Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Продольная балансировка
Целью продольной балансировки является выдерживание пилотом заданного угла тангажа и поступательной скорости вертолета. Вертолет считается сбалансированным, если он находится в состоянии равновесия под действием сил и моментов, действующих в продольной плоскости, перпендикулярной поперечной оси Oz .
На вертолет Ми-8 в полете действуют следующие продольные моменты (рис.3):
- момент несущего винта Мzн = Rн·ХТ эф.
ХТэф-эффективная центровка вертолета, представляющая собой расстояние между вектором полной аэродинамической силы НВ Rн и центром масс вертолета;
- инерционный момент на втулке за счет разноса горизонтальных шарниров (ГШ) Mzr.
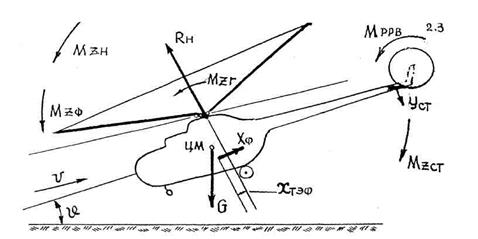 |
Суммарный момент от НВ и разноса ГШ является пикирующим на моторном режиме полета и кабрирующим на режиме самовращения НВ. Он зависит от центровки и балансировочного наклона конуса вращения НВ;
Рис. 3. Продольная балансировка вертолета.
- момент рулевого винта Mzр. Представляет собой реактивный момент РВ. Является кабрирующим на всех режимах полета и зависит oт углов установки лопастей РВ;
- момент фюзеляжа Mzф. Возникает за счет обдувки фюзеляжа встречным и индуктивным потоками. Суммарный момент фюзеляжа является кабрирующим на малых скоростях полета и при самовращении НВ, а на режимах моторного полета – пикирующим;
- момент стабилизатора MzсТ. На режимах полета с работающими двигателями является кабрирующим, так как при отрицательном угле установки подъемная сила стабилизатора УсТ направлена вниз. На режиме самовращения НВ момент MzсТ является пикирующим.
Условием продольного равновесия вертолета является равенство нулю алгебраической суммы продольных моментов, действующих относительно поперечной оси 0z:
 = -Mzн – Mzr
= -Mzн – Mzr  Mzф Mzст + Mzр =0. (I)
Mzф Mzст + Mzр =0. (I)
Из уравнения(I) следует, что вертолет находится в состоянии продольного равновесия при определенном значении момента от несущего винта Mzн. При изменении моментов Mzн и Mzr равновесие нарушается, и вертолет переходит на новый режим полета. Следовательно, для балансировки вертолета пилот должен с помощью РУ изменить
наклон конуcа вращения НB. При этом изменяется направление полной аэродинамической силы НВ Rн, эффективная центровка ХТэф, а значит и продольный момент от НВ.
В установившемся полете пилот стремится выдержать прямолинейное и равномерное движение вертолета, для чего РУ удерживается в балансировочном положении и незначительно отклоняется лишь для парирования возмущений.
 |
Отклонение конуса вращения НВ кинематически связано с органами управления - кольцом автомата перекоса и РУ и зависит от следующих факторов: скорости полета, центровки, режима работы двигателей.
| <== предыдущая страница | | | следующая страница ==> |
| I.4 Условия равновесия | | | Отклонений кольца АП от скорости по прибору |
Дата добавления: 2015-07-26; просмотров: 278; Нарушение авторских прав

Мы поможем в написании ваших работ!