Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Привести основные элементы схемы электропривода П.М., построенного на основе асинхронного электродвигателя с фазным ротором. Пояснить принцип и способы управления приводом
По курсу «Электропривод машин и установок».
Технологические режимы работы шахтных рудничных подъемных установок. Особенности нагрузочных диаграмм различных типов П.М. Основные требования к электроприводу П.М. и чем они обусловлены?
Работа подъемной установки характеризуется цикличностью, т. е. рядом сменяющихся циклов, следующих друг за другом. В свою очередь каждый цикл можно разбить на четыре основных периода: разгон, равномерное движение, замедление до полной остановки и пауза.
Таким образом, чтобы обеспечить требуемую производительность рудничного подъема, каждый цикл должен укладываться в определенное, наперед заданное время. Для этого необходимо выдерживать расчетные значения ускорения и замедления, максимальной скорости и продолжительности паузы, т. е. выдерживать принятую диаграмму скорости. Диаграмма скорости подъема— это зависимость скорости движения подъемных сосудов от времени.
При осуществлении подъемных операций скорость подъемного двигателя должна изменяться по определенному закону, характеризуемому диаграммой скорости.
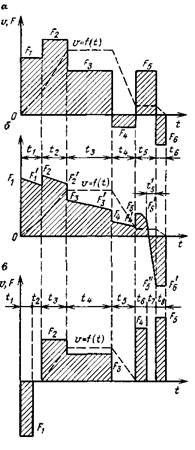 В зависимости от назначения и высоты подъема, вида и грузоподъемности подъемных сосудов, числа горизонтов и расстояния между ними диаграммы скорости могут быть трех-, пяти-, шести- и семипериодными (рис.).
В зависимости от назначения и высоты подъема, вида и грузоподъемности подъемных сосудов, числа горизонтов и расстояния между ними диаграммы скорости могут быть трех-, пяти-, шести- и семипериодными (рис.).
Наиболее простые трех-периодные диаграммы скорости целесообразно применять для клетевых подъемных установок с одноэтажными неопрокидными клетями при качающихся приемных площадках. Наиболее сложные шести- и семипериодные диаграммы скорости необходимы при грузовом подъеме с опрокидными скипами или клетями. Это объясняется необходимостью ограничения скорости движения подъемных сосудов в разгрузочных кривых. Поэтому период разгона разбивается на два участка с различными ускорениями. То же относится и к периоду замедления.
Рассмотрим шестипериодную диаграмму скорости, проектируемую обычно для скиповых подъёмов, оборудованных опрокидными скипами. На первом участке 0-1 (рис. б) осуществляется движение опускающегося подъемного сосуда в разгрузочных кривых. Причем ускорение на этом участке должно быть таким, чтобы скорость схода с кривых (точка1) не превышала для скипа 1,5 м/с, а для опрокидной клети — 2,5 м/с. На участке 1-2 после выхода подъемного сосуда из разгрузочных кривых машина движется с ускорением, которое ограничивается допустимыми напряжениями в узлах подъемной машины и определяет перегрузочную способность подъемного двигателя. Это ускорение по действующим нормам не должно превышать для вертикального грузового подъема 1,2 м/с2, также наклонного подъема (свыше 30°). Для многоканатных подъемных машин критерием величины ускорения служит исключение проскальзывания канатов по футеровке.
На участке 2—3 подъемные сосуды движутся с максимальной скоростью, а на участке 3—4 - с замедлением, пока скорость не достигнет величины, допустимой для входа в разгрузочные кривые (точка 4). Эта скорость также нормируется и не должна превышать 1,5 м/с.
Участок 4—5 соответствует движению скипа, опрокидной клети в разгрузочных кривых. Это
движение должно происходить со скоростью Vр.к = 0,6±0,3 м/с. Скорость дотягивания используется и в неопрокидных клетях для компенсации погрешности системы управления.
На участке 5—6 происходит процесс окончательного останова. Участок 6—7 соответствует паузе между двумя соседними периодами подъема. Пауза определяется конструкцией загрузочно-разгрузочных устройств при спуске-подъеме грузов, а при спуске-подъеме людей — нормативами времени на посадку людей в клеть. Эти нормативы следующие: время на посадку в клеть одноэтажную определяется из расчета 1 с на посадку одного человека плюс 10 с и плюс 25 с при посадке в двухэтажную клеть. Для скиповых подъемов определяющей для паузы является грузоподъемность скипа, т— до 6—8 с, 9—10 с, 12—12 с, 15—15 с, 20—30 с.
На рис. 2.2, а, б приведены диаграммы движущих усилий на ободе барабана (шкива трения) уравновешенной двухкопцевой подъемной установки с неопрокидными скипами при нормальной работе по выдаче груза и для статически неуравновешенной подъемной установки, оборудованной опрокидными клетями или скипами. Из диаграмм усилий следует, что установки с неопрокидными клетями или скипами имеют в период пуска меньшие усилия на валу двигателя по сравнению с опрокидными. Это объясняется тем, что при опрокидывании подъемного сосуда часть его веса приходится на разгрузочные кривые и этим создается еще большая неуравновешенность системы", нарастающая в конце дотягивания при разгрузке сосуда. Поэтому в момент опрокидывания необходимо создание значительного тормозного момента на валу подъемной машины. Там же представлены диаграммы скорости движения подъемных сосудов .
В статически неуравновешенных системах подъема неуравновешенность зависит от веса каната, а следовательно, от глубины подъема. Разница статических натяжений в верхних точках поднимающейся и опускающейся ветвей во время подъема непрерывно меняется, достигая наибольшего значения в начале и наименьшего — в конце подъема.
Максимальная скорость движения сосудов чисто грузовых подъемных установок вертикальных шахт и рудников не должна превышать значения Vmax = (0,4 - 0,5) √H, aр≠aз ≈1,2м/c2
где Vmax — максимальная скорость движения подъемных сосудов, м/с; Н — высота подъема, м.
Причем эта скорость должна быть не более 20 м/с. Vдотягивания=0,3м/c.
Максимальная частота вращения двигателя должна оставаться неизменной при изменении нагрузки на валу барабана подъемной машины, т. е. механическая характеристика двигателя должна быть жесткой.
Диаграмма усилий клетевой подъемной установки (рис. е) существенно отличается от диаграмм усилий скипового подъема. Объясняется это сложностью маневров при посадке клетей на посадочные кулаки или качающиеся площадки.
Для клетевого подъёма скорость должна быть не более 12 м/с, aр=aз ≤0,5м/c2
Наиболее полно диаграмма подъема выполняется при автоматическом управлении подъемной машиной. Это в первую очередь относится к скиповым и грузолюдским подъемным установкам при работе по выдаче груза.
Автоматизация в этом случае должна предусматривать:
§ систему регулирования хода подъемной машины, обеспечивающую программное выполнение требуемой диаграммы скорости, независимо от изменения нагрузки в заданных пределах, при этом отклонение скорости не должно отличаться более чем на 1-2 % без вмешательства обслуживающего персонала;
§ выбор зазоров в зубчатой передаче и плавное натяжение подъемного каната;
§ три режима работы: автоматический, ручной, ревизии.
§ перевод подъемной машины с одного вида управления на другой лишь при заторможенной машине и при установке всех рукояток управления на пульте в исходном (нулевом) положении;
§ аварийный останов подъема с мест загрузки и разгрузки скипов, а также с пульта управления машиниста подъема;
§ наложение предохранительного тормоза при аварийном отключении подъемного двигателя от сети;
§ контроль за исправностью отдельных элементов оборудования и защиту от нарушений нормального режима работы подъемной машины в соответствии с требованиями ПБ и технологическими требованиями;
§ максимальную скорость в пределах допустимой;
§ рывок≤2,5м/с3,tр=0,1-0,3 с;
§ tрег по скор=1,5-2 с;
Кроме вышеперечисленных требований, электропривод подъемной установки должен удовлетворять условиям возможно большего к. п. д. установки при регулировании скорости и минимального потребления электроэнергии в период пауз, так как мощность подъемного двигателя достигает нескольких тысяч киловатт, минимального веса и стоимости.
Привести основные элементы схемы электропривода П.М., построенного на основе асинхронного электродвигателя с фазным ротором. Пояснить принцип и способы управления приводом.
 Рассмотрим управление пуском асинхронного двигателя с фазным ротором. Наибольшее распространение нашло управление пуском асинхронного двигателя введением в цепь ротора -активного сопротивления. Диаграммы угловой скорости и момента двигателя в период пуска приведены на рис. Для выполнения такой диаграммы угловой скоростимашинист оператор полдъёмной машины должен через определёнеыё промежутки времени t1, t2, t3 и т. д. передвигать рукоятку командоаппарата, включая тем самым контакторные катушки, срабатывание которых вызывает шунтирование спупеней пускового резистора в роторной цепи. В связи с тем что машинисту-оператору трудно обеспечить необходимые выдержки времени на различных пусковых ступенях, производительность подъемной уста
Рассмотрим управление пуском асинхронного двигателя с фазным ротором. Наибольшее распространение нашло управление пуском асинхронного двигателя введением в цепь ротора -активного сопротивления. Диаграммы угловой скорости и момента двигателя в период пуска приведены на рис. Для выполнения такой диаграммы угловой скоростимашинист оператор полдъёмной машины должен через определёнеыё промежутки времени t1, t2, t3 и т. д. передвигать рукоятку командоаппарата, включая тем самым контакторные катушки, срабатывание которых вызывает шунтирование спупеней пускового резистора в роторной цепи. В связи с тем что машинисту-оператору трудно обеспечить необходимые выдержки времени на различных пусковых ступенях, производительность подъемной уста
новки будет всецело зависеть от его морально-психологических качеств. Для ликвидации этих недостатков применяют автоматическое управление подъемной машиной, что обеспечивает надежность и безопасность работы установки, повышает ее производительность на 10—15 % из-за строгого выполнения заданной диаграммы скорости и выдерживания пауз между циклами подъема.
Автоматизировать процесс пуска асинхронного двигателя, т. е. выводить пусковые резисторы последовательным замыканием роторных контакторов, можно в зависимости от различных параметров, характеризующих режим работы подъемной машины. Такие параметры: время, момент, скорость, ускорение, путь или комбинация этих параметров (например, время и ток).
 Наибольшее распространение на подъемных машинах нашли схемы автоматизации процесса пуска в зависимости от времени, тока с корректировкой по времени, времени с корректировкой по току, а также по ускорению.
Наибольшее распространение на подъемных машинах нашли схемы автоматизации процесса пуска в зависимости от времени, тока с корректировкой по времени, времени с корректировкой по току, а также по ускорению.
| <== предыдущая страница | | | следующая страница ==> |
| Билеты для ограниченных | | | Автоматическое управление пуском по времени с корректировкой по току |
Дата добавления: 2015-06-30; просмотров: 587; Нарушение авторских прав

Мы поможем в написании ваших работ!