Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Доплеровские лаги
2.5.2.1. Принцип действия доплеровского лага
Эффект Доплера заключается в следующем: если источник и приемник звука перемещаются друг относительно друга, то частота принимаемого сигнала отличается от частоты излучаемого сигнала и зависит от скорости этого перемещения.
Принцип действия гидроакустического доплеровского лага основан на определении скорости судна по доплеровским сдвигам частот акустических сигналов, излучённых с борта судна, рассеянных морским дном (или сравнительно удалённым от днища слоем воды) и принятых антенной системой лага.
На судне расположены излучатель и приёмник акустических колебаний. Излучатель формирует узкий луч, направленный под углом  к горизонту (рис. 2.6).
к горизонту (рис. 2.6).
При движении судна длина волны излученного сигнала, приходящего к условному приемнику — морскому дну изменится и будет равна
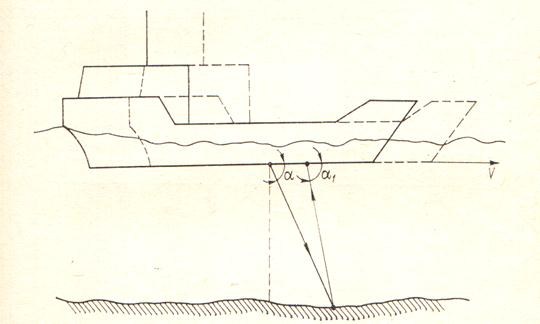
Рис. 2.6
где  — длина волны излучённого сигнала;
— длина волны излучённого сигнала;
V — скорость судна;
С — скорость звука в воде.
Соответственно частота этого сигнала
 (2.19)
(2.19)
Высокочастотное излучение (f от сотен кГц до единиц МГц), используемое в доплеровских лагах, отражаясь от морского дна (совокупности большого числа элементарных отражателей) рассеивается по всем направлениям, в том числе и по направлению к установленному на судне приемнику.
За время распространения излучённого сигнала до грунта и обратно судно сместится (показано на рис. 2.6 штриховой линией) от положения, в котором происходило излучение сигнала, приём рассеянного излучения будет осуществляться уже под углом  .
.
Очевидно, что вследствие эффекта Доплера частота принятых на борту судна колебаний будет отличаться от частоты f1:
 (2.20)
(2.20)
Если предположить, что скорость судна мала и  , то , после ряда математических преобразований можно получить выражение для доплеровского сдвига частоты:
, то , после ряда математических преобразований можно получить выражение для доплеровского сдвига частоты:
fд = fпр — f0 =
 (2.21)
(2.21)
Во всех практических случаях при использовании радиодоплеровских лагов V << C и членами второго порядка малости в формуле 2.21 можно пренебречь.
Как видим, для однолучевой доплеровской гидроакустической системы зависимость доплеровского сдвига частоты от скорости судна нелинейна
(V << C). Правда, следует отметить, что эта нелинейность невелика.
Всё же устранить эту нелинейность желательно. Это можно осуществить с помощью двухлучевой радиодоплеровской системы с определением разности частот излучения, принятого по носовому 1 и кормовому 2 лучам (рис.2.7). В этом случае f1 = f0 – fд , f2 = f0 – fд .
 (2.22)
(2.22)
 — скоростная чувствительность лага, характеризующая приращение доплеровской частоты при изменении скорости судна на 1 узел.
— скоростная чувствительность лага, характеризующая приращение доплеровской частоты при изменении скорости судна на 1 узел.
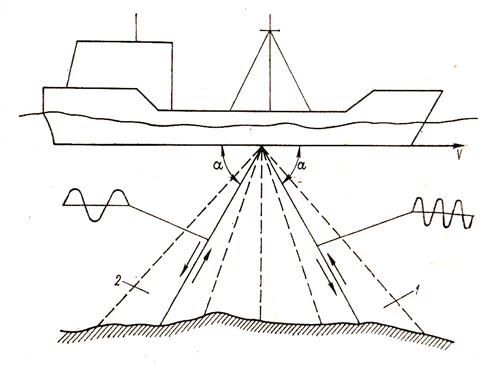
Рис. 2.7
 Из предыдущей формулы получаем выражение для скорости
Из предыдущей формулы получаем выражение для скорости
 (2.23)
(2.23)
Таким образом, для двухлучевой системы доплеровский сдвиг частоты линейно зависит от скорости судна. Использование двухлучевой системы позволяет также значительно уменьшить погрешности, вызываемые креном, дифферентом, качкой.
Сделанное ранее предположение о равенстве углов  и
и  1 на больших скоростях приводит к появлению некоторой систематической погрешности. Однако, как показывают расчеты, она пренебрежимо мала.
1 на больших скоростях приводит к появлению некоторой систематической погрешности. Однако, как показывают расчеты, она пренебрежимо мала.
Рассмотренная двухлучевая доплеровская система с лучами ориентированными в нос и корму судна, позволяет измерять только продольную составляющую скорости в горизонтальной плоскости.
Для измерения двух составляющих скорости используются многолучевые доплеровские системы. При этом наибольшее распространение получили системы с диаметрально-траверзным и Х – образным расположением лучей.
На рис. 2.8 приведены четырёхлучевые доплеровские системы с диаметрально-траверзным (а) и X – образным (б) расположением лучей.
При диаметрально-траверзном расположении (рис. 2.8, а) с помощью пары лучей нос-корма определяется продольная составляющая скорости, а с помощью лучей правый борт-левый борт — поперечная составляющая скорости. В этом случае формулы для определения скорости аналогичны (2.27).
где 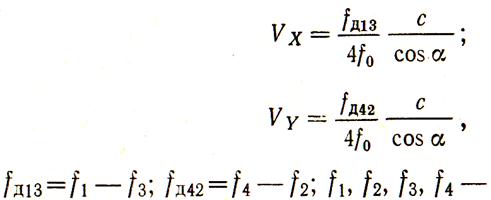 частоты сигналов, соответствующие 1, 2, 3, 4-му лучам.
частоты сигналов, соответствующие 1, 2, 3, 4-му лучам.
Путевая скорость и угол сноса могут быть найдены из выражений
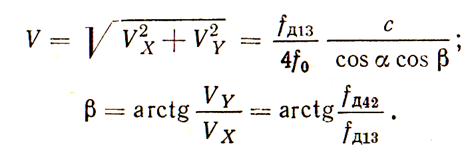
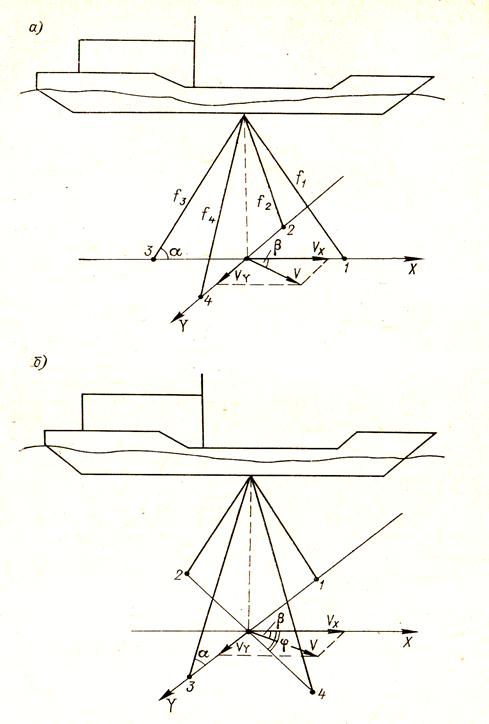
Рис. 2.8
При X – образным расположением лучей (рис. 2.8, б) разность частот, принятых по 1-му и 3-му лучам, определяется (при условии VZ = 0), выражением

Разность частот по 2-му и 4-му лучам определяется уравнением

Решая совместно эти уравнения, найдём

Теперь путевую скорость и угол сноса можно вычислить по формулам
В гидроакустическом доплеровском лаге принятый сигнал характеризуется не одной фиксированной частотой, а спектром частот шириной  ƒд. Положение этого спектра на оси частот относительно частоты излучения ƒ0 определяется средней доплеровской частотой. Ширина спектра приближенно
ƒд. Положение этого спектра на оси частот относительно частоты излучения ƒ0 определяется средней доплеровской частотой. Ширина спектра приближенно
определяется выражением
ƒд  ƒд tg
ƒд tg 
 , (2.24)
, (2.24)
где ƒд — ширина спектра отраженного сигнала на уровне на уровне половинной мощности;
— ширина диаграммы направленности на уровне 0,7 от максимума звукового давления.
Принципиально гидроакустические доплеровские лаги могут работать как в непрерывном, так и импульсном режиме излучения. Однако, лаг, работающий в непрерывном режиме, имеет существенное ограничение по рабочей глубине под килем судна. Это ограничение вызывается явлением объемной реверберации.
Поэтому наибольшее распространение получил импульсный режим излучения.
Сигнал объемной реверберации по окончании излучения с течением времени уменьшается. При правильном выборе частоты следования и длительности импульсов отраженный сигнал приходит к приемной антенне в момент времени, когда сигнал объемной реверберации практически отсутствует.
При глубинах под килем, превышающих заданные рабочие глубины, большинство гидроакустических доплеровских лагов переходит в режим измерения скорости судна относительно удаленных от днища слоев воды. В качестве рабочих сигналов при этом используются сигналы объемной реверберации. Принцип измерения скорости остается прежним.
| <== предыдущая страница | | | следующая страница ==> |
| Гидроакустические лаги | | | Устройство и основные погрешности доплеровского лага |
Дата добавления: 2014-08-04; просмотров: 1748; Нарушение авторских прав

Мы поможем в написании ваших работ!