Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Моделирование процесса функционирования агрегата
Процесс функционирования агрегата состоит из скачков состояния в моменты поступления входных сигналов и выдачи выходных сигналов и изменений состояния между этими моментами.
Цель моделирования функционирования – получение характеристик, определяемых состоянием моделируемой системы. Для этого необходимо фиксировать в процессе моделирования достаточно полную информацию о состоянии системы в соответствующие моменты модельного времени.
Применительно к агрегату это означает, что необходимо получать значения состояний z (t) для некоторых моментов времени интервала исследований (0, Т). Вид оператора Н, решающего эту задачу, зависит от того, поступают (V) или не поступают (U) входные и управляющие сигналы в течение рассматриваемого интервала времени (t0, t).
В основе построения моделирующего алгоритма лежат моменты поступления входных и управляющих сигналов: моделирование рассматривается как последовательная цепь переходов из одного особого состояния агрегата в другое (к особому состоянию условно причисляется также и z (0)).
Вид моделирующего алгоритма в значительной степени определяется тем, известны ли заранее моменты поступления входных и управляющих сигналов и вообще моменты последующих особых состояний.
В связи с этим может быть рассмотрено два случая моделирования процесса функционирования.
1. Законы поступления входных и управляющих сигналов агрегата заданы и описываются как воздействия внешней среды.
Сигналы могут задаваться генерированием случайных чисел. Если сигналы поступают от нескольких источников, их необходимо расположить в единую последовательность во времени.
Вводятся следующие группы операторов:
- формирование моментов поступления входных и управляющих сигналов и определения момента поступления ближайшего сигнала;
- моделирование приемов входных и управляющих сигналов и особых состояний агрегата;
- моделирования процесса функционирования агрегата в моменты времени между последовательными моментами поступления внешнего сигнала, определение моментов выдачи выходных сигналов.
2. Законы поступления входных и управляющих сигналов агрегата не заданы – они вырабатываются в процессе моделирования как выходные сигналы других агрегатов.
В этом случае в моделирующем алгоритме должны быть предусмотрены процедуры проверки факта поступления внешних сигналов за некоторый интервал модельного времени (шаг моделирования), сортировки поступающих сигналов – построения (х, g)-сообщения.
Моделирование агрегативных систем
Агрегативные системы (А-системы) - класс сложных систем, обладающий следующим свойством: существует такое (в общем случае неоднозначное) расчленение системы на элементы, при котором каждый полученный элемент представляет собой агрегат. Передача информации между агрегатами в А-системе происходит мгновенно и без искажений.
В А-системе не могут быть элементы-неагрегаты.
Пример возможной схемы агрегативной системы приведен на рисунке 4.2.
А-система состоит из агрегатов А1, А2, . . . Функционирование А-системы связано с переработкой информации.
Вся информация, циркулирующая в А-системе, делится на внешнюю (поступает извне от объектов, не являющихся элементами данной системы) и внутреннюю, вырабатываемую агрегатами самой системы.
Обмен информацией между А-системой и внешней средой происходит через агрегаты, называемые полюсами системы (входные, выходные, управляющие полюсы). Одни и те же агрегаты могут быть одновременно и входными и управляющими полюсами.
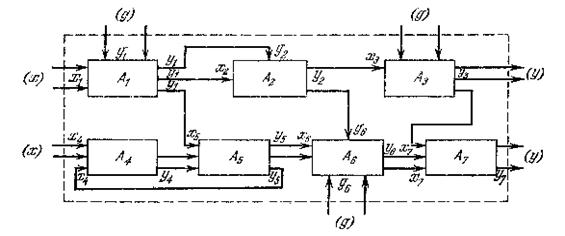
Возможная схема агрегативной системы.
На рисунке входные полюсы – агрегаты А1 и А4, управляющие – А1, А3, и А6, выходные – А3 и А7 . Агрегаты, не являющиеся полюсами – внутренние полюса (агрегаты А2 и А5). В частных случаях А-система может содержать не все полюса, крайний частный случай – один агрегат, в котором имеются все три полюса.
Свойства А-системы определяются не только свойствами составляющих агрегатов, но и структурой системы.
Связь между агрегатами (передача информации) может быть или непосредственная, или через другие агрегаты. Связь следования – выходная информация одного агрегата является входной для другого, связь подчинения - выходная информация одного агрегата является управляющей для другого.
А-система может быть представлена как комплекс - совокупность подсистем (тоже А-систем), если любой ее агрегат связан хотя бы с одним ее агрегатом. Объединение агрегатов тоже является агрегатом.
По аналогии с агрегатами, для комплексов также устанавливаются соотношения подчиненности и следования (непосредственного подчинения и непосредственного следования).
А-система называется многофазной, если комплексы следуют один за другим (связаны между собой), и многоканальной, если она состоит из несвязанных друг с другом комплексов (рисунки 3.4 и 3.5). Многофазная А-система является комплексом.
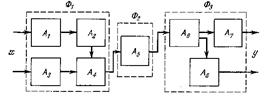
Возможная схема многофазной агрегативной системы
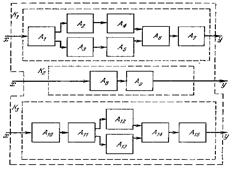
Возможная схема многоканальной агрегативной системы
В многоканальной А-системе обмен информацией между комплексами отсутствует. Многоканальная А-система не является комплексом.
А-система является иерархической, если она состоит из некоторого количества комплексов, подчиненных одному управляющему комплексу (с одним уровнем управления). Иерархическая система представляет собой комплекс. А-система является строго иерархической, если управляющий комплекс не подчинен ни одному из подчиненных ему комплексов. Если А-система состоит из нескольких иерархических А-систем, подчиненных одному управляющему комплексу, то такая система является иерархической с двумя уровнями управления. Могут быть образованы иерархические А-системы с произвольным числом уровней управления.
| <== предыдущая страница | | | следующая страница ==> |
| Формализация системы в виде агрегата | | | Модель сопряжения элементов |
Дата добавления: 2014-08-04; просмотров: 282; Нарушение авторских прав

Мы поможем в написании ваших работ!