникновение их приводит к вибрации и шуму. Для их устранения при проектировании механизма звенья необходимо уравновесить. Это достигается соответствующим подбором масс и моментов инерции.
Для устранения малой неуравновешенности, возникающей после изготовления звеньев и их монтажа из-за несоблюдения размеров в процессе изготовления, неточности сборки, неоднородности материала, звенья балансируют.
7.2. Условия уравновешенности ротора
Деталь, вращающуюся в опорах, называют ротором. При вращении какой – либо i-той массы m на нее действует сила инерции, которую можно разложить на нормальную  и тангенциальную
и тангенциальную  составляющие (рис. 7.1).
составляющие (рис. 7.1).
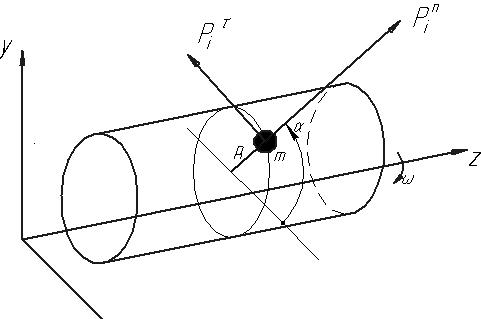
Рис. 7.1. Схема ротора
Величины этих сил можно вычислить по формулам
 (7.1)
(7.1)
Спроектируем эти силы на оси х, у, z и определим моменты этих сил относительно осей:
 (7.2)
(7.2)
Подставив (7.1) в (7.2) и просуммировав, получим (учитывая, что  ,
,  ):
):
 (7.3)
(7.3)
 (7.4)
(7.4)
Последнее уравнение в (7.4) можно исключить, так как момент  не создает дополнительной реакции в опорах ротора.
не создает дополнительной реакции в опорах ротора.
Силы  и
и  , моменты
, моменты  и
и  равны нулю в том случае, если координаты x и y массы m расположены на оси вращения z (то есть центр масс ротора неподвижен):
равны нулю в том случае, если координаты x и y массы m расположены на оси вращения z (то есть центр масс ротора неподвижен):
 (7.5)
(7.5)
Это есть условие статической уравновешенности ротора.
Моменты и равны нулю, если центробежные моменты инерции ротора равны нулю:
 (7.6)
(7.6)
Это есть условие динамической уравновешенности ротора.
Отсюда можно сделать следующие выводы:
- ротор статически уравновешен, если его центр тяжести расположен на оси вращения;
- ротор динамически уравновешен, если его ось вращения является главной центральной осью инерции.
Уравновешенность ротора можно охарактеризовать и силовыми параметрами. Он статически уравновешен, если главный вектор сил индукции  . Ротор динамически уравновешен, если главный вектор моментов сил инерции
. Ротор динамически уравновешен, если главный вектор моментов сил инерции  .
.
При проектировании роторов используют условия (7.5) и (7.6). При проверке уравновешенности изготовленных роторов используют условия и . Устранение остаточной неуравновешенности уже изготовленного ротора, возникшей по причинам неточности изготовления, монтажа, из-за неоднородности материала, из которого изготовлен ротор, называется балансировкой. Техника статической и динамической балансировки жестких роторов изложена в [6] и входит в содержание лабораторного практикума по дисциплине «Теория механизмов и машин».
7.3. Уравновешивание вращающихся масс.
7.3.1. Уравновешивание масс, находящихся в одной плоскости.
Положения отдельных неуравновешенных масс  , расположенных на роторе, можно охарактеризовать величинами радиус-векторов
, расположенных на роторе, можно охарактеризовать величинами радиус-векторов  относительно оси его вращения. Система вращающихся масс будет уравновешена, если главный вектор сил инерции, действующих на эти массы при их совместном вращении, равен нулю:
относительно оси его вращения. Система вращающихся масс будет уравновешена, если главный вектор сил инерции, действующих на эти массы при их совместном вращении, равен нулю:
 ,
,
где  - сила инерции, действующая на i-тую массу;
- сила инерции, действующая на i-тую массу;
 - сила инерции уравновешивающей массы
- сила инерции уравновешивающей массы  , расположенной на расстоянии
, расположенной на расстоянии  от оси вращения ротора.
от оси вращения ротора.
Сила инерции, действующая на i-тую массу, вращающуюся с постоянной скоростью  , равна
, равна  .
.
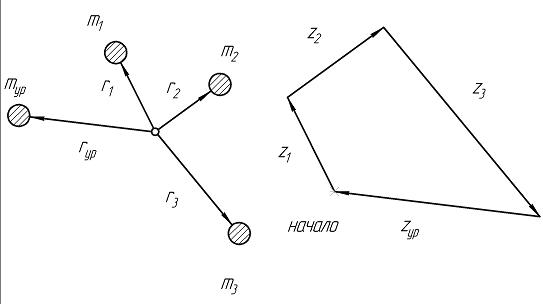
Рассмотрим систему, состоящую из трех неуравновешенных вращающихся масс m1, m2 и m3 (рис. 7.2).
а) б)
Рис.7.2. Система неуравновешенных масс (а) и план сил инерции (б)
Условием уравновешенности данной системы масс является следующее уравнение
 .
.
Так как , то это уравнение можно записать в следующем виде
 (7.7)
(7.7)
Так как  (мы рассматриваем вращающуюся систему масс), то
(мы рассматриваем вращающуюся систему масс), то
 (7.8)
(7.8)
Уравнение (7.8) можно решить аналитическим и графическим методами.
При аналитическом методе решения составляются уравнения проекций сил на координатные оси, из которых находят являющееся неизвестным последнее слагаемое.
Найдем  и
и  графическим методом, то есть построением векторного многоугольника (рис.7.2.б), являющегося графической интерпретацией векторного уравнения (7.8). Предварительно выбираем масштаб сил
графическим методом, то есть построением векторного многоугольника (рис.7.2.б), являющегося графической интерпретацией векторного уравнения (7.8). Предварительно выбираем масштаб сил
 .
.
Здесь z1 – длина вектора, изображающего силу  , берется в мм. Размерность масштаба
, берется в мм. Размерность масштаба  (если масса задана в кг, радиус – в м).
(если масса задана в кг, радиус – в м).
Переведем масштабом  другие известные слагаемые уравнения (7.8) в векторные отрезки:
другие известные слагаемые уравнения (7.8) в векторные отрезки:
Тогда векторное уравнение (7.8) запишется в следующем виде:
 (7.9)
(7.9)
Построив векторный силовой многоугольник (рис. 7.2б) в масштабе , из него определим длину вектора  . Выбрав из конструктивных соображений величину
. Выбрав из конструктивных соображений величину  , вычисляем уравновешивающую массу
, вычисляем уравновешивающую массу
 .
.
Поместив ее на роторе в направлении вектора на расстоянии от оси вращения, равном длине этого вектора, уравновесим ротор.
7.3.2. Уравновешивание вращающихся масс, расположенных произвольно
Последовательность уравновешивания масс, расположенных произвольно, рассмотрим на примере ротора с системой четырех неуравновешенных масс (рис. 7.3). Пусть известны величины неуравновешенных масс  и их положения относительно оси вращения ротора, обусловленные радиусами – векторами
и их положения относительно оси вращения ротора, обусловленные радиусами – векторами  и расстояниями
и расстояниями  относительно одной из произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
относительно одной из произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
При вращении ротора и неуравновешенных масс с постоянной угловой скоростью на каждую из масс действует сила инерции, равная
 .
.
Так как угловая скорость в рассматриваемом здесь частном случае является величиной постоянной, то угловое ускорение отсутствует (ε = 0) и тангенциальная составляющая силы инерции равна нулю.
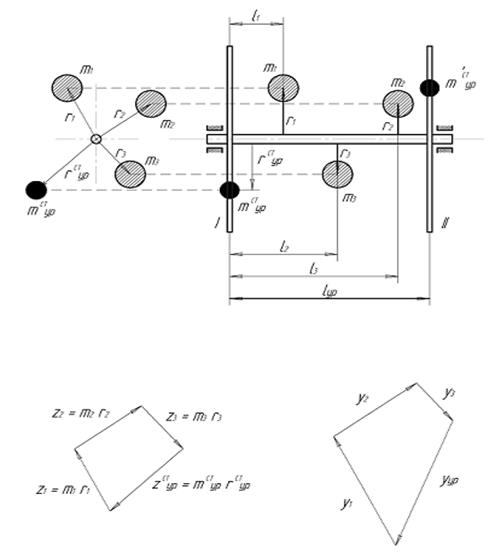
Рис. 7.4. Уравновешивание масс, расположенных произвольно
Выбираем плоскости приведения I и II (рис. 7.4), в которых будем располагать уравновешивающие массы.
Задача заключается в том, что необходимо уравновесить массы динамически.
Сначала проводим статическое уравновешивание в плоскости I. Его последовательность описана в предыдущем параграфе.
 ;
;  (7.10)
(7.10)
 (7.11)
(7.11)
Построив векторный многоугольник, используя (7.11), графически найдем  .
.
Уравновесим действие инерционных моментов, т.е. выполним условие . Для этого запишем уравнение:
;  (7.12)
(7.12)
т.к. , то из уравнения (7.12) следует, что
 (7.13)
(7.13)
Решая графически векторное уравнение (7.13), находим  .
.
Предварительно выбираем масштаб
 ,
,
Тогда уравнение (7.13) запишется в виде:
 (7.14)
(7.14)
При этом принимаем, что векторы моментов  повернуты на
повернуты на  и совпадают с направлением
и совпадают с направлением  .
.
 (7.15)
(7.15)
Находим из (7.15) величину  , задавшись
, задавшись  , или наоборот. Здесь
, или наоборот. Здесь  равна расстоянию между плоскостями приведения I и II.
равна расстоянию между плоскостями приведения I и II.
Проводя от оси вращения ротора линию, параллельную  , откладываем на ней с противоположных сторон
, откладываем на ней с противоположных сторон  и на концах этих векторов устанавливаем две уравновешивающие массы
и на концах этих векторов устанавливаем две уравновешивающие массы  . Причем одна из них будет расположена в плоскости I, другая в плоскости II. Массы
. Причем одна из них будет расположена в плоскости I, другая в плоскости II. Массы  и в плоскости I можно объединить в одну массу.
и в плоскости I можно объединить в одну массу.
7.4. Балансировка вращающихся масс (роторов).
Уравновешивание роторов или систем масс, рассмотренное выше, используется при проектировании механизмов.
В уже изготовленных роторах встречаются, как было сказано выше, неоднородности материала, возникают неточности изготовления и сборки, в результате чего возникает остаточная неуравновешенность. Ее нужно устранять балансировкой.
Различают:
- статическую балансировку, которую производят; как правило, для достаточно плоских роторов типа дисков, колес, маховиков, шкивов. Ротор при этом устанавливают в опорах с малым трением (например на призмах) и путем добавления масс или высверливания добиваются безразличного положения балансируемого ротора на опорах.
- динамическую балансировку, которую выполняют; как правило, для роторов, имеющих значительную длину (валы, широкие колеса, шкивы и т.д.), на специальных станках /6/.
7.5. Уравновешивание механизмов
Целью уравновешивания механизмов является устранение переменных во времени и пространстве воздействий стойки, станины механизма на опору, фундамент, вызывающих колебания фундамента и здания, а также уменьшение вибрации.
Условия уравновешенности механизма
Условия уравновешенности механизмов в общем виде можно охарактеризовать следующими уравнениями
 (7.16)
(7.16)
 , (7.17)
, (7.17)
где  и
и  - главный вектор сил и главный момент сил давления станины механизма на фундамент, опору,
- главный вектор сил и главный момент сил давления станины механизма на фундамент, опору,
 и
и  - главный вектор сил и главный момент всех других сил, внешних по отношению к механизму,
- главный вектор сил и главный момент всех других сил, внешних по отношению к механизму,
 и
и  - главный вектор сил инерции и главный момент сил инерции звеньев механизма.
- главный вектор сил инерции и главный момент сил инерции звеньев механизма.
С достаточной для практики точностью часто ограничиваются условием:
 (7.18)
(7.18)
 (7.19)
(7.19)
Это можно достичь следующими способами:
1) установкой противовесов на подвижных звеньях;
2) рациональным размещением центров масс звеньев механизма при его проектировании.
Статическое уравновешивание плоского механизма с помощью противовесов
Часто ограничиваются лишь статическим уравновешиванием механизма и его звеньев, т.е. выполнением условия (7.18):
Это условие соответствует постоянству положения центров масс звеньев относительно стойки (т.е. центр их масс должен быть неподвижен). Так как  ;
;  , то необходимо обеспечить условие
, то необходимо обеспечить условие  , т.е. ускорение центра тяжести должно отсутствовать.
, т.е. ускорение центра тяжести должно отсутствовать.
Рассмотрим последовательность уравновешивания на примере механизма шарнирного четырехзвенника (рис. 7.5).
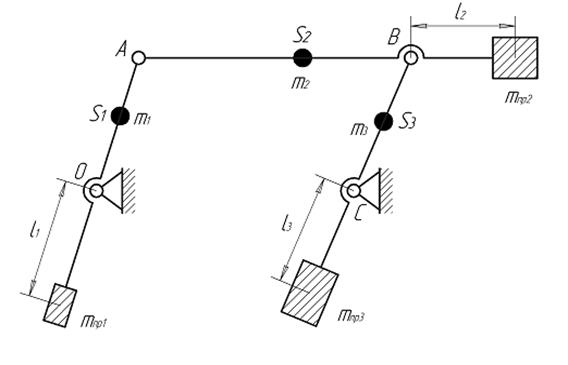
Рис. 7.5. Уравновешивание шарнирного четырехзвенника
Сначала уравновесим звено 1, записав условие равенства дебалансов собственной массы m1 неуравновешенного звена и уравновешивающей массы mпр.1
 .
.
Задаваясь длиной l1, находим уравновешивающую массу для этого звена
 .
.
Установив уравновешивающую массу на звено, мы тем самым совместим центр масс звена с осью его вращения О.
Затем уравновешиваем звено 2, записав условие
 .
.
Задаваясь длиной l2, находим уравновешивающую массу  .
.
И, наконец, проводим уравновешивание звена 3, записав условие
 .
.
Задаваясь длиной l3, находим  .
.
Здесь  .
.
Полное уравновешивание механизма в ряде случаев бывает провести очень сложно, поэтому ограничиваются частичным уравновешиванием.
7.6. Виброзащита машин
Колебания (вибрации) в машине, как правило, бывают нежелательными, так как из-за возникающих при этом дополнительных динамических нагрузок снижаются надежность деталей, подшипников и других узлов, возникает шум, вредно влияющий на человека, может нарушиться выполнение технологических процессов в рамках установленных параметров.
Если не удается уравновесить и сбалансировать отдельные звенья и механизм в целом, то используют виброзащиту механизма от возникающих при его работе переменных динамических нагрузок.
Основными способами снижения вибрации механизма являются:
- применение демпферов (устройств, предназначенных для увеличения сил сопротивлению колебаниям, зависящих от амплитуд и скорости колебаний); однако этот способ не всегда эффективен и не приводит к желаемым результатам;
- применение виброзащитных систем, гасящих динамические воздействия на машину путем воздействия дополнительными динамическими нагрузками.
В соответствии с этим существуют два основных способа виброзащиты: виброгашение ивиброизоляция.
Виброгашение достигается тем, что к машине присоединяются дополнительные колебательные системы – динамические виброгасители (рис. 7.6).
В общем виде динамический виброгаситель состоит из виброзащищаемого объекта 1, обладающего массой m1 и принудительно колеблющейся массы 2 величиной m2, соединенных упругими связями (пружинами): между собой – с жесткостью С2 , между защищаемой массой и рамой машины или фундаментом – с жесткостью С1.
Рис. 7.6. Принципиальная схема динамического виброгасителя.
Как правило  <
<  . Соотношения и ,
. Соотношения и ,  и
и  подбираются такими, чтобы собственная частота колебаний виброгасителя была равна частоте вынуждающей внешней силы
подбираются такими, чтобы собственная частота колебаний виброгасителя была равна частоте вынуждающей внешней силы  , где р – частота. При этом виброгаситель должен быть настроен на частоту вынуждающей внешней силы.
, где р – частота. При этом виброгаситель должен быть настроен на частоту вынуждающей внешней силы.
Закон гармонических колебаний имеет вид  . При этом период колебания
. При этом период колебания  , частота колебаний
, частота колебаний  , где начальная фаза
, где начальная фаза  , круговая частота
, круговая частота  .
.
На тело массой m, колеблющееся по гармоническому закону, пусть действуют две силы:
- восстанавливающая со стороны пружины
 ,
,
- возмущающая сила (сила инерции, например)
или  .
.
Так как система находится в равновесии, то  , или
, или
 (7.20)
(7.20)
Здесь круговая (угловая) частота свободных гармонических колебаний системы
 .
.
При действии на массу внешней возникающей силы, описываемой законом  , уравнение (6.20) будет иметь вид
, уравнение (6.20) будет иметь вид
 .
.
Уравнение движения двухмассовой системы (при возмущающей силе, действующей на массу , и равной ) имеет вид
 ,
,
где  и
и  - координаты, отсчитываемые от положения статического равновесия;
- координаты, отсчитываемые от положения статического равновесия;
 и
и  - коэффициенты жесткости пружины.
- коэффициенты жесткости пружины.
Для виброгашения массы используют явление антирезонанса,заставляя колебаться в противофазе к защищаемой массе. Для этого определяют величины и из условия  .
.
Недостатком способа является то, что виброгаситель действует только при неизменной частоте колебаний защищаемого объекта. Изменение его частоты резко увеличивает вибрацию и требует новой настройки виброгасителя.
Чувствительность виброгасителя к изменению частоты защищаемого объекта будет не так велика, если виброизоляторы обладают значительным трением путем введения в систему демпферов (амортизаторов).
Виброизолятор состоит из упругого элемента и амортизатора (рис. 7.7.)
Рис. 6.7. Принципиальная схема виброизолятора.
Виброизолятор имеет коэффициент демпфирования  .
.
Уравнение движения колеблющейся системы имеет вид:
 , (7.21)
, (7.21)
где Q – обобщенная реакция амортизатора.
Решая уравнение (7.21) движения системы, находят величину Q, а по ней подбирают амортизатор с нужной характеристикой.
| <== предыдущая страница | | | следующая страница ==> |
| Виброзащита машин | | | ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ ТЕЛА |
Дата добавления: 2015-07-26; просмотров: 345; Нарушение авторских прав

Мы поможем в написании ваших работ!