Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЕ. Существуют три вида уравновешивания: статическое, динамическое и полное
Существуют три вида уравновешивания: статическое, динамическое и полное.
Статическое уравновешивание заключается в том, чтобы обеспечить равенство нулю главного вектора системы сил  , а главный момент при этом не равен нулю
, а главный момент при этом не равен нулю  . В этом случае центр масс звена лежит на оси вращения, а ось называется центральной.
. В этом случае центр масс звена лежит на оси вращения, а ось называется центральной.
При динамическом уравновешивании добиваются условий равенства нулю главного момента  , а главный вектор при этом не равен нулю
, а главный вектор при этом не равен нулю  .
.
В случае полного уравновешивания должны быть равны нулю и главный вектор и главный момент и . Ось вращения в этом случае является центральной и главной (момент инерции масс относительно главной оси имеет экстремальное значение).
При полном уравновешивании вращающегося звена давления на опоры не зависят от его угловой скорости, т.е. они остаются такими же, какими были при неподвижном звене.
Силы, возникающие при вращении звена, – центробежные силы инерции  , вызваны вращающимися массами, несимметрично расположенными относительно оси вращения:
, вызваны вращающимися массами, несимметрично расположенными относительно оси вращения:
 ,
,
где w – угловая скорость звена; mi; ri – несимметрично расположенные массы и их расстояния от оси вращения.
Из курса теоретической механики известно, что если главный вектор равен нулю, то сумма проекций всех сил на любую ось должна равняться нулю или многоугольник, составленный из векторов сил, должен быть замкнутым. Если равен нулю главный момент, то сумма моментов всех сил относительно произвольно выбранного центра приведения должна быть равна нулю, а многоугольник векторов-моментов должен быть замкнут. Эти выводы теоретической механики и используются в уравновешивании вращающегося звена.
В качестве неуравновешенного звена используется ось с пятью дисками, на втором, третьем и четвертом из которых устанавливаются три заданные массы m2, m3, m4, на заданных радиусах r2, r3, r4 под углами a2, a3, a4 относительно выбранной системы отсчета (рис.1). На первом и пятом дисках устанавливаются уравновешивающие массы m1 и m5 под вычисленными углами a1 и a5 на расстояниях r1 и r5, которые либо вычисляются (при использовании установки типа А), либо эти радиусы постоянны (в установке типа В). В последнем случае вычисляются массы m1 и m5, тогда как в первом случае ими задаются из числа имеющихся в наборе.
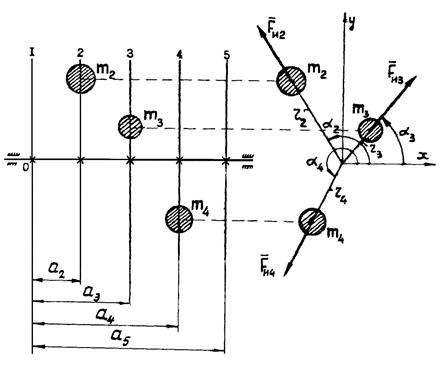
Рис.1. Схема установки
Расстояния между дисками а2, а3, а4, а5 известны.
Для определения квадранта, в котором находится угол, за начало отсчета принимают ось х (рис.1), а положительные значения углов откладывают против часовой стрелки.
В качестве центра приведения выбирают точку 0 – точку пересечения плоскости первого диска с осью вращения звена, что обусловлено удобством вычислений, т.к. все массы располагаются по одну сторону от плоскости первого диска, а это облегчает определение направлений векторов-моментов.
 Известно, что вектор-момент направлен перпендикулярно плоскости его действия. В нашем случае он перпендикулярен плоскости, в которой лежат ось вращения звена и вектор центробежной силы
Известно, что вектор-момент направлен перпендикулярно плоскости его действия. В нашем случае он перпендикулярен плоскости, в которой лежат ось вращения звена и вектор центробежной силы  инерции (рис.2). Для удобства определения направления уравновешивающего вектора-момента поворачивают все векторы-моменты на 90° так, чтобы они совпадали с векторами центробежных сил, что равносильно повороту осей координат и, естественно, на результатах не сказывается.
инерции (рис.2). Для удобства определения направления уравновешивающего вектора-момента поворачивают все векторы-моменты на 90° так, чтобы они совпадали с векторами центробежных сил, что равносильно повороту осей координат и, естественно, на результатах не сказывается.
Уравновешивание достигается путем установки на определенных расстояниях от оси вращения под определенными углами дополнительных масс, вращение которых вызывает силы инерции, направленные так, что выполняется указанное выше равновесие сил и моментов.
Уравновешивание удобно выполнять, добиваясь сначала равенства нулю главного момента, а затем главного вектора.
| <== предыдущая страница | | | следующая страница ==> |
| УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ЗВЕНЬЕВ | | | АНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ |
Дата добавления: 2015-07-26; просмотров: 237; Нарушение авторских прав

Мы поможем в написании ваших работ!