Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Критерии управляемости вертолета
К таким показателям относятся: эффективность, чувствительность, мощность, запаздывание и усилия на рычагах управления.
Эффективность управления  определяется значением управляющего момента, действующего на вертолет, при отклонении рычага управления на единицу (градус или миллиметр):
определяется значением управляющего момента, действующего на вертолет, при отклонении рычага управления на единицу (градус или миллиметр):
=  ,
,
где  - отклонение РУ или педалей.
- отклонение РУ или педалей.
При отклонении РУ  на величину приращения
на величину приращения  вектор полной аэродинамической силы Rh отклоняется и возникает управляющий момент
вектор полной аэродинамической силы Rh отклоняется и возникает управляющий момент
МУпр = Rн·УТ·Sin .
Одновременно возникает инерционный момент на втулке за счет разноса ГШ:
Мгш = 2Fцδ·ℓгш · Sinδ. Здесь Sinδ  δ.
δ.
Таким образом, на вертолет действует суммарный момент МУпр, поворачивающий вертолет:
Mvnр=(RнУТ + 2Fцδ·ℓгш ) δ.
Формула показывает, что эффективность продольного (поперечного) управления пропорциональна величине тяги НВ, центровке по вертикали УТ , разносу ГШ и моменту инерции лопастей относительно ГШ. Эти же факторы повышают и устойчивость вертолета.
Лучшей эффективностью обладает вертолет с болеевысоким расположением НВ и большим
разносом ГШ.
Однако при увеличении шага НВ, скорости полете и углов атаки НВ эффективность растет только до тex пор, пока не наступает срыв потока на лопастях НВ в азимутальном секторе ψ= 270...360°. В этом случае отклонение РУ не приводит к завалу конуса вращения НВ, так как лопасти, охваченные срывом потока, не создают приростов подъемных сил в процессе циклического увеличения установочных углов. Следовательно, полная аэродинамическая сила НВ не вызовет изменения продольных сил и моментов, влияющих на скорость и угол тангажа. Полет вертолета будет сопровождаться потерей эффективности продольно-поперечного управления.
Чувствительность управления определяется установившейся угловой скоростью вертолета, достигаемой при отклонение рычагов управления (автомата перекоса или шага РВ) на 1°. Физический смысл этого понятия заключается в следующем. При отклонении РУ на единицу ее хода, например по тангажу, вертолет получает угловое ускорение ωz, равное отношению эффективности управления вертолета к его моменту инерции Jz :
ώz =  .
.
По мере увеличения угловой скорости будет увеличиваться и демпфирующий момент МД от НВ до тех пор, пока его значение не станет равно управляющему моменту, т.е.
МД = Мупрz при ωz = Const. В дальнейшем вертолет будет вращаться в продольной плоскости с постоянной угловой скоростью, так как сумма действующих на него моментов равна нулю. Поэтому, чем меньше эффективность ибольше демпфирование Мω, тем меньше установившаяся угловая скорость вращения вертолета при заданном отклонении РУ, т.e, чувствительность управления.
Вертолеты имеют болеевысокую чувствительность управления, чем самолеты, так как демпфирующий момент НВ существенно меньше аэродинамического демпфирования оперения и крыла самолета. Чувствительность поперечного управления вертолета обычно выше, чем продольного и путевого, а у легких вертолетов чувствительность больше, чем у тяжелых. Это объясняется различным соотношением характеристик эффективности управления и демпфирования.
Чувствительность управления также, как эффективность, имеет важное значение в
обеспечении безопасности полетов: при недостаточной чувствительности управления вертолет не успевает выйти из опасного режима полета, а чрезмерно высокая чувствительность управления приводит к раскачке вертолета при пилотировании.
При полетах с грузом на внешней подвеске эффективность и чувствительность вертолета существенно возрастают за счет смещения вниз центра масс системы
"вертолет-груз". В этом случае при отклонениях конуса вращения НВ плечо действия силы Rн относительно центра масс будет больше, чем при верхнем расположении центра масс. На вертолет будет действовать дополнительный момент, и угловая скорость вертолета возрастает. Следовательно, пилотирование требует плавных и соразмеренных действий пилота. Это предотвращает раскачку груза и самого вертолета.
Мощность управления определяется максимальным управляющим моментом, возникающим при отклонении рычага управления от его нейтрального положения до упора.
Для обеспечения безопасности полетов мощность управления должна быть достаточной для парирования действующих на вертолет возмущений и маневрирования на предельных режимах. Чем больше мощность управления, тем больше угловое ускорение вертолета, тем легче выводится вертолет из опасного режима полета. Если центровка вертолета соответствует предельной, то максимальный управляющий момент для парирования сильных внешних возмущений будет зависеть от имеющихся на вертолете запасов управления. Как было указано, минимально допустимые запасы управления вертолета Ми-8 должны составлять не менее 20%.
Запаздывание управления определяется временем  зап от начала отклонения рычага управления до начала изменения режима полета или положения вертолета в пространстве.
зап от начала отклонения рычага управления до начала изменения режима полета или положения вертолета в пространстве.
Для изменения наклона силы Rн , за счет которой создаются продольные и поперечные управляющие моменты, необходимо изменить наклон плоскости вращения концов лопастей НВ. Для этого установочные углы лопастей должны перейти к новому закону изменения по азимуту, т.е. после отклонения кольца автомата перекоса должен измениться закон маховых движений лопастей.
Однако переход на новые амплитуды маховых движений в соответствии с балансировочным положением кольца автомате перекоса происходит не сразу, а примерно спустя время одного оборота НВ (время циклического изменения шага лопастей). Для полного изменения закона маховых движений требуется еще дополнительное время, так как из-за большой инерционности и упругости лопастей конус вращения НВ стремится сохранить свое положение в пространстве. При переформировании конуса вращения образуются вихреобразование в струе НВ, также задерживающее наклон оси конуса вращения НВ.
Следовательно, нужное направление полной аэродинамической силы НВ устанавливается
с некоторым заметным отставанием от движения рычага, составляющим по времени 0,2..0,4 с. В процессе пилотирования это явление проявляется в том, что вертолет с запаздыванием "ходит за ручкой", и чтобы уменьшить время переходного процесса, пилот должен выполнятьдвойные упреждающие движения РЦШ. Для этого необходимо первоначально РУ отклонить на величину, большую, чем требуется для балансировки на новом режиме полета. Затем, не дожидаясь, пока вертолет займет нужное положение, плавно уменьшить отклонение РУ до значения, соответствующего балансировочному режиму (рис.28,а).
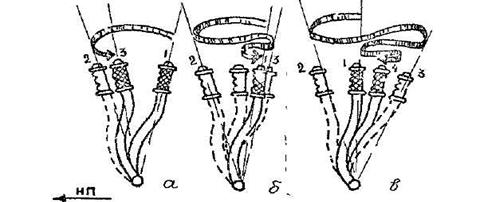 |
Рис. 28. Характер перемещения ручки циклического шага
Подобный характер отклонения рычага управления должен быть на устойчивом вертолете. Если вертолет малоустойчив или неустойчив, управление им значительно усложняется. Перемещение РЦШ при маневрировании на таком вертолете показано на рис.28.б,в. Например, для уменьшения угла тангажа необходимо сначала отклонив РЦШ от себя, а затем, не дожидаясь отклонения вертолета на требуемый угол, переместить ее на себя за исходное балансировочное положение на большую величину для прекращения быстро развивающегося возмущенного движения вертолета. Как только вертолет прекратит поворот, РУ следует возвратить за исходное положение, т.е. в заданное балансировочное положение, которое соответствует новому режиму полета.
При этом точная дача РУ невозможна ввиду запаздывания управления и неустойчивости вертолета по углу атаки. Вертолет может легко "проскочить" требуемый угол тангажа. Поэтому движения РУ должны выполняться пилотом "ступеньками" (толчками), представляющими собой серию двойных движений, необходимых для точного изменения угла
тангажа или его сохранения.
Время запаздывания управления зап соизмеримо с быстротой реакции пилота и существенно уменьшается при полете с автопилотом. Автопилот АП-З4Б значительно увеличивает скорость отклонения кольца автомата перекоса или шага РВ.
Запаздывание в путевом управлении значительно меньше, чем в продольном и поперечном, и практически не ощущается пилотом.
Нагрузки на рычагах управления вызваны действием шарнирных моментов лопастей НВ и воспринимаются гидроусилителями, включаемыми по необратимой схеме. Пилот прикладывает к РУ усилия, которые необходимы для преодоления сил трения в механических звеньях системы управления и в золотниковых устройствах гидроусилителей КАУ-ЗОБ, а также сил от пружин центровки и загрузки. Чем больше линейное перемещение РУ, тем больше градиент усилий пружинного механизма. При перемещении педалей пилотунеобходимо преодолевать усилия от шарнирных моментов лопастей РВ. Ввиду значительных усилий пилота управление осуществляется с помощью гидроусилителя РА-б0Б, включенного по необратимой схеме, а педали загружаются пружинами по типу РУ.
Сообразно с биологическими особенностями человека усилия на педалях больше, чем на РУ, a в системе продольного управления больше, чем поперечного. Включенные в систему управления электромагнитные муфты позволяют при необходимости практически мгновенно сиять усилия с РЦШ и педалей, т.e. выполняют роль автотриммеров. На участке системы управления от рычагов в пилотской кабине до гидроусилителей действуют лишь мускульные усилия пилота, преодолевающие трение в системе управления и усилия пружинных механизмов загрузки.
Градиенты нагрузок на рычагах, создаваемые пружинными механизмами, позволяют пилоту "чувствовать" вертолет в полете, управлять им не по величине отклонений рычагов, а по ощутимым нагрузкам на органах управления и поведению самого вертолета.
При нажатии кнопки "триммер" электромеханизмы триммирования почтимгновенно снимают усилия с ручки управления в любом ее положении. Пилотирование вертолета с нажатой кнопкой "триммер" практикуется на длительных установившихся режимах, что существенно облегчает пилотирование. Однако пользоваться кнопкой "триммер" на переходных режимах и при маневрировании не рекомендуется во избежание раскачки вертолета.
Эффективность управления вертолета Ми-8 значительно повышается при включении автопилота АП-34Б. Как было указано, при работе автопилота вертолет приобретает динамическую устойчивость за счет искусственного увеличения демпфирования. Поэтому автопилот, отклоняя с помощью гидроусилителей кольцо автомата перекоса и лопасти РВ, выполняет те двойные упреждающие действия, которые должен делать пилот.
При работе автопилота в режимеуправления отклонение органа управления происходит по двум сигналам: от пилота и автопилота, (рис.29). Пилот может вмешаться в управление, воздействуя на рычаг управления и одновременно задавая автопилоту новые параметры полета. Эффективность управления при пилотировании «вместе с автопилотом» значительно повышается. Это достигается с помощьюкомпенсационных датчиков. Вводимый в автопилот сигнал положения рычага управления (РУ или педалей) приводит к дополнительному (от автопилота) отклонению органа управления пропорционально величине хода рычага.
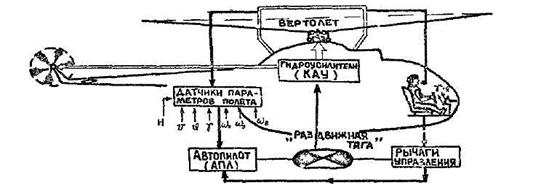
Рис.29. Включение автопилота в систему управления по дифференциальной схеме
Следовательно, работа автопилота АП-34Б облегчает процесс управления вертолетом, освобождает пилота от двойных упреждающих движений, повышает безопасность полета.
Выводы:
1. Управляемость является определяющим показателем эксплуатации вертолета.
2. Для оценки управляемости используется ряд показателей - критериев.
3. Данные расчетов и результаты летных испытаний показывают, что вертолет Ми-8 обладает высокой чувствительностью, эффективностью и мощностью управления, пружинные механизмы обеспечивают незначительные нагрузки на рычагах управления.
4. Необходимо учитыватьповышенное запаздывание в каналах продольно-поперечного
управления, а также повышенную чувствительность управления в полете с грузом на
внешней подвеске.
5. Вертолет Ми-8 при соблюдении установленных ограничений имеет достаточные
запасы управления. Основное влияние на запасы управления оказывают
поступательная скорость полета, режим работы силовой установки, центровка
вертолета. В целях сохранения нормальной управляемости вертолета Ми-8 на
экстремальных режимах полета необходимо иметь запасы по отклонению органов
управления не менее 20% их полного хода.
6. Эффективность управления вертолета Ми-8 значительно повышается при
использовании автопилота АП-34Б.
Контрольные вопросы
1. Что понимается под управляемостью вертолета ? В чем заключается связь управляемости с устойчивостью?
2. Назовите критерии управляемости, их основной смысл.
3. В чем состоит особенность управления вертолетом с выключенным автопилотом ?
4. Какую роль играет работа автопилота в процесое управления вертолетом ? Каковы возможности автопилота АП-34Б ?
5. Дайте оценку управляемости вертолета в зависимости от скорости полета, центровок, частоты вращения НВ, размещения загрузки (внутри кабины или на внешней подвеске
Использованная литература
1. Володко A.M. Основы аэродинамики и динамики полета вертолетов М.: Транспорт. I988 г.
2. Ромасевич В.Ф., Самойлов Г.А. Практическая аэродинамика вертолетов. М.: Воениздат, 1980.
3. Практическая аэродинамика вертолета Ми-8: Методические указания по изучению балансировки, устойчивости и управляемости. Омск: ОЛТУ ГА, 1986.
4. Руководство по летной эксплуатации вертолета Ми-8. М.; Воздушный транспорт, 1980
5. Схемы и графики по Практической аэродинамике вертолёта МИ-8.
«Омский летно-технический колледж гражданской авиации им.А.В.Ляпидевского»,
филиал Федерального государственного образовательного учреждения высшего профессионального образования «Ульяновское высшее авиационное училище ГА ( институт)»
| <== предыдущая страница | | | следующая страница ==> |
| Управляемостью вертолета называется его способность реагировать на управляющие воздействия пилота | | | основна |
Дата добавления: 2015-07-26; просмотров: 362; Нарушение авторских прав

Мы поможем в написании ваших работ!