Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
К каноническому виду. Преобразование многомерных автоматических систем
|
Читайте также: |
Преобразование многомерных автоматических систем
Лекция 3
Наиболее общей формой описания автоматической системы является нормальная (или стандартная) форма, например
 . (3.1)
. (3.1)
В развернутом векторно-матричном виде описание (3.1) выглядит следующим образом

В скалярном виде описание автоматической системы (3.1) выглядит
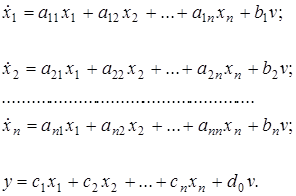
Условия полной управляемости и полной наблюдаемости системы (3.1) следующие
 ,
,  .
.
Структура системы (структурная математическая модель) представлена на рисунке 3.1
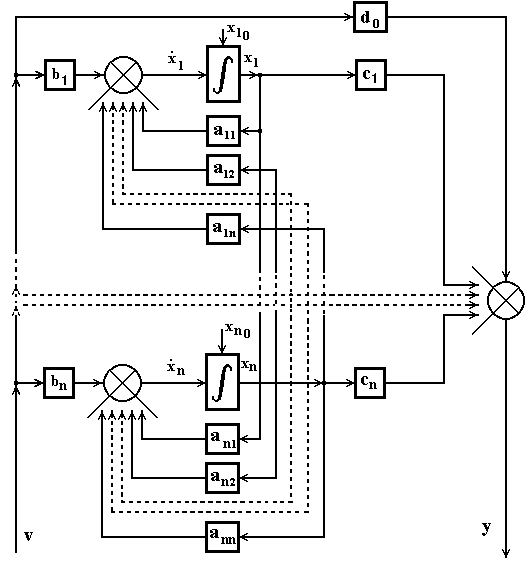
Рисунок 3.1 – Структурная математическая модель системы (3.1)
В тех случаях, когда собственные числа  матрицы состояния
матрицы состояния  вещественные и различные, система (3.1) может быть преобразована к каноническому виду
вещественные и различные, система (3.1) может быть преобразована к каноническому виду
 , (3.2)
, (3.2)
где  - диагональная матрица Жордана (Camille Jordan, 1838 - 1922).
- диагональная матрица Жордана (Camille Jordan, 1838 - 1922).
В развернутом векторно-матричном виде описание (3.2) выглядит следующим образом

В скалярном виде описание автоматической системы выглядит следующим образом

Если система (3.1) обладает свойством полной управляемости, то  .
.
Если система (3.1) обладает свойством полной управляемости, то  .
.
Структура системы (3.2) представлена на рисунке 3.2.

Рисунок 3.2 – Структурная математическая модель системы (3.2)
3.1. Метод преобразования с помощью матрицы Вандермонда. Часто система в стандартной форме задана матрицей состояния определенного вида – матрицей Фробениуса (Georg Frobenius, 1849 - 1917)
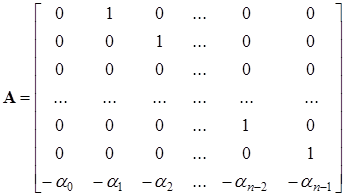 . (3.3)
. (3.3)
В этом случае столбцы матрицы  можно выбрать пропорционально столбцам матрицы Вандермонда (Alexandre Theophile Vandermonde, 1735 - 1796)
можно выбрать пропорционально столбцам матрицы Вандермонда (Alexandre Theophile Vandermonde, 1735 - 1796)
 , (3.4)
, (3.4)
где  - собственные числа матрицы ;
- собственные числа матрицы ;  - коэффициенты - любые вещественные числа (за исключением нуля).
- коэффициенты - любые вещественные числа (за исключением нуля).
Пример 3.1.1Допустим, система (3.1) с матрицей состояния (3.3) при  задана в следующем виде
задана в следующем виде
 , (3.5)
, (3.5)
В структурном виде система (3.5) представлена на рисунке 3.3
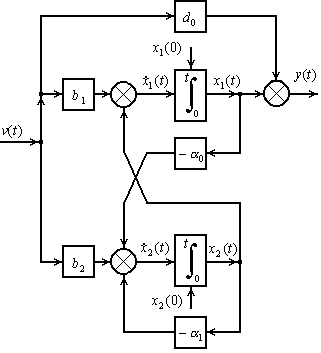
Рисунок 3.3 – Структура системы (3.5)
Система (3.5) всегда полностью наблюдаема. Для полной управляемости системы необходимо выполнение условия: 
 .
.
Поскольку матрица состояния системы соответствует матрице (3.3) применим преобразование системы к каноническому виду (3.2), основанное на использовании матрицы Вандермонда (3.4) при .
 ,
,  .
.
Допустим в (3.5)  ,
,  , тогда корнями характеристического уравнения
, тогда корнями характеристического уравнения  являются
являются  ,
,  .
.
Получим матрицу канонического преобразования
 ,
,  .
.
В результате получим систему вида (3.2)
 , (3.6)
, (3.6)
где элементы матриц  ,
, 
 определяются в соответствии с преобразованием, как
определяются в соответствии с преобразованием, как
 ,
,
 .
.
Структура преобразованной системы (3.6) представлена на рисунке 3.4.
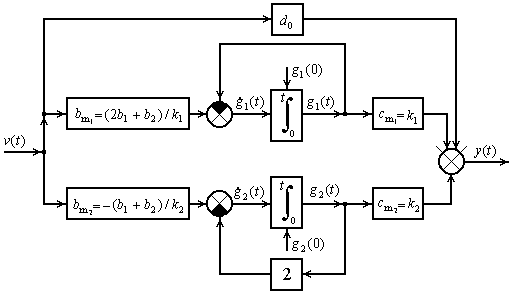
Рисунок 3.4 – Структура преобразованной системы (3.6)
Если система обладает свойством полной управляемости, то  и
и  , или:
, или:
 и
и  .
.
Поскольку система всегда обладает свойством полной наблюдаемости,  и
и  .
.
Пример 3.1.2 Допустим, в системе (3.5) , ,  ,
,  ,
,  .
.
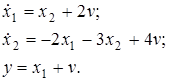
 , (3.7)
, (3.7)
Скалярный вид записи системы:
Структурный вид записи:
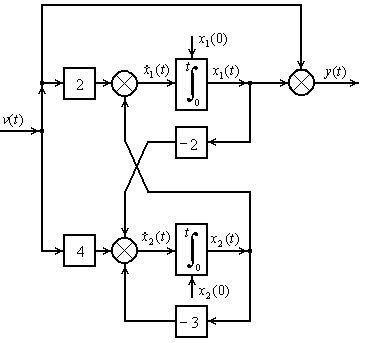
Рисунок 3.5 – Структура системы (3.7)
Система обладает свойством полной наблюдаемости. Система не обладает свойством полной управляемости:
 .
.
Преобразованием  ,
,  приведем систему (3.7) к каноническому виду
приведем систему (3.7) к каноническому виду
 . (3.8)
. (3.8)
Для определения собственных чисел  ,
,  матрицы
матрицы  определим характеристический полином
определим характеристический полином
 . (3.9)
. (3.9)
Собственные числа матрицы состояния (или корни характеристического полинома (3.9)): , .
Матрицу канонического преобразования получим на основе матрицы Вандермонда
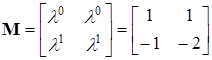 ,
, 
при этом
 ;
;  ,
,
 ;
;  ,
,
 ,
,
Признаком того, что система не обладает свойством полной управляемости является  .
.
 .
.
Признаком того, что система обладает свойством полной наблюдаемости является:  и
и  .
.
Структура преобразованной системы представлена на рисунке 3.6.
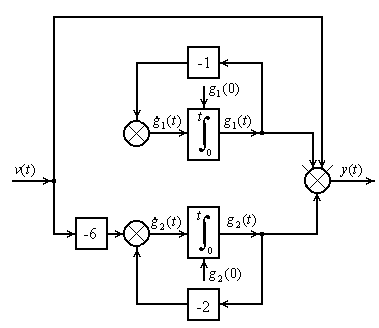
Рисунок 3.6 – Структура преобразованной системы (3.8)
| <== предыдущая страница | | | следующая страница ==> |
| Программа Лекции | | | Донаучный этап» развития менеджмента |
Дата добавления: 2014-03-11; просмотров: 473; Нарушение авторских прав

Мы поможем в написании ваших работ!