Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Лекция 3. Тема. Общая постановка задачи оптимального автоматического управления
При заданных ограничениях на управляющие воздействия  , управляемые величины
, управляемые величины  , а также заданных уравнении объекта управления
, а также заданных уравнении объекта управления  , критерии опитмальности
, критерии опитмальности
J = J(x, и, t) и краевых условиях х(0) и х(Т) необходимо определить оптимальное управление u°(t) и оптимальную траекторию x°(t) или оптимальный алгоритм управления u°= и(х, t), обеспечивающие экстремум заданного критерия оптимальности.
Решение первой задачи приводит к разомкнутой САУ (рис. 1, а), решение второй - к замкнутой САУ (рис. 1, б), в которых АУУ - автоматическое управляющее устройство.
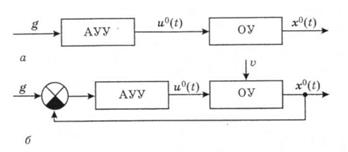
Рис. 1
Для решения задач оптимального управления применяются следующие методы оптимизации: Эйлера-Лагранжа, динамичес-кого программирования Р. Беллмана, нринцип максимума Л.С. ІІонтрягина.
| <== предыдущая страница | | | следующая страница ==> |
| В) уравнения регулятора, выражающее управляющее воздействие(выходную величину регулятора) через рассогласование и возмущение (его входные величины) | | | Задача на безусловный экстремум функционала |
Дата добавления: 2015-07-26; просмотров: 202; Нарушение авторских прав

Мы поможем в написании ваших работ!