Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Дельта-модуляция
Дельта-модуляция (ДМ) представляет один из методов кодирования разностного сигнала, при котором в линию передается информация лишь о знаке приращения разности соседних отсчетов ( предельный случай ДИКМ).
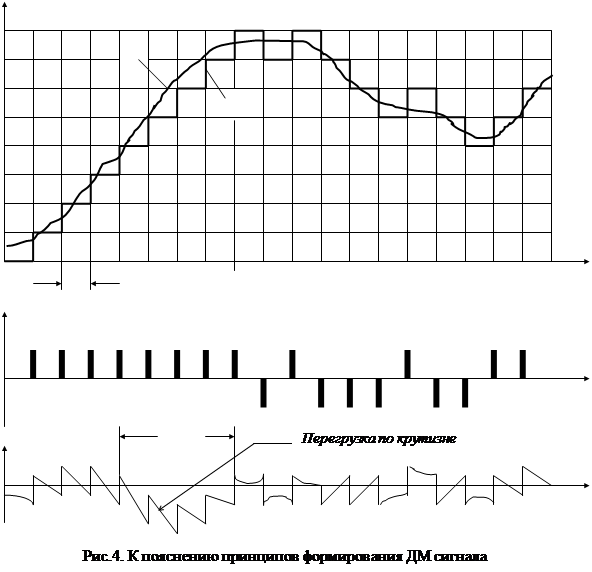
При ДМ так же, как и при обычной ИКМ, непрерывный сигнал подвергается дискретизации и квантованию, в результате чего непрерывная функция с(t) заменяется ступенчатой (кусочно-постоянной) функцией G(T), рис. 4,а.
C(t)
c(t)
G(t)
а)
t
Т
f(t)
б)
t
e(t) Тпер
в) t
Однако при ДМ, в отличие от классической ИКМ, при каждом шаге дискретизации допускается приращение ступенчатой функции G(t), равные величине только одного шага квантования d. В линию передаются сведения о знаке приращения
непрерывного сигнала с(t) в дискретные моменты времени kT. Алгоритм формирования линейного сигнала имеет вид
 , ( 11 )
, ( 11 )
здесь sign означает знак разности.
Таким образом, сигнал f(t) при ДМ оказывается кодированным по двоичной системе и представляет собой последовательность двухполярных импульсов, рис.4,б. Из формулы (11) и рис.4 ясно, что ступенчатый сигнал G(t) можно получить интегрированием линейного сигнала f(t), т.е.
 ( 12 ) Следовательно, операция декодирования в приемнике системы передачи сводится к интегрированию линейного сигнала f(t).
( 12 ) Следовательно, операция декодирования в приемнике системы передачи сводится к интегрированию линейного сигнала f(t).
Как и в системах с ИКМ или ДИКМ, при ДМ возникают шумы квантования, рис.4,в
 e (t) = G(t) – c(t). ( 13 )
e (t) = G(t) – c(t). ( 13 )
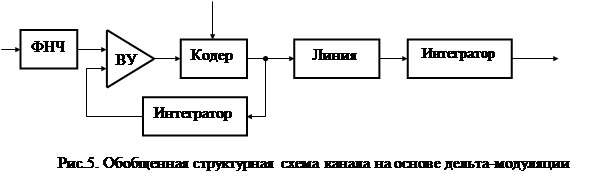
Упрощенная структурная схема цифрового канала на основе ДМ приведен на рис.5
fд
C(t) c(t) e(t) f(t) c¢(t)

G(t)
G(t)
Первичный сигнал С(t) ограничивается с помощью фильтра нижних частот (ФНЧ) по частоте и формируется сигнал с(t) с граничной частотой fмакс. Сигнал c(t) поступает на один из входов вычитающего устройства (ВУ), на другой вход которого поступает ступенчатый сигнал G(t), формируемый интегратором. На выходе ВУ получается разностный сигнал или сигнал ошибки e(t). Сигнал ошибки поступает на кодер, на другой вход которого поступает периодическая последовательность тактовых импульсов с частотой дискретизации fд = 1/Т. Кодер формирует положительный импульс, если в момент поступления тактового импульса e(t)< 0, и отрицательный – при e(t)> 0. Последовательность двухполярных импульсов f(t) направляется в линию и одновременно подается на интегратор, формирующий ступенчатый сигнал G(t). С выхода интегратора сигнал подводится к ВУ, на другой вход которого поступает сигнал с(t) и которое осуществляет операцию (13).
Функции декодирующего устройства в приемнике выполняет интегратор (аналогичный интегратору в схеме передатчика), на выходе которого получается ступенчатый сигнал G(t). После его сглаживания фильтром нижних частот (ФНЧ)
формируется сигнал с¢(t), достаточно близкий к сигналу с(t). Совокупность устройств, формирующих сигнал f(t), называется дельта-кодером, совокупность уст-
ройств, выполняющих преобразование сигнала f(t) в сигнал c¢(t), называется дельта-кодером, а в целом эти устройства образуют дельта-кодек.
Ранее отмечалось, что при ДМ приращение аппроксимирующей ступенчатой функции G(t) в моменты времени tк=kT равно шагу квантования d. В связи с этим, на участках передаваемого сигнала с(t) с крутизной большей, чем максимально возможная средняя крутизна монотонно возрастающей (или убывающей) функции G(t), шум квантования резко возрастает. Это явление называется перегрузкой кодера (кодирующего устройства). На рис.4,в перегрузка показана на участке Тпер . Чтобы при ДМ отсутствовали перегрузки, приращение функции с(t) за время тактовых интервалов Т не должны превышать шага квантования. Это условие можно записать в виде
 . ( 14 )
. ( 14 )
С другой стороны, чтобы шум квантования был достаточно мал, необходимо задать минимально допустимое число М ступеней шкалы квантования по уровню; следовательно
 . ( 15 )
. ( 15 )
Беря в формуле (14) знак равенства, получим из (15)
 , ( 16 )
, ( 16 )
где С¢макс = Мах [dc(t)/dt]. Из формулы (16) следует выражение для частоты дискретизации при ДМ
 . ( 17 )
. ( 17 )
Расчеты показывают, что для передачи телефонных сообщений с достаточно высоким качеством при ДМ требуется в 2…3 раза более широкая полоса частот, чем при ИКМ. Это существенный недостаток ДМ.
Основное достоинство ДМ – простота аппаратуры кодирования и декодирования
Системы передачи на основе ДМ это системы с линейным предсказанием. Одиночный интегратор в схеме рис.5 является простейшим видом предсказателя. Чем точнее предсказатель формирует копию сигнала (приближает функцию G(t) к сигналу с(t)), тем меньше их различие и, следовательно, меньше шумы квантования. Один из возможных способов совершенствования предсказания состоит в использовании в качестве предсказателя в схеме дельта-кодера двойного интегратора. Переход к двойному интегратору в схеме дельта-кодека повышает отношение сигнал-шумы квантования на 6…10 дБ для всех видов сигналов.
Дельта-модуляция с предсказателем на основе двойного интегратора называется дельта-модуляцией с двойным интегрированием.
Снизить частоту дискретизации для ДМ без увеличения шумов квантования или повысить защищенность от шумов квантования при меньшем значении час-
тоты дискретизации возможно применением ДМ с компандированием или, как ее еще называют, адаптивной ДМ. При ДМ с компандированием шаг квантования в процессе формирования ДМ сигнала не остается постоянным, а изменяется в зависимости от параметров передаваемого сигнала. Компандирование бывает мгновенным и инерционным.
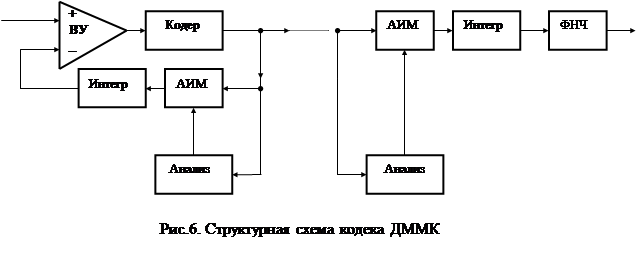
При мгновенном компандировании шаг квантования изменяется в каждом такте. Существует несколько разновидностей дельта-модуляции с мгновенным компандированием (ДММК), но все они основаны на изменении шага квантования при появлении перегрузки по крутизне (рис.4,в). Информация о появлении перегрузки может служить появление в выходном сигнале подряд нескольких одинаковых символов. В структуру дельта-кодека ДММК,рис.6, вводят анализатор (Анализ) вида импульсной последовательности и амплитудно-импульсный модулятор (АИМ). При появлении посылок одинаковой полярности
 |
Линия
анализатор управляет АИМ таким образом, что амплитуда импульсов, подаваемых на интегратор (Интегр), возрастает и соответственно возрастает шаг квантования копии сигнала. При обнаружении последовательных импульсов разной полярности анализатор подает на АИМ напряжение, уменьшающее амплитуду выходных импульсов и шаг изменения копии уменьшается. Существуют другие схемы кодеков ДММК, в которых вместо АИМ применяется широтно-импульсная модуляция (ШИМ). При ДММК защищенность от шумов квантования остается высокой в сравнительно большом диапазоне изменения мощностей входного сигнала, в то время как при ДМ она быстро уменьшается при увеличении входной мощности, что связано с ростом шумов перегрузки.
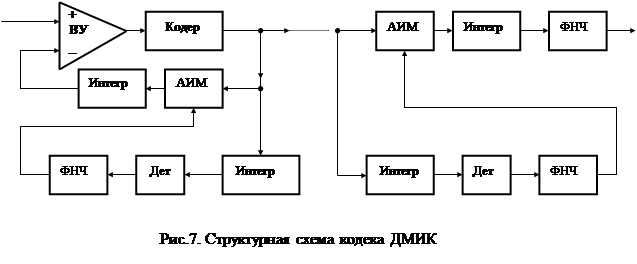
Дельта-модуляция с инерционным компандированием (ДМИК)изменение шага квантования происходит медленно, за время, соизмеримое с временем изменения огибающей кодируемого сигнала. Иногда ДМИК называют ДМ со слоговым компандированием, т.к. скорость изменения шага квантования соответствует скорости изменения слогов речи. Структурная схема ДМИК приведена на рис.7. Так же как и в случае ДММК, схема ДМИК содержит в цепи обратной связи АИМ (ШИМ) модулятор, изменяющий амплитуду или длительность импульсов, формирующих копию сигнала на выходе интегратора. Отличие этой схемы от преды-
дущей состоит в ом, что управление амплитудой импульсов осуществляется не безынерционно, а сравнительно медленно, в соответствии с изменением огибающей кодируемого сигнала. Сигнал управления может выделяться из выходного сигнала или его копии. Структурная схема, приведенная на рис.7, соответствует первому способу. В этом случае цепь управления содержит интегратор (Интегр), детектор (Дет), выделяющий низкочастотную огибающую сигнала, и ФНЧ.
 Вх
Вх
Линия
Вых
Инерционность адаптации кодека ДМИК близка к периоду основного тона речевого сигнала и равна примерно 10 мс, в то время как средний интервал следования слогов превышает 100 мс.
При ДМИК шаг квантования зависит от уровня входного сигнала, возрастая с его увеличением. Если при этом в некотором диапазоне изменения сигнала обеспечивается прямая пропорциональность между его напряжением и шагом квантования, отношение сигнал-шум квантования на выходе ФНЧ в данном диапазоне будет оставаться постоянным. Тем самым устраняется зависимость отношения сигнал-шум от уровня входного сигнала, свойственная ДМ с постоянным шагом. Эксперименты показали, что при использовании ДМИК и тактовой частоты 48 кГц отношение сигнал-шум квантования превышает 25 дБ при изменении уровня входного сигнала на 40 дБ. Следовательно, ДМИК обеспечивает такое же качество передачи, как и ИКМ при восьмиразрядном кодировании, но при требуемой скорости передачи в 1,5…2 раза более низкой, чем ИКМ.
В заключение отметим, что влияние ошибок в линейном тракте при передаче ДМ сигнала вызывает ошибку, равную двум шагам квантования, а при ИКМ оши-
бка зависит от того в каком разряде кодовой комбинации произошел сбой по воздействием помехи. Следовательно, требования к линейному тракту по достоверности передачи при ДМ на несколько порядков ниже, чем при ИКМ.
При ИКМ для демодуляции сигнала требуется два вида синхронизации: тактовая и цикловая по кодовым группам. При ДМ принципиально отсутствуют кодовые группы и для работы требуются только синхронизация по тактам.
| <== предыдущая страница | | | следующая страница ==> |
| Экономия числа разрядов можно определить по формуле | | | Иерархия цифровых систем передачи на основе импульсно-кодовой модуляции |
Дата добавления: 2014-08-04; просмотров: 870; Нарушение авторских прав

Мы поможем в написании ваших работ!