Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Тактико-технические характеристики ГАС МГ-342
1. Дальность обнаружения подводной лодки среднего водоизмещения на поисковой скорости 20 уз и при неограничивающих гидроакустических условиях до 25 – 40 км.
2. Срединные ошибки определения координат :
- по курсовому углу – не более 0.5°;
- по дистанции – не более 0.8% от номинала шкалы.
3. Станция обеспечивает обзор водного пространства по горизонту в пределах курсовых углов от 0 до 150° правого и левого бортов. Одновременный обзор в вертикальной плоскости обусловлен характеристикой напрвленности в этой плоскости (4°), для расширения угла обзора в вертикальной плоскости предусмотрена возможность наклона акустической антенны до 60° вниз и до 10° вверх.
4. Величина мертвой зоны по дистанции 1.5 – 2 км.
5. Направленность акустической антенны на уровне 0.7 от максимума :
а) в режиме обнаружения – около 4° при излучении и приеме в горизонтальной и вертикальной плоскостях;
б) в режиме сопровождения :
- на частоте f1 – около 4°;
- на частоте f2 – около 6° при излучении и приеме в горизонтальной и вертикальной плоскостях.
6. Подводимая электрическая мощность к акустической антенне не менее 200 кВА.
7. Приборы станции рассчитаны на нормальную работу при следующих условиях :
- температура окружающей среды от 0 до +45°;
- бортовая качка с амплитудой 10° и периодом 8 с, килевая качка с амплитудой 5° и периодом 5 с.
Состав станции. В состав станции входят следующие основные приборы и устройства :
- акустическая антенна с поворотно-наклонным устройством (прибор 1), представляющая собой плоское зеркало размерами 4 м на 4 м с укрепленными на нем цилиндрическими пьезокерамическими преобразователями (18 вертикальных по 8 преобразователей в каждом);
- генераторное устройство (приборы 2, 2А, 22);
- пульт управления и контроля (прибор 4), в котором сосредоточены блоки индикации, управления и контроля работы станции;
- предварительный усилитель и задерживающие цепи (прибор 8);
- коммутаторы приема-передачи (прибора 13);
- устройство компенсации эффекта Доплера (прибор 17);
- выпрямители (приборы 20, 20А);
- щиты питания (приборы 21, 21А);
- прибор контроля тракта излучения (прибор 24А);
- построитель траектории акустических лучей (прибор 25).
2.Внешние связи ГАС и работа по структурной схеме.
Внешние связи. Для обеспечения длительного слежения за пл станция имеет связь со следующими корабельными приборами и системами: лагом, гирокомпасом, центральной системой стабилизации, станцией МГ-325, системой “Спрут”, МВУ-200 и 201.
Принцип работы. Рассмотрим принцип работы станции по структурной схеме, представленной на рис.1.
Станция имеет следующие режимы работы:
- обнаружение, при котором осуществляется поиск целей шагом 30° в секторе обзора ±150° с выдачей целеуказания в тракт сопровождения;
- обнаружение – сопровождение, которое позволяет при сопровождение цели по курсовому углу на индикаторе ИЭ2 тракта сопровождения одновременно просматривать сектор 30° на индикаторе обнаружения ИЭ1;
- сопровождение, при котором вырабатываются точные координаты цели – курсовой угол и дистанция;
- прослушивание шумов цели в широкой полосе частот.
В режиме обнаружения излучение акустической энергии осуществляется практически одновременно в секторе 30°. В этом случае (при излучении) формируется девять характеристик направленности, по 4° каждая, при приеме указанный сектор перекрывается восьмью характеристиками направленности. Подключение акустической антены к аппаратуре трактов излучения и приема производится посредством коммутатора приема-передачи.
В тракте приема каждая из 18 полос акустической антены через коммутатор прием-передача подключается к своему предварительному усилителю. Выходы предварительных усилителей подключаются к приборам приемного тракта, обеспечивающим работу станции в режимах обнаружения, сопровождения и прослушивания.
После обнаружения цели производится грубое определение направления на цель, дистанция до нее и выдача целеуказания в тракт сопровождения.
В режиме обнаружения-сопровождения сопровождение цели осуществляется центральной характеристикой направленности, а обнаружение в пределах сектора 30° симметрично относительно направления на сопровождаемую цель.
В режиме сопровождения осуществляется уточнение координат цели, полуавтоматическое сопровождение цели по курсовому углу и дистанции, а также передача данных в систему ПСТБ, МВУ-200, 201. В режиме прослушивания производится обнаружение целей по создаваемому ими шуму. Прослушивание может вестись в секторе ±150°.
 В пределах сектора поиска перемещение акустической антенны на величину шага канала 30° может осуществляться с помощью автомата шагового поиска или вручную. При прослушивании вращение антенны производится вручную или системой полуавтомата.
В пределах сектора поиска перемещение акустической антенны на величину шага канала 30° может осуществляться с помощью автомата шагового поиска или вручную. При прослушивании вращение антенны производится вручную или системой полуавтомата.
Индикация принятых сигналов осуществляется:
- в режиме обнаружения – на индикаторе ИЭ-1, выполненном на электронно-лучевой трубке с разверткой типа “Б” и яркостной отметкой сигнала при использовании многоканальной системы индикации, а при амплитудной – на громкоговорителе и магнитофоне;
- в режиме сопровождения – на электронном индикаторе ИЭ-2 (индикатор отклонения пеленга), выполненном на двухлучевой электронной трубке с линейной разверткой, и регистраторе дистанции, путем записи эхо-сигнала на электромеханическую бумагу;
- в режиме прослушивания – на громкоговорителе и телефонах.
1.Гидроакустическая станция с опускаемой антенной МГ-329.
Примером гидроакустической станции с опускаемой акустической антенной является станция МГ-329. Станция предназначена для вооружения противолодочных кораблей, кораблей и судов специального назначения и позволяет производить обнаружение подводных лодок и определение их координат (пеленга и дистанции). Поиск и обнаружение подводных лодок производятся только на стопе корабля.
Аппаратура станции на корабле размещается:
- в гидроакустической рубке – импульсный генератор, усилитель, устройство управления и контроля, прибор питания и указатель глубины;
- на верхней палубе – опускаемое устройство в специальной кассете в непосредственной близости от лебедки и кран-балки. Опускаемое устройство состоит из двух отсеков: затапливаемого и герметичного. В затапливаемом отсеке размещаются рефлекторная антенна из титаната бария и предварительный усилитель. В герметичном отсеке размещаются привод вращения антенны, датчик курса и датчик глубины.
В станции предусмотрены четыре режима работы: шумопеленгование (ШП), ручное сопровождение (РС), определение дистанции (ОД), активный шаговый поиск (АП).
Станция обеспечивает:
- обнаружение цели при круговом обзоре пространства в режиме ШП;
- определение пеленга на цель;
- измерение дистанции до цели;
- автоматический шаговый обзор акватории.
Тактико-технические данные станции МГ-329:
- дальность обнаружения подводной лодки, маневрирующей со скоростью 8 уз на глубине 50 м при благоприятных гидроакустических условиях, в режиме ШП 50 каб, в режимах АП и ОД – 33 каб;
- срединная ошибка определения пеленга 5°;
- срединная ошибка определения дистанции 3% от шкалы;
- станция может работать при волнении моря 3 – 4 балла при дрейфе корабля не более 1.5 уз;
- предельная глубина погружения акустической антенны 50 м;
- время погружения (подъема) акустической антенны на предельную глубину 70 с;
- время однократного обследования акватории с учетом опускания и подъема акустической антенны: в режиме ШП – 3 мин, в режиме АП – 6.5 мин, в обоих режимах – 7 мин;
- станция готова к работе через 3 мин после включения;
- продолжительность непрерывной работы не более 4 ч;
- станция работает на двух эталонах частот;полоса пропускания приемного тракта:
в режиме ШП – 2500 Гц,
в режимах АП и ОД – 60 Гц;
- скорость вращения акустической антенны в режиме ШП 4 об/мин;
- шаг обзора при отработке шагового автомата 15°;
- ширина характеристики направленности во всех плоскостях 20°;
- станция питается трехфазным переменным напряжением 220 В, 400 Гц и постоянным напряжением 27 В;
- потребляемая мощность от сети переменного тока 400 ВА, от сети постоянного тока – 200 кВт;
- мощность, потребляемая лебедкой от сети постоянного тока, 2 кВт.
- срединная ошибка определения пеленга 5°;
Функциональная схема станции представлена на рис.1
В режиме ШП пеленгование осуществляется по максимальному методу. При постановке переключателя рода работ “ШП-РС-АП” устройства управления и контроля в положение “ШП” на обмотку возбуждения двигателя ЭМ-1М блока управления подается питание. Так как двигатель ЭМ-1М непрерывно разворачивает ротор сельсина С-3В со скоростью 4 об/мин, то с такой же скоростью вращается антенна.
Индукционный датчик, жестко закрепленный на корпусе опускаемого устройства, выдает трехфазное напряжение, зависящее от угла поворота корпуса относительно магнитного меридиана.
В дифференциальном сельсине происходит суммирование углов поворота опускаемого устройства относительно магнитного меридиана и акустической антенны относительно корпуса. В результате вырабатывается сигнал рассогласования, определяющий угловое положение акустической антенны относительно магнитного меридиана. Стрелочный указатель блока модулятора устройства управления и контроля и фиксирует этот угол, равный пеленгу на цель.
Так как ротор синусно-косинусного трансформатора ВТМ-1В поворачивается синхронно с акустической антенной, то на его статорных обмотках индуктируются напряжения, изменяющиесся по закону синуса и косинуса угла поворота антенны относительно меридиана. После детектирования синусная и косинусная составляющие прикладываются к пластинам электронно-лучевой трубки, определяя положение луча на экране. При непрерывном вращении акустической антенны в режиме ШП луч на экране индикатора описывает кольцо.
Таким образом, данные о положениии оси характеристики направленности антенны относительно магнитного меридиана можно определить по экрану индикатора и стрелочному указателю устройства управления и контроля.
Принятые акустической антенной шумы преобразуются в электрическое напряжение. Это напряжение через коммутатор “Прием – передача” подается на вход предварительного усилителя. С выхода усилителя сигнал по кабель-тросу поступает на вход усилителя. После усиления напряжение сигнала поступает на преобразователь частоты, состоящий из смесителя, гетеродина и фильтра нижних частот. На выходе преобразователя образуется напряжение звуковой частоты, которое подается на головные телефоны и на усилитель подсветки, а с него на модулятор трубки для подсветки. Кроме того, этот сигнал поступает на базовый детектор усилителя. Нагрузкой базового детектора является обмотка управления магнитного модулятора блока модулятора.
Рабочие обмотки магнитного модулятора подключены к цепи 200 В, 400 Гц последовательно с роторными обмотками вращающихся трансформаторов ВТМ – 1В блока управления и механизма вращения трансформатора и первичной обмотки трансформатора опорного напряжения. При поступлении на вход базового детектора сигнала от цели изменяется постоянный ток, протекающий через управляющую обмотку магнитного модулятора. Это приводит к перераспределению напряжения питания между рабочими магнитного модулятора и роторными обмотками вращающихся трансформаторов ВТМ – 1В вследствие чего изменяется напряжение и на статорных обмотках ВТМ – 1В, что приводит к радиальному отклонению луча на экране ЭЛТ.
Таким образом, в момент прохождения характеристики направленности акустической антенны по цели на кольцевой развертке ЭЛТ наблюдается амплитудная отметка, интенсивность свечения которой несколько выше интенсивности свечения развертки.
В режиме РС с обмотки управления двигателя ЭМ – 1М снимается напряжение питания, и двигатель останавливается. Поворот акустической антенны осуществляется с помощью маховичка ручного сопровождения. В остальном станция работает так же, как и в режиме ШП.
Для устранения влияния случайных разворотов акустической антенны в станции введена стабилизация положения антенны во всех режимах работы.
В режим ОД станция переводится из режима РС нажатием кнопки запуска в приборе управления и контроля. При нажатии кнопки запуска срабатывает реле Р2.
Через 0.15 с после срабатывания реле Р2 кулачковый механизм размыкает контакты блокировки цепи формирования импульса запуска. Цепь формирования запускающего импульса вырабатывает импульс, который запускает импульсный генератор. С выхода импульсного генератора через коммутатор “Прием – передача” видеоимпульс поступает на акустическую антенну, преобразуется в акустический импульс и излучается. Через 0.2 с после излучения импульса кулачковый механизм размыкает контакты включения реле Р3. Реле обесточивается и снимает переменное напряжение со схемы гашения, и на экране ЭЛТ начинается развертка. Временная задержка необходима для устранения нелинейного участка развертки, вызванного иннерционностью двигателя. Таким образом обеспечивается синхронность начала излучения и начала развертки. Кроме того, снимается напряжение с накопителя, и коммутатор “Прием – передача” переключает станцию на прием.
При наличии отраженного сигнала прохождение по приемному тракту и индикация его на экране ЭЛТ и в телефонах происходят так же, как и в режиме ШП.
По истечении 8.8 с, что соответствует полной длительности развертки на экране, т.е. времени прохождения сигнала до цели, находящейся на максимальной дальности действия, и обратно, кулачковый механизм замыкает контакты включения реле Р3. За счет этого разблокируется кнопка запуска, подключается выход усилителя к усилителю подсветки, снимается переменное напряжение со схемы гашения и напряжение питания двигателя. Схема торможения подает на двигатель тормозящее напряжение двигатель останавливается. Так как схема гашения не работает, на экране трубки появляется развертка. Реле коммутации фильтров усилителя отключает фильтр с полосой пропускания 600 Гц. Коммутатор режимов работы реле Р1 снова подключает к повышающим трансформаторам статорные обмотки вращающегося трансформатора ВТМ – 1В. станция автоматически переходит в режим РС. Если нужно произвести измерение дистанции до цели еще раз, то для этого нужно нажать кнопку запуска.
2. Гидроакустическая станция с буксируемой антенной МГ-325.
Примером гидролокационной станции буксируемой акустической антенной может служить станция МГ – 325, предназначенная для поиска, обнаружения и определения координат подводных лодок при неблагоприятных гидрологических условиях, когда использование гидролокаторов с подкильными акустическими антеннами для обнаружения подводных лодок затруднено. Станцией вооружаются корабли пр. 159, 1123, 1134Б, 1135.
Аппаратура станции на корабле размещается:
- в гидроакустической рубке – индикаторное устройство и устройство пуска;
- в гидроакустическом отделе – генератор, прибор питания генератора, импульсный
поляризатор и накопители;
- на верхней палубе – лебедка, подъемно – опускное и буксируемое устройства.
Буксируемое устройство имеет 2 отсека: герметический, в котором размещаются усилительное устройство, согласающее устройство и датчик затекания, и затапливаемый, в котором размещаются акустическая антенна, состоящяя из излучающей и приемной частей, и преобразователь, предназначенный для излучения и приема акустических колебаний при контрольной проверке работы станции.
Станция работает в активном режиме и обеспечивает:
- поиск и обнаружение подводных лодок;
- определение дистанции до цели и курсового угла (пеленга) на цель;
- выдачу координат (дистанции и курсового угла) цели в гидролокационную станцию точного определения координат и приборы управления стрельбой.
Тактико – технические данные станции МГ – 325:
- дальность обнаружения подводной лодки при скорости корабля 25 уз в условиях подводного звукового канала составляет 4 – 7 км;
- срединная ошибка пеленгования относительно буксируемого устройства 3°;
- срединная ошибка определения дистанции: 1.5% на шкале 7.5 км и 2% на шкале 3.75 км.
- рабочий сектор обзора акватории составляет 250° по курсу буксируемого устройства;
- постановка и выборка буксируемого устройства возможна при волнении моря не более 3 – 4 баллов;
- глубина буксировки может меняться в пределах 15 – 100 м;
- точность хода буксируемого устройства при установившейся скорости буксировки: по
крену ± 3 °, по глубине ± 2 м;
- станция работает на одном из 3 эталонов частот;
- электрическая мощность, подводимая к излучающей части антенны, не менее 100 кВт;
- длительность излучаемых импульсов 25 и 5 мс;
- раствор характеристики направленности акустической антенны на уровне 0.7 для излучающей части в вертикальной плоскости 14°, в горизонтальной - 270°, для приемной части в обеих плоскостях - 14°;
- аппаратура станции рассчитана на работу при температуре окружающей среды от - 10 до +50°С в условиях вибрации в диапозане частот 5 – 35 Гц с ускорением 1g для аппаратуры, размещенной на корабле, и в диапазоне 15 – 20 Гц с ускорением 2g для аппаратуры, размещенной на буксируемом устройстве;
- питание станции от сети трехфазного тока 220 В, 50 Гц;
- потребляемая мощность 6,5 кВА;
- масса станции 5300 кг.
Упрощенная функциональная схема станции представлена на рис.4. Станция работает в режиме эхо – пеленгования. Импульсы от генератора через токосъемник лебедки, кабель – трос и согласующее устройство поступают на излучающую часть акустической антенны, в которой преобразуются в акустические колебания. Одновременно осуществляется запуск развертки по дистанции индикатора секторного обзора, который предназначен для визуального наблюдения целей в прямоугольных координатах (дистанция – курсовой угол). Излучение сигнала производится в секторе 250° по курсу буксируемого устройства. После излучения станция автоматически переключается в режим приема.
Отраженные от подводного объекта акустические сигналы воспринимаются приемной частью акустической антенны, в которой преобразуются в акустические сигналы, после чего поступают на 26 предварительных усилителей по числу приемников антенны. После усиления сигналы поступают на компенсатор, который формирует 20 пространственных приемных характеристик направленности (20 каналов). Таким образом, в секторе 250° осуществляется направленный прием. С выхода компенсатора сигналы поступают на 20 основных усилителя по числу каналов, где происходит преобразование рабочей частоты сигнала в промежуточную и дальнейшее ее усиление. Выходы основных усилителей подключаются к входам коммутаторов секторного и шагового обзора.
Электронный коммутатор секторного обзора осуществляет поочередное подключение выходов основных усилителей к индикатору секторного обзора. Цикл переключения происходит синхронно с разверткой по курсовому углу. За счет этого на экране индикатора секторного обзора образуется двухкоординатная строчная развертка дистанция – курсовой угол.
Секторный обзор используется при поиске подводных лодок. Эхо – сигнал фиксируется на экране индикатора секторного обзора в виде яркостной отметки, где по ее положению определяется дистанция и курсовой угол. Курсовой угол (пеленг) на цель определяется относительно буксируемого устройства путем отсчета угла в горизонтальной плоскости между направлением прихода эхо – сигнала и диаметральной плоскостью буксируемого устройства (истинный меридиан).
При обнаружении подводной цели оператор с помощью переключателя каналов подключает к индикатору шагового обзора канал, в котором обнаружен сигнал. Переключение каналов в данном случае осуществляется коммутатором шагового обзора, имеющим частотное управление каналами. На экране индикатора шагового обзора синхронно с излучением импульса образуется развертка по дальности. В момент прихода отраженного сигнала наблюдается амплитудная отметка. Так с помощью индикатора шагового обзора определяется дистанция в выбранном канале (направлении).
Индикатор секторного обзора применяется для сопровождения цели.
В тракт шагового обзора входит слуховой тракт, позволяющий прослушивать эхо-сигнал в телефонах и громкоговорителе. Подключение слухового тракта к выбранному оператором каналу производится одновременно с подключением индикатора шагового обзора переключателем каналов.
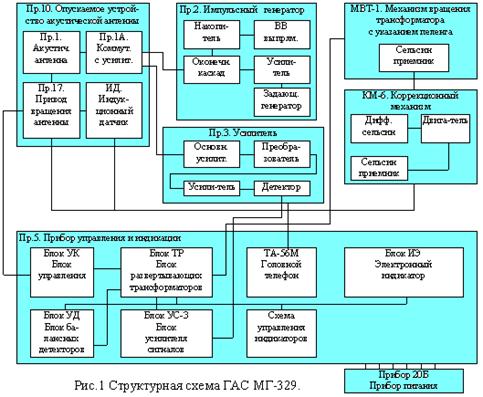

Рис.2. Структурная схема ГАС МГ-325.
1. Назначение, решаемые задачи, состав станции, размещение ГАС МГ-7.
2. Режимы pаботы, пpинцип действия, ТТХ ГАС МГ-7.
Литеpатуpа:
1.Техническое описание ГАС МГ-7.
2.Фоpмуляp ГАС МГ-7.
3.Инстpукция по эксплуатации ГАС МГ-7.
I. Назначение, задачи, состав станции, размещение.
1. Корабельная гидроакустическая станция МГ-7 устанавливается на надводных кораблях и предназначена для решения задач:
- обнаружения подводных диверсионных сил и средств (ПДСС);
- определения координат обнаруженных целей (дистанция, курсовой угол).
2. ГАС МГ-7 используется при стоянке кораблей на якоре или бочке в пунктах маневрен-ного базирования и на незащищенных рейдах.
3. В состав гидроакустической станции МГ-7 входят следующие приборы:
-прибор 1 - гидроакустическая антенна;
-прибор 2 - генератор зондирующих импульсов;
-прибор 4 - основной электронный индикатор
-прибор 5 - источник питания;
-прибор 6 - выносной электронный индикатор;
-прибор 13 - многоканальный предварительный усилитель с электронным коммутатором.
Назначение приборов ГАС МГ-7 и их размещение приведены в табл. 1.
II. Режим работы, принцип действия, ТТХ станции.
4. Станция используется в следующих режимах;
I - режим полной мощности;
II - режим малой мощности (25% от полной мощности излучения);
III - режим имитации цели и контроля несения вахты оператором.
Таблица 1 НАЗНАЧЕНИЕ И РАЗМЕЩЕНИЕ ПРИБОРОВ ГАС МГ-7




 Наимен-е Назначение прибора Место установки
Наимен-е Назначение прибора Место установки
прибора
Прибор 1 Преобразование электрических сигналов - На верхней палубе
в гидроакустические при излучении; гидроакус- корабля в защитном
тических в электрические, их усиление и де - кожухе
тектирование при приеме; формирование одной
характеристики при приеме
Прибор 2 Формирование и генерирование элект- Гидроакустическая
рических импульсов необходимой длите- рубка
льности и формы на рабочей частоте станции
Прибор 4 Усиление и индикация эхо-сигналов от Гидроакустическая
цели на экране ИКО, определение теку- рубка
щих координат цели, управление режи-



 мами работы, контроль за работоспосо-
мами работы, контроль за работоспосо-
бностью приборов станции.

Прибор 5 Формирование и стабилизация напря- Гидроакустическая
жений электропитания приборов станции рубка

Прибор 6 Индикация эхо-сигналов от цели на БИП
экране ИКО. Формирование электричес-
ких сигналов, имитирующих эхо-сигналы
от одной или двух целей, управление
режимами работы блока имитации,
синхронизации двух ГАС МГ-7 при од-
новременной работе на корабле

Прибор 13 Усиление отраженных гидроакустичес-
ких сигналов, электронный опрос при-
емных каналов и их последовательное
подключение к ИКО

5. Принцип работы Схема блочная (ып1.030.048 СхБ)
Действие станции основано на принципе импульсной гидролокации цели.
Блок управления БУ-2 вырабатывает импульсы прямоугольной формы длительностью t=0.5мсек с периодом следования Tсл =533мсек, которые поступают на генератор зондирующих импульсов, вырабатывающий импульсы длительностью t=0.5мсек с высокочастотным заполнением. С выхода генератора эти импульсы поступают на гидроакустический излучатель (И) с ненаправленным излучением в горизонтальной плоскости и узконаправленным в вертикальной  на уровне 0.7(Фиг.1). Отражённые от цели сигналы, в зависимости от направления, поступают на соответствующие гидроакустические приёмники (ГАП), образующие статистический веер характеристик направленности приёмной антенны пересекающихся на уровне 0.5 (Фиг.2), преобразуются в электрические сигналы, усиливаются усилителем высокой частоты с автоматической регулировкой усиления (УВЧ с АРУ) и детектируются амплитудным детектором (Д). Таким образом, на выходе рабочих каналов выделяется низкочастотная огибающая сигнала, т.е. видеосигнал. Сигналы с выходов 32-х каналов поступают на коммутатор электронный, который производит последовательный опрос каналов с частотой опроса f=1920Гц. За время длительности отражённого сигнала каждый канал опрашивается коммутатором один раз. Для синхронизации развёртки луча ЭЛТ с опросом каналов, частота опроса 1920Гц поступает с электронного коммутатора в блок управления (БУ-2), который управляет работой блока развёртки (БР). С той же целью сигнал 1920гц поступает через блок синхронизации (БС) индикатора выносного в блок ИЭ этого индикатора.
на уровне 0.7(Фиг.1). Отражённые от цели сигналы, в зависимости от направления, поступают на соответствующие гидроакустические приёмники (ГАП), образующие статистический веер характеристик направленности приёмной антенны пересекающихся на уровне 0.5 (Фиг.2), преобразуются в электрические сигналы, усиливаются усилителем высокой частоты с автоматической регулировкой усиления (УВЧ с АРУ) и детектируются амплитудным детектором (Д). Таким образом, на выходе рабочих каналов выделяется низкочастотная огибающая сигнала, т.е. видеосигнал. Сигналы с выходов 32-х каналов поступают на коммутатор электронный, который производит последовательный опрос каналов с частотой опроса f=1920Гц. За время длительности отражённого сигнала каждый канал опрашивается коммутатором один раз. Для синхронизации развёртки луча ЭЛТ с опросом каналов, частота опроса 1920Гц поступает с электронного коммутатора в блок управления (БУ-2), который управляет работой блока развёртки (БР). С той же целью сигнал 1920гц поступает через блок синхронизации (БС) индикатора выносного в блок ИЭ этого индикатора.
Блок развёртки вырабатывает трёхфазное синусоидальное напряжение с амплитудой, изменяющейся по пилообразному закону (Фиг.3), которым производится спиральная развёртка луча электронно-лучевой трубкой (ЭЛТ).
Для развёртки луча ЭЛТ используется частота опроса 1920Гц, что обеспечивает соответствие положения электронного луча на экране ЭЛТ опросу определённого канала. Так, например, при каждом опросе первого канала электронный луч всегда находится в секторе 1(Фиг.2), при опросе второго канала - в секторе 2 и т.д. Если на вход канала поступает отражённый от цели импульс, превышающий уровень помехи, то при опросе этого канала на выходе электронного коммутатора, соединённого с входом амплитудного селектора (СА), напряжение превысит установленный порог и блок СА выдаст на вход оконечного видео усилителя (ВУО) стандартный по амплитуде импульс.
Усиленный видеоусилителем этот импульс поступает на модулятор ЭЛТ и производит засветку экрана в том месте, где находится электронный луч в момент поступления сигнала (Фиг.4).
Так как гидроакустическая система ориентирована относительно корабля, а посылка зондирующих импульсов синхронизирована с началом развёртки луча ЭЛТ, то местоположением яркостной отметки на экране определяются координаты цели относительно корабля по дистанции и курсовому углу.
Учитывая, что уровень реверберационной помехи и сигналов в начале такта очень велик и постепенно спадает, а усилитель высокой частоты (УВЧ с АРУ) не в состоянии полностью выровнять уровень сигнала по дистанции. В блоке коммутатора осуществляется автоматическая регулировка квантования уровня (порога ограничения снизу) по группам (8 каналов в каждой) каналов, а порог срабатывания амплитудного селектора имеет дополнительную временную автоматическую регулировку (ВАРУ), которая обеспечивает постепенное снижение порога срабатывания от начала такта к концу. Сигналы управления ВАРУ поступают с блока БУ-2 синхронно с сигналами начала развёртки и посылок зондирующих импульсов. С амплитудного селектора сигналы одновременно поступают в блок ИЭ выносного индикатора (прибор 6), работа которого синхронизируется блоком БУ-2 прибора 4 с помощью блоков синхронизации (БС) в приборах 4 и 6, благодаря чему на экране выносного индикатора дублируются сигналы, поступающие на основной индикатор.
Формирователь электронного визира (ФЭВ), расположенный в блоке электронного съёма (СЭ) прибора 4, управляемый блоком БУ-2, формирует импульс с заполнением частотой 1920Гц, поступающий на ВУО и далее на ЭЛТ, образуя на экране электронный визир (см. Фиг.5).
Величина электронного визира пропорциональна длительности этого импульса и изменяется прецизионным потенциометром (ПТ), шкала которого проградуирована в единицах дистанции. Направление электронного визира устанавливается изменением фазы заполняющего напряжения фазовращателем (ФВ), шкала которого проградуирована в курсовых углах.
Таким образом, изменяя положение фазовращателя и прецизионного потенциометра можно конец линии электронного визира установить в любую точку экрана, а по соответствующим шкалам (блока СЭ) определить координаты этой точки. Из блока СЭ сигнал, формирующий электронный визир, параллельно передаётся в блок ИЭ выносного индикатора, где выполняет роль указателя местоположения цели, обнаруженной оператором. Координаты цели на выносном индикаторе определяются по шкале нанесённой на экран.
Блок имитации (БИ) в приборе 6 формирует импульсы длительностью 20-50мксек с регулируемой частотой следования равной  . Поступая в блоки ИЭ приборов 4 и 6 импульсы производят засветку экрана (яркостную отметку), подобную отметке от цели.
. Поступая в блоки ИЭ приборов 4 и 6 импульсы производят засветку экрана (яркостную отметку), подобную отметке от цели.
Разность между периодом развёртки (Tраз.) и периодом следования имитирующих -(Tимп.) даёт изменение положения яркостной отметки по радиусу (дистанции).
Изменение фазы этого сигнала фазовращателем даёт возможность перемещения яркостной отметки, имитирующей цель, в любой сектор экрана.
При установке на одном корабле двух станций (носовой и кормовой) и необходимости одновременной их работы, блоки синхронизации приборов 6 этих станций соединяются между собой, чем достигается синхронизация посылок зондирующих импульсов и уменьшение мешающего действия зондирующих импульсов и реверберации одной станции на другую.
6. Схема станции содержит элементы встроенного контроля и сигнализации, позволяющие контролировать работоспособность приборов 1, 2, 5.
При нарушении герметичности прибора 1 или выходе из строя одного из источников питания прибора 5 загораются сигнальные лампы АВАРИЯ ПРИБОРОВ 1,5, расположенные на лицевой панели прибора 4, и включается звуковая сигнализация.
В случае уменьшения мощности излучения блок контроля излучения прибора 2 вырабатывает сигнал, поступающий в прибор 4. При этом на лицевой панели прибора 4 загорается сигнальная лампа АВАРИЯ ПРИБОРА 2 и включается звуковая сигнализация.
7. Контроль исправного состояния приемных каналов производится по наличию в конце развертки яркостных контрольных меток в положении "300-400 м" переключателя ДИАПАЗОНЫ.
При снижении коэффициента усиления или выходе из строя одного или нескольких усилителей высокой частоты (УВЧ) на экране электронно-лучевой трубки основного индикатора (прибора 4) отсутствуют соответствующие контрольные метки.
8. На одном корабле обеспечивается одновременная работа двух ГАС МГ-7 при разнесении гидроакустических антенн на 70- 150 м.
Одновременная работа ГАС МГ-7 с другими станциями и системами не предусмотрена.
9. Основные тактические характеристики ГАС МГ-7 приведены на табл. 2.
10. Основные технические характеристики ГАС МГ-7 приведены в табл. 3.
11. Боевой расчет ГАС МГ-7 - нештатный. К обслуживанию и несению вахты на ГАС МГ-7 допускается личный состав РТС, изучивший ее устройство и сдавший зачеты на допуск к самостоятельному несению вахты на станции.
Таблица 2
ОСНОВНЫЕ ТАКТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАС МГ-7
Характеристики Численное
значение
Средняя дальность обнаружения ПДСС, м:
- сверхмалая подводная лодка 200
- подводные средства движения 150
- подводный диверсант 120
Сектор обзора в горизонтальной плоскости, (°) 360
Глубина просматриваемой круговой зоны 20
Среднеквадратическая ошибка определения
координат цели:
- по дистанции, % шкалы 3
- по курсовому углу, ° 3
Разрешающая способность:
- по дистанции, м 10
- по курсовому углу, ° 15
Рабочая глубина установки прибора 1, м 10
Время приведения станции в боевую готовность (мин) 25
Время непрерывной работы, ч 24
Примечание. Средняя дальность обнаружения ПДСС при вероятности правильного обнаружения 0.9; волнении моря не более 3 баллов; глубине моря не менее 20 м; приведенном уровне шумовых помех не более 0.02 Па.
Таблица 3. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАС МГ-7

Характеристики Численное
значение

Длительность зондирующего импульса, мс 0.5
Структура зондирующего импульса Прямоугольный
с высокочастотным
заполнением
Характеристика направленности гидроакус-
тической антенны, °:
а) режим излучения:
- в горизонтальной плоскости 360
- в вертикальной плоскости 3
б) режим приема:
- в горизонтальной плоскости 32 XH по 12
- в вертикальной плоскости 12
Шкалы дальности, м 0-100
50-150
100-200
150-250
200-300
300-400
0-200
50-250
Потребляемая мощность от сети 220/380 В 50 Гц (Вт) 800
Наработка станции до среднего ремонта, ч 5000
Условия нормальной работы:
- температура окружающей среды, °С 0-40
- относительная влажность воздуха при до 98
температуре 20-25 °С, %
- волнения моря, баллы до 3
Дата добавления: 2014-10-02; просмотров: 1067; Нарушение авторских прав

Мы поможем в написании ваших работ!