Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Управление технической системой
Любая ТС в определенных условиях характеризуется относительно стабильной организацией и явно выраженной целевой функцией, которая реализуется посредством целенаправленного воздействия на систему, т. е. с помощью управления. Соответственно управлением называют процесс организации целенаправленного воздействия на систему как объект управления, в результате которого система переходит в требуемое состояние. В общем виде схема управления объектом приведена на рисунке ниже.
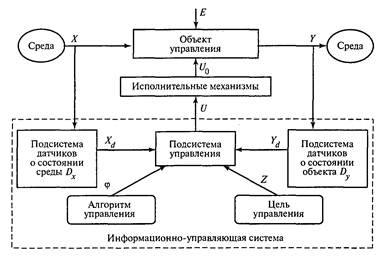
В основе процесса управления лежит информация о состоянии среды Х, объекта Y и цели управления I. Для целенаправленного функционирования подсистемы управления необходим алгоритм управления в виде совокупности однозначно интерпретируемых правил реализации поставленной цели Z в данной ситуации.
Информация I = <Хd, Yd> о состоянии среды и объекта поступает в подсистему управления через подсистемы датчиков Dx и Dу, которые можно назвать подсистемами сбора информации. При ограниченности ресурсов, обычно выделяемых на управление, информация I всегда является неполной, т. е. на объект может оказываться воздействие, не учитываемое подсистемой сбора информации. Поэтому на рисунке показано ненаблюдаемое возмущение Е, под которым подразумеваются все внешние и внутренние процессы, влияющие на состояние Y объекта, но не воспринимаемые подсистемами сбора информации в силу их функциональной неполноты.
Располагая информацией I = <Хd, Yd> и алгоритмом управления для достижения цели I, подсистема управления вырабатывает воздействие U = φ(I, Z), которое реализуется исполнительными механизмами.
В общем случае исполнительные механизмы выполняют команду U с некоторой задержкой и поэтому возможно U0 ≠ U , где U0 - состояние управляемого входа объекта. Это необходимо учитывать при разработке
информационно-управляющей системы объекта, поскольку его состояние Y определяется тремя факторами, т. е. Y = F0(X, Е, U0), где F0 - оператор работы объекта управления. Здесь под информационно-управляющей системой объекта понимается совокупность средств реализации алгоритмов управления, включаемых в состав подсистем сбора информации и управления и объединяемых для достижения заданных целей управления.
Таким образом, основными факторами, присущими любой системе управления, являются:
- цель управления Z;
- информация I о состоянии объекта управления и его окружения;
- алгоритм управления φ;
- воздействие U0 на объект управления.
Важно отметить, что управление оказывается невозможным при исключении из этого перечня хотя бы одного фактора и оно считается качественным, если наиболее полное достижение поставленной цели обеспечивается в заданных условиях при наиболее эффективном распределении ограниченных ресурсов управления. Для достижения эффективного управления необходимо определить количественную оценку полноты достижения целей управления. Эту оценку принято называть критерием эффективности (качества) управления. Конкретные критерии эффективности выбираются в зависимости от характера решаемой задачи.
1.3. Определение и обобщенная схема электромеханической системы
Все сказанное выше в полной мере справедливо и для ЭМС. Особенности ЭМС связаны с конкретным их назначением. С учетом ранее данного определения сложных технических систем можно рассматривать ЭМС как совокупность взаимодействующих элементов, осуществляющих электромеханическое преобразование энергии при заданном качестве этого преобразования.
По функциональному признаку ЭМС разделяются на следующие группы:
1. Источники электропитания (генераторные установки), т. е. системы, преобразующие механическую энергию в электрическую.
2. Системы электропривода, в которых происходит преобразование электрической энергии в механическую энергию движения рабочих органов различных механизмов.
3. Двигатель-генераторные системы, осуществляющие преобразование электрической энергии в механическую и механической энергии в электрическую. При этом эти два преобразования могут производиться одновременно, как это делается в электромеханических источниках вторичного электропитания, в которых одна электрическая машина является приводным двигателем, а вторая — генератором, или поочередно, как в стартерах-генераторах.
Следует отметить, что основное обратимое преобразование энергии механической в электрическую не исчерпывает всего многообразия преобразований энергии в ЭМС. Так, функциональными задачами этих систем могут быть преобразования электрической энергии одного вида в электрическую энергию другого вида соответственно механической энергии одного вида в механическую энергию другого вида, механической энергии в электрическую энергию особого вида и качества (например, получение электрического сигнала, пропорционального углу поворота или тригонометрическим функциям этого угла).
В зависимости от назначения, условий работы и предъявляемых требований существует большое число различных видов и типов ЭМС, все многообразие которых можно представить некоторой обобщенной схемой. Одна такая схема позволяет реализовать как частный случай любую конкретную схему ЭМС, а в некоторых случаях и прогнозировать появление новых схем. Впервые идею о возможности представления множества различных ТС и устройств в виде обобщенных схем высказал В. Т. Морозовский, один из выдающихся отечественных ученых в области авиационной электротехники.
На рисунке ниже представлен один из возможных вариантов обобщенной функциональной схемы ЭМС. Она представляет собой совокупность элементов, взаимодействие которых осуществляется с помощью коммутируемых связей, при этом ключи располагаются последовательно или параллельно элементам. Каждой совокупности состояний этих ключей соответствует конкретная схема ЭМС. Число сочетаний положений всех ключей характеризует множество возможных схем ЭМС.
Основным элементом каждой схемы, естественно, является ЭМП, под которым будем понимать электрическую машину, работающую в двигательном или генераторном режиме.
Возможность работы ЭМП в том или ином режиме на обобщенной схеме показана направлениями соответствующих стрелок, соединяющих элементы.
К ЭМП должна подводиться механическая (генераторный режим) или электрическая (двигательный режим) энергия. Для последнего случая в обобщенной схеме предусмотрен источник электрической энергии (ИЭЭ) с возможностью подключения аккумулятора (накопителя) электрической энергии (АЭЭ), если ИЭЭ имеет ограничения по мощности и по времени работы.
В генераторном режиме ЭМП требуется механическая энергия, для получения которой может быть использован любой другой вид энергии. На обобщенной схеме это показано в виде возможности подключения источника (ИЭ) и аккумулятора (АЭ) энергии через соответствующий преобразователь в механическую энергию (ПЭМ). В качестве источника энергии могут быть использованы, например движение воздуха, воды, взрыв, сжатые газы, механические пружины, горючие вещества и т. п.
При работе ЭМП практически всегда требуется обеспечивать соответствующие уровень и качество подводимой к нему или отводимой от него электрической или механической энергии. Для этого в обобщенную схему вводятся преобразователь механического движения, скорости и момента (ПДСМ) и преобразователь электрической энергии (ПЭЗ).
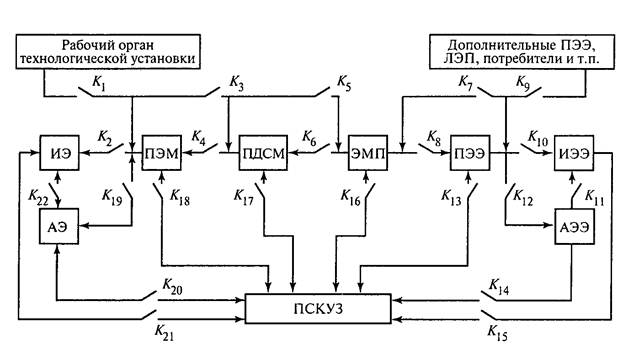
ЭМП– электромеханический преобразователь; ПЭЭ – преобразователь электрической энергии; ИЭЭ – источник электрической энергии; АЭЭ – аккумулятор электрической энергии; ПДСМ – преобразователь движения, скорости и момента; ПЭМ – преобразователь какой-либо энергии в механическую; ИЭ - источник энергии; АЭ – аккумулятор энергии; ПСКУЗ – подсистема контроля, управления и защиты; К1 – К22 – коммутирующие ключи.
Обязательным атрибутом любой ЭМС является подсистема контроля, управления и защиты (ПСКУЗ), назначение которой — сбор информации о работе системы, ее элементов и параметрах окружающей среды. На основе этой информации вырабатываются управляющие сигналы, с помощью которых обеспечивается заданное качество функционирования системы, реализуется контроль за работой всех ее элементов и при необходимости осуществляется их защита. Эта подсистема включает в себя совокупность датчиков, задающих, сравнивающих и исполнительных устройств, а также средств индикации и защиты. В составе подсистемы могут находиться как простейшие релейные элементы, осуществляющие включение и отключение компонентов ЭМС, так и микроконтроллеры или управляющие ЭВМ, решающие задачи эффективного управления, контроля качества работы системы, диагностики и прогнозирования работоспособности ее компонентов.
В конкретных ЭМС ряд элементов обобщенной схемы могут отсутствовать или функционально и конструктивно совмещаться с другими элементами.
В соответствии с ранее рассмотренным способом морфологического описания технических систем в составе ЭМС можно выделить энергетические и информационные элементы (каналы), а также различные прямые и обратные связи, которые реализуются определенными коммутациями ключей. При этом в энергетический канал ЭМС входят все элементы обобщенной схемы за исключением подсистемы контроля, управления и защиты, которая соответственно выполняет функции информационно-управляющего канала.
| <== предыдущая страница | | | следующая страница ==> |
| Лекция №3. ВВЕДЕНИЕ в ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ | | | Классификация электромеханических систем |
Дата добавления: 2014-07-19; просмотров: 473; Нарушение авторских прав

Мы поможем в написании ваших работ!