Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Уравнения Лагранжа 2-го рода
Одним из преимуществ аналитической механики является использование обобщенных координат.
Обобщенными координатами механической системы называются независимые между собой параметры q1, q2, …, qS любой размерности, однозначно определяющие положение системы в любой момент времени.
Число обобщенных координат равно S – числу степеней свободы механической системы. Положение каждой ν-й точки системы, то есть ее радиус вектор в общем случае всегда можно выразить в виде функции обобщенных координат:
 (24)
(24)
Общее уравнение динамики в обобщенных координатах выглядит в виде системы S уравнений следующим образом:
 ;
;
 ;
;
……..………. ;
 (25)
(25)
………..……. ;
 ,
,
здесь  – обобщенная сила, соответствующая обобщенной координате
– обобщенная сила, соответствующая обобщенной координате  :
:
 (26)
(26)
а  – обобщенная сила инерции, соответствующая обобщенной координате :
– обобщенная сила инерции, соответствующая обобщенной координате :
 (27)
(27)
Уравнения Лагранжа 2-го рода выводятся из общего уравнения динамики в обобщенных координатах. Число уравнений соответствует числу степеней свободы:
 (28)
(28)
Для составления уравнения Лагранжа 2-го рода выбираются обобщенные координаты  и находятся обобщенные скорости
и находятся обобщенные скорости  . Находится кинетическая энергия системы, которая является функцией обобщенных скоростей, и, в некоторых случаях, обобщенных координат. Выполняются операции дифференцирования кинетической энергии, предусмотренные левыми частями уравнений Лагранжа.Полученные выражения приравниваются обобщенным силам, для нахождения которых помимо формул (26) часто при решении задач используют следующие:
. Находится кинетическая энергия системы, которая является функцией обобщенных скоростей, и, в некоторых случаях, обобщенных координат. Выполняются операции дифференцирования кинетической энергии, предусмотренные левыми частями уравнений Лагранжа.Полученные выражения приравниваются обобщенным силам, для нахождения которых помимо формул (26) часто при решении задач используют следующие:
 (29)
(29)
В числителе правой части формулы – сумма элементарных работ все активных сил на возможном перемещении системы, соответствующем вариации i-й обобщенной координаты –  . При этом возможном перемещении все остальные обобщенные координаты не изменяются. Полученные уравнения являются дифференциальными уравнениями движения механической системы с S степенями свободы.
. При этом возможном перемещении все остальные обобщенные координаты не изменяются. Полученные уравнения являются дифференциальными уравнениями движения механической системы с S степенями свободы.
3. Задания
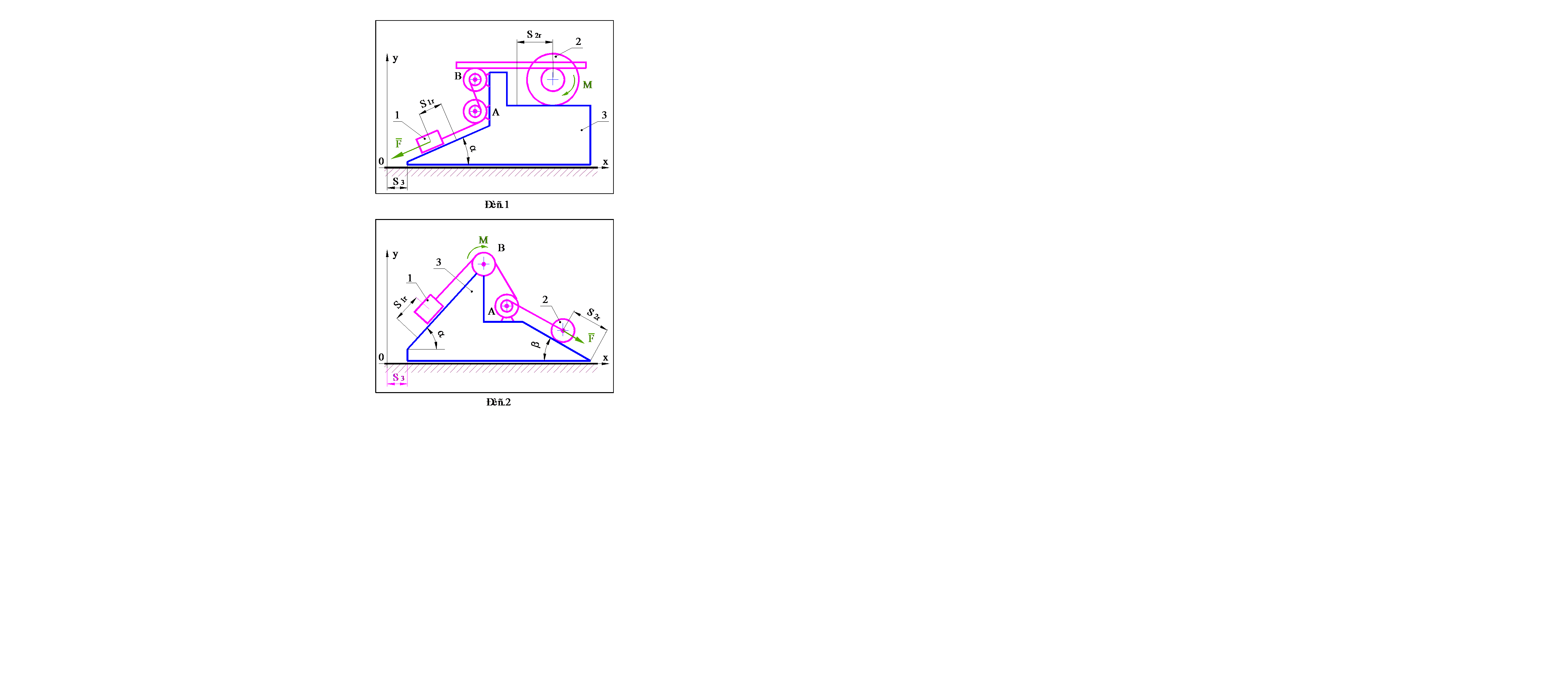
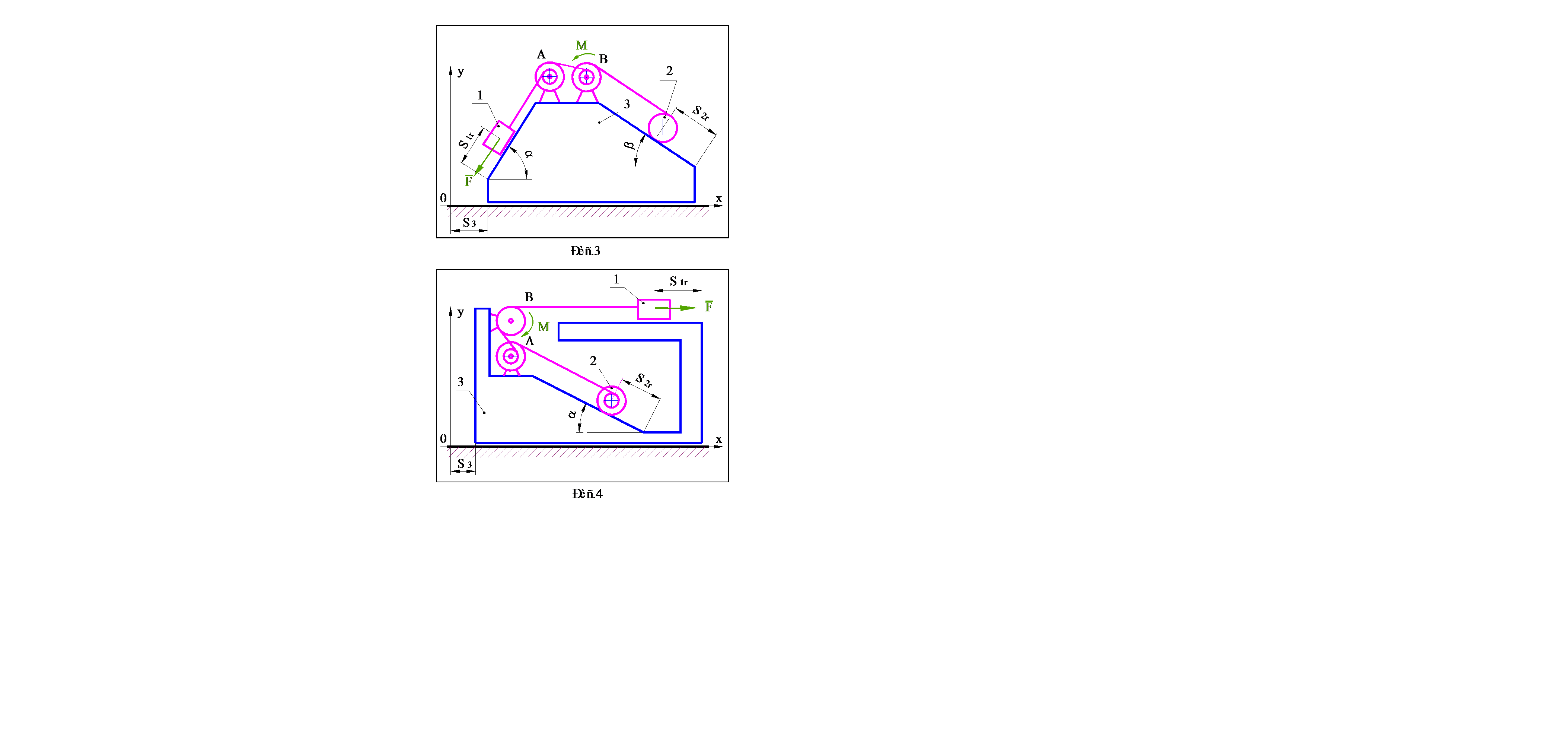
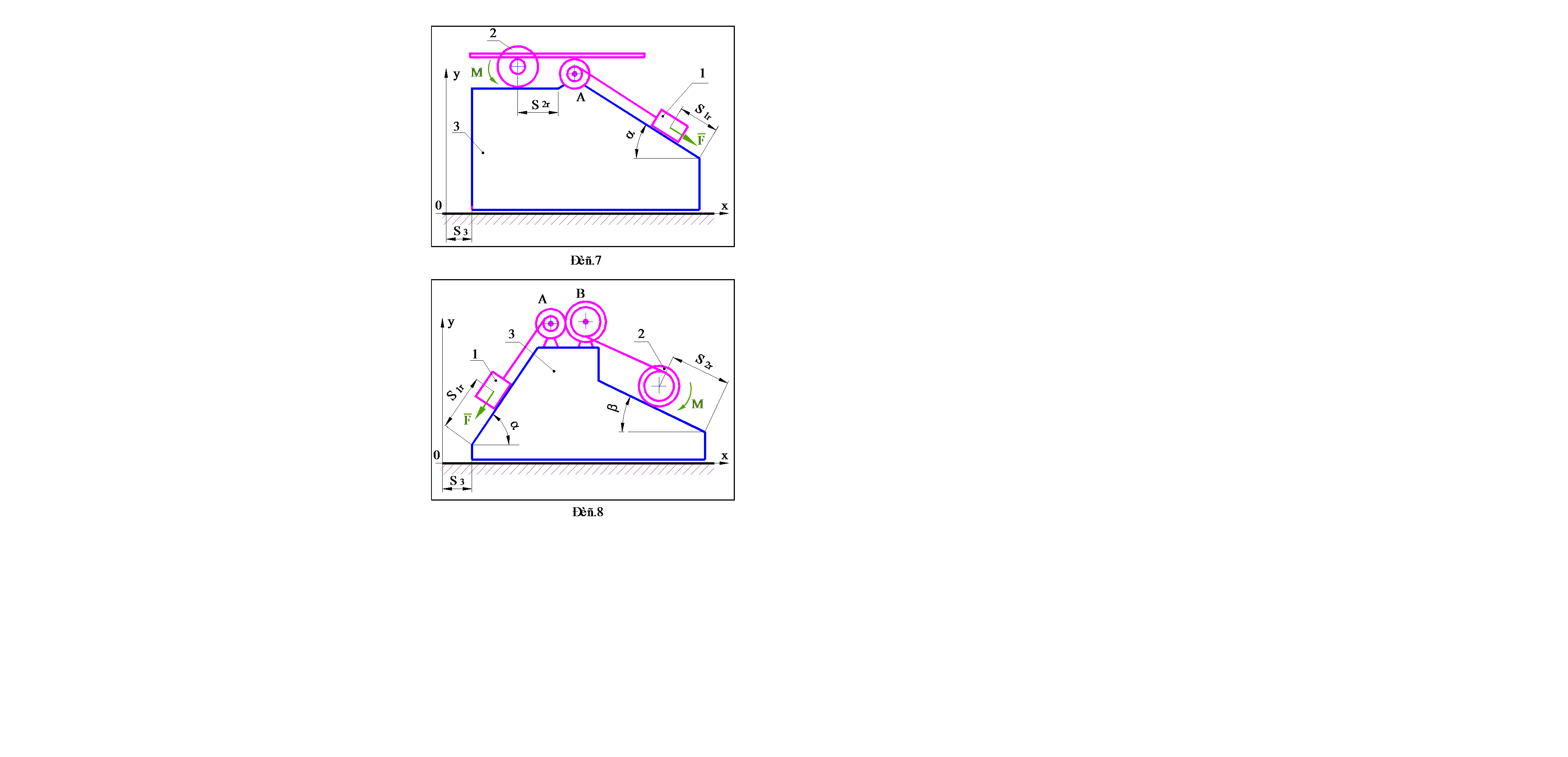
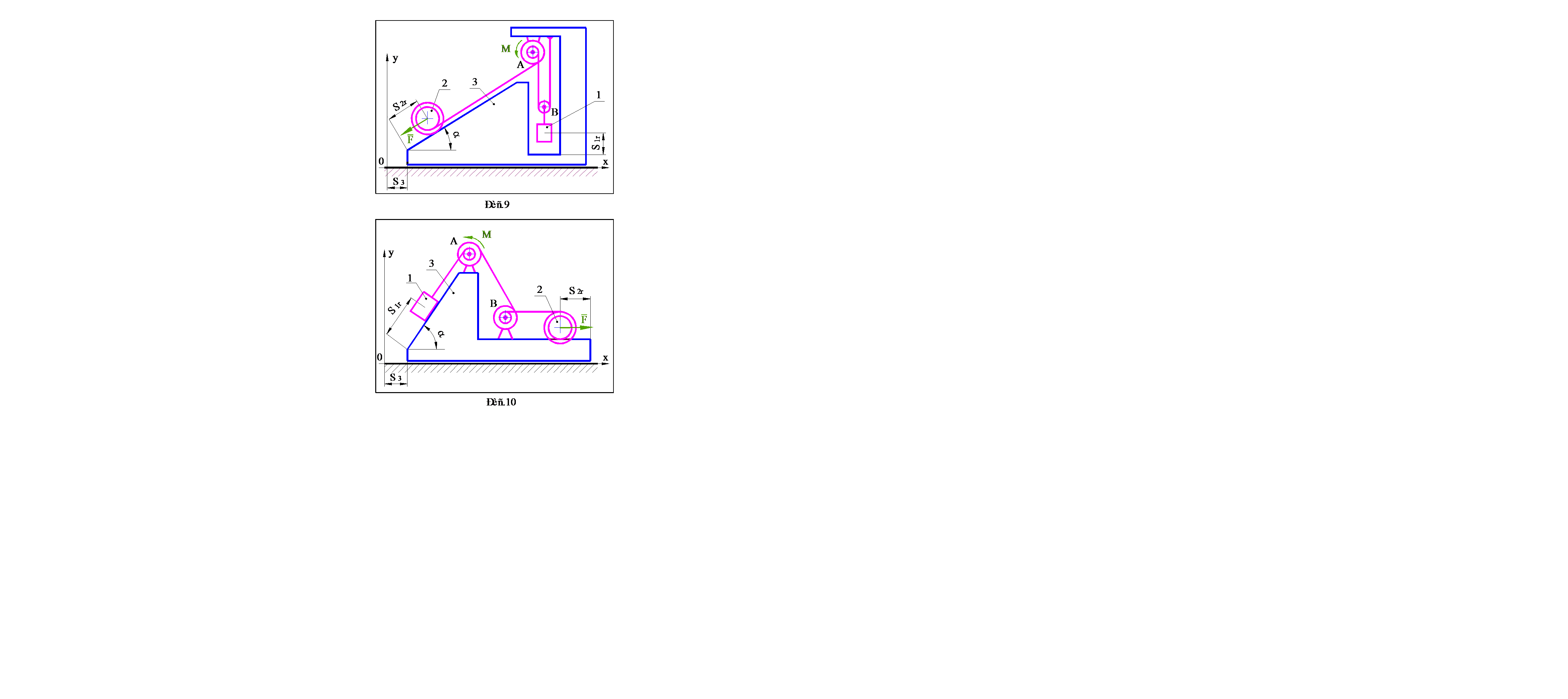
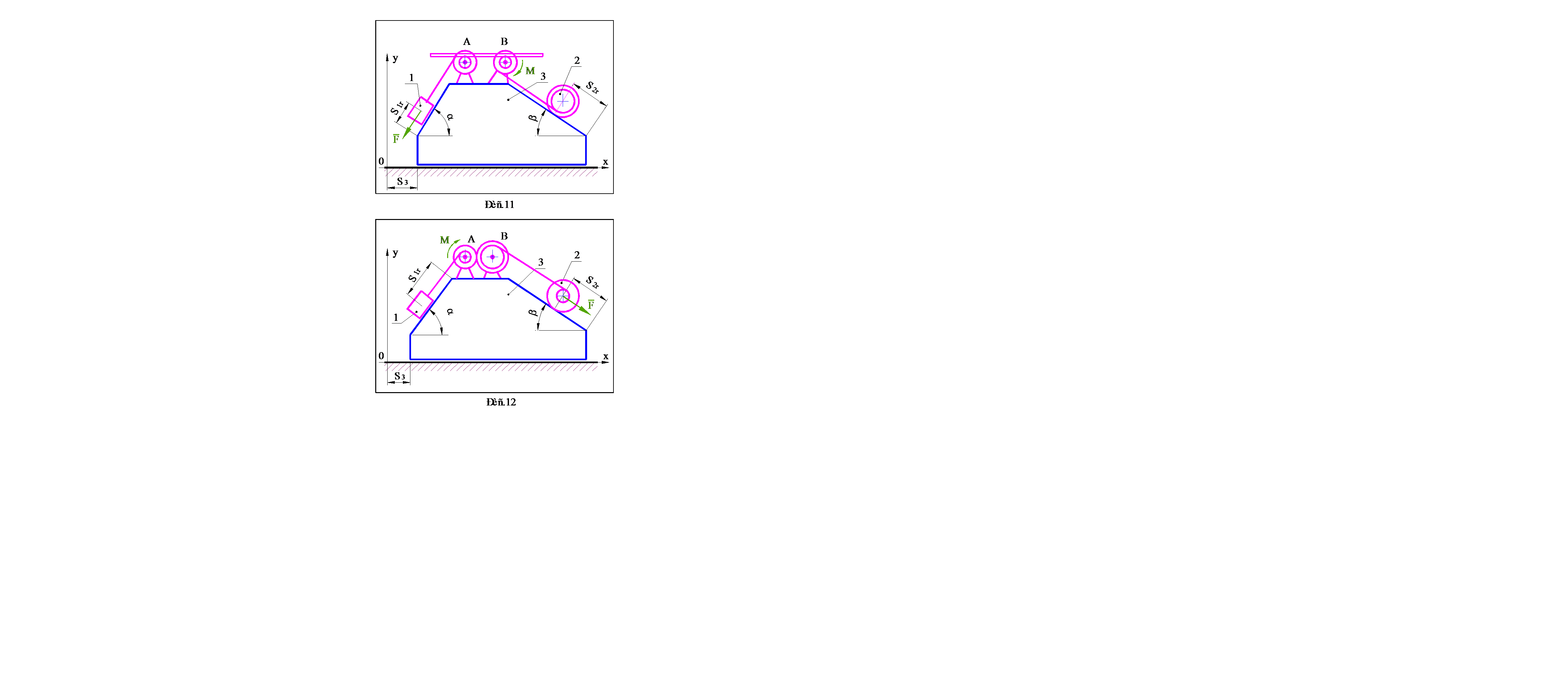
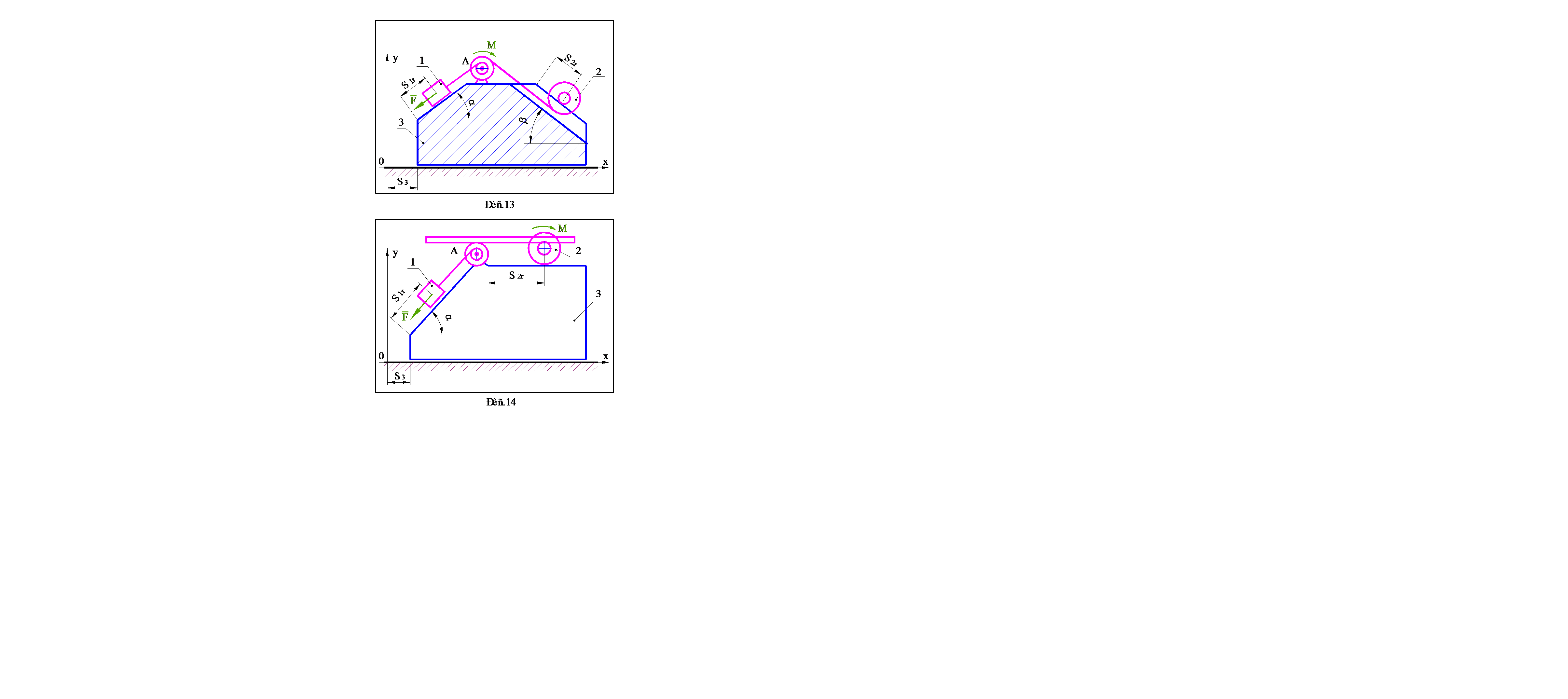
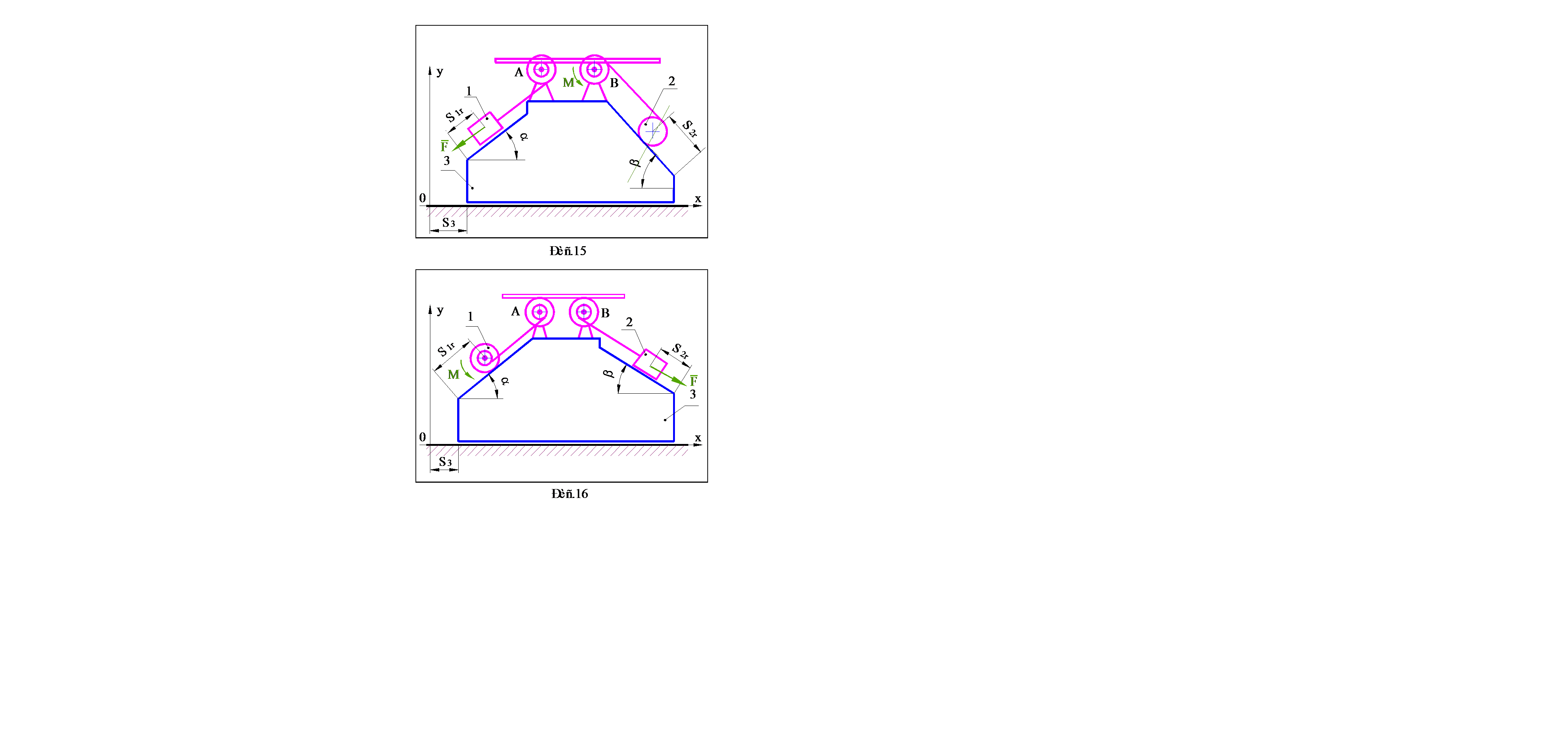
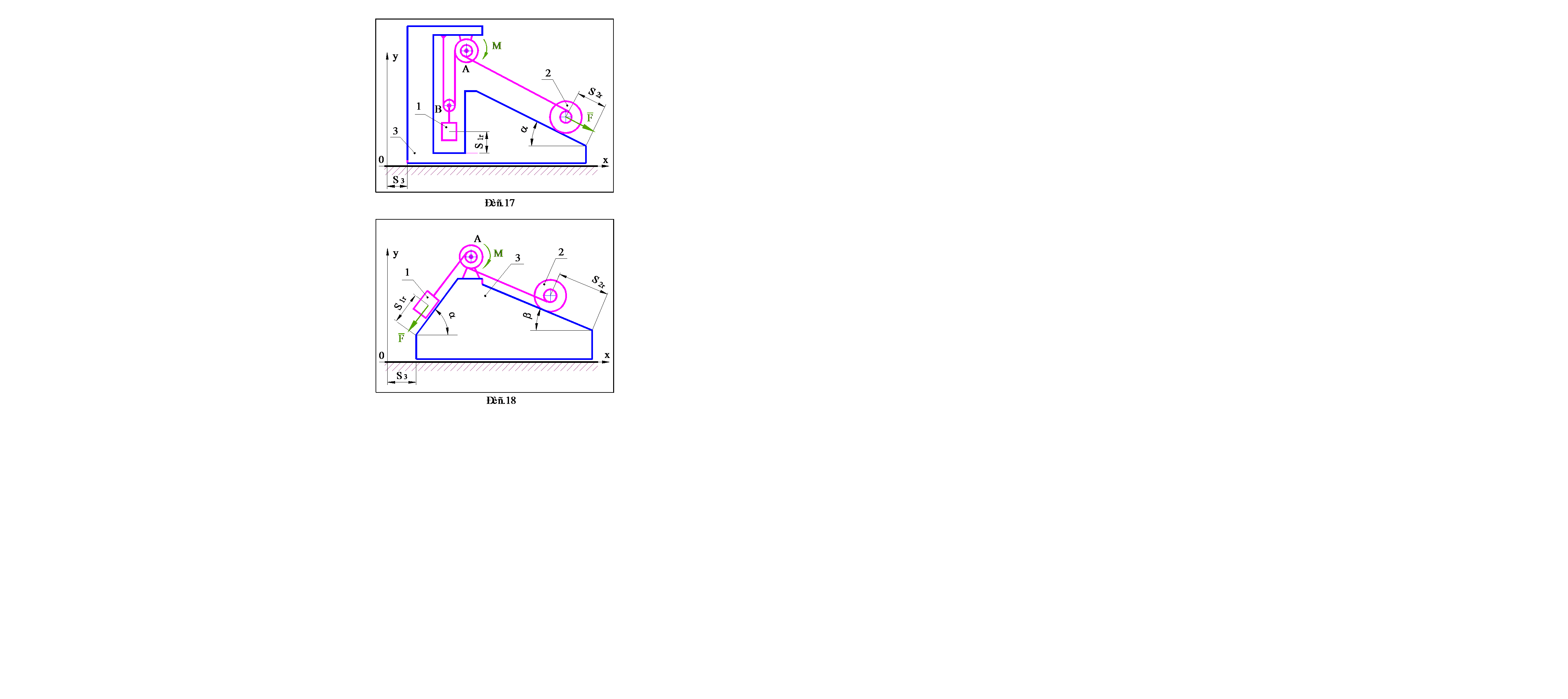
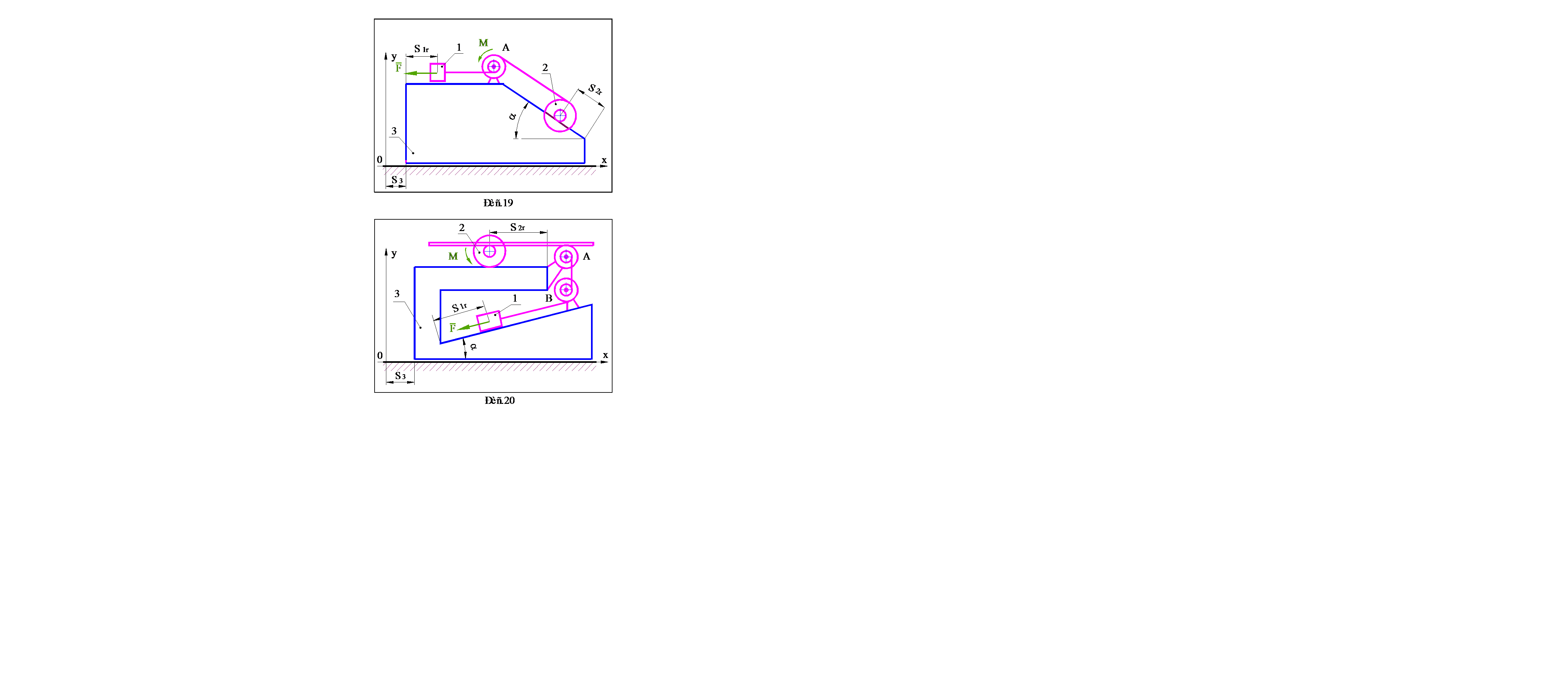
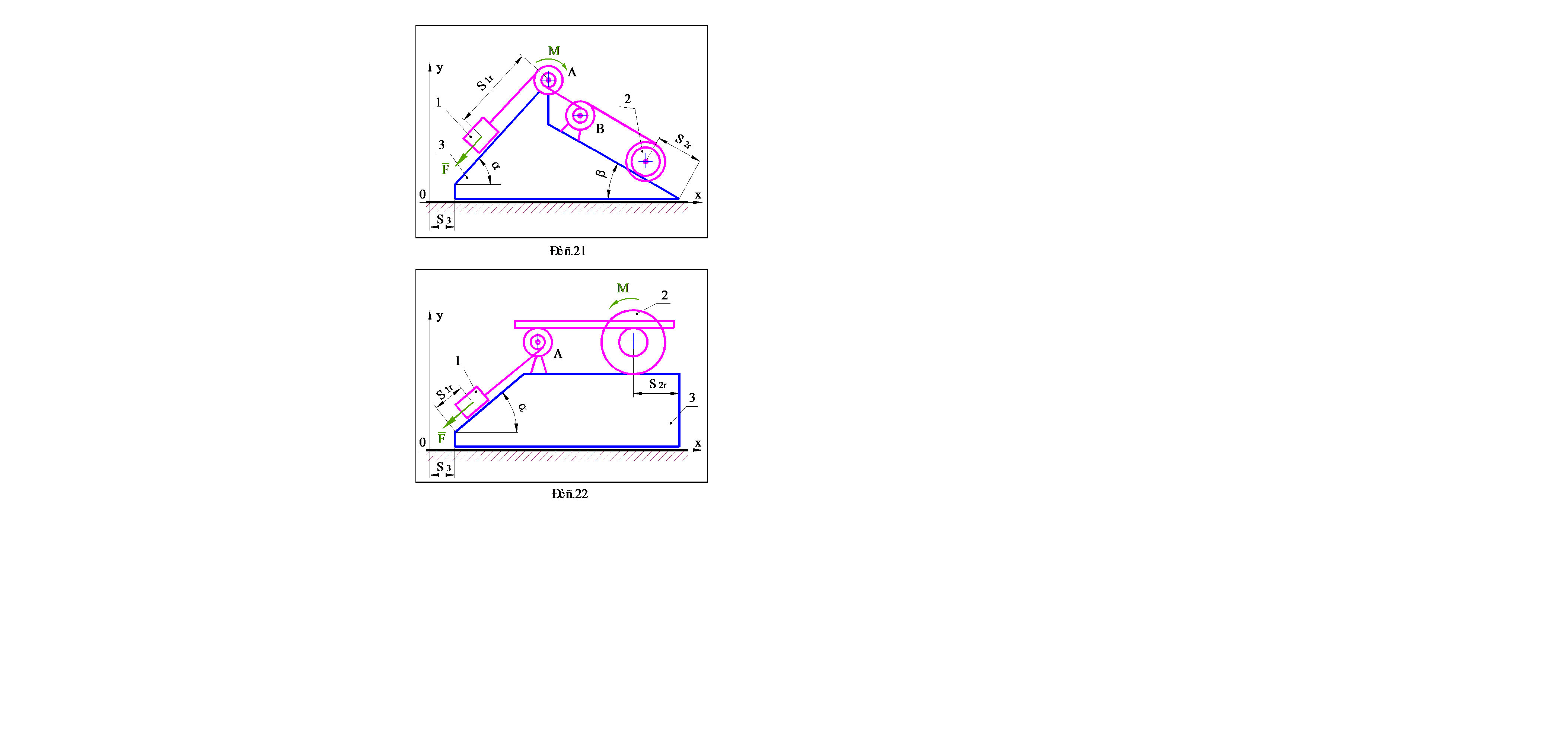
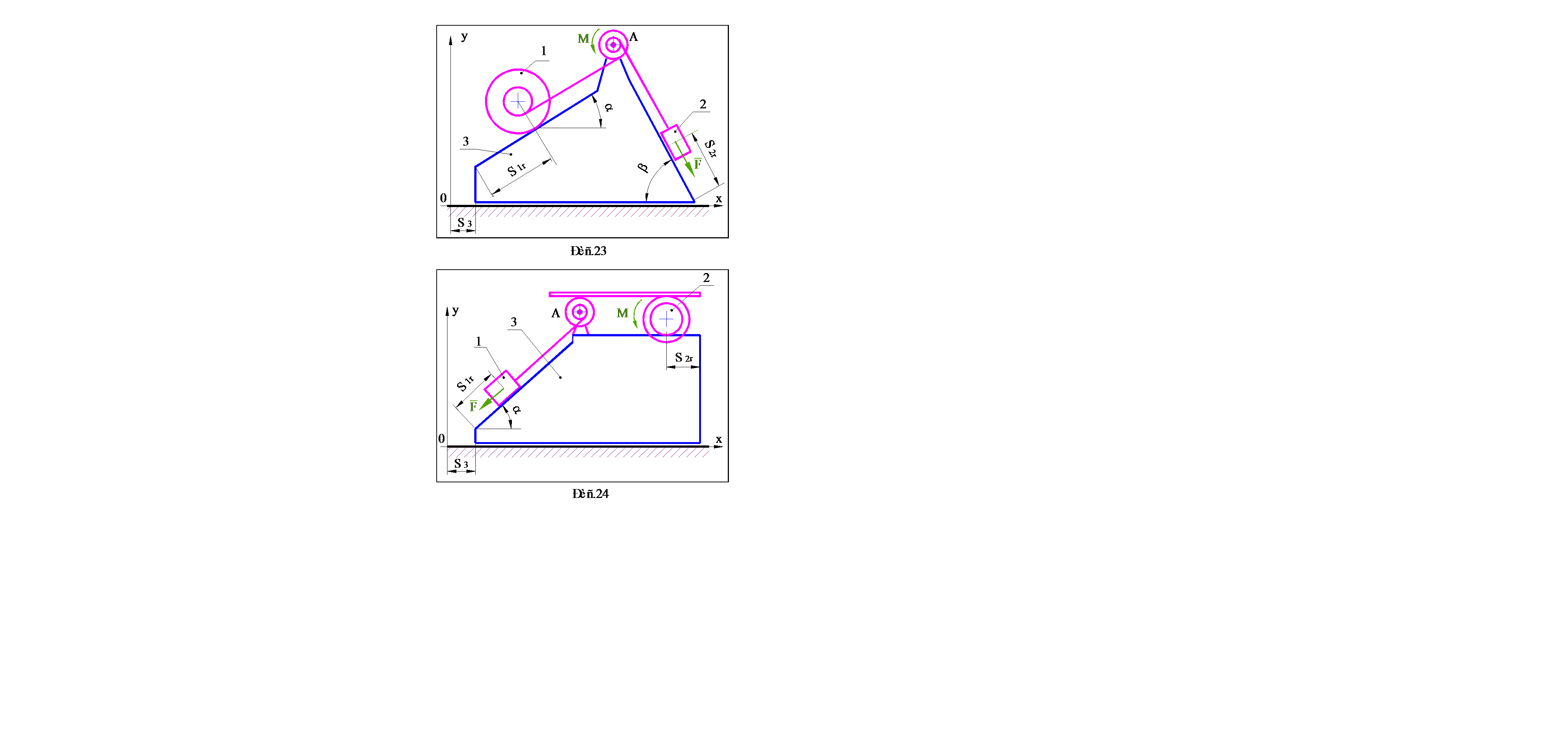
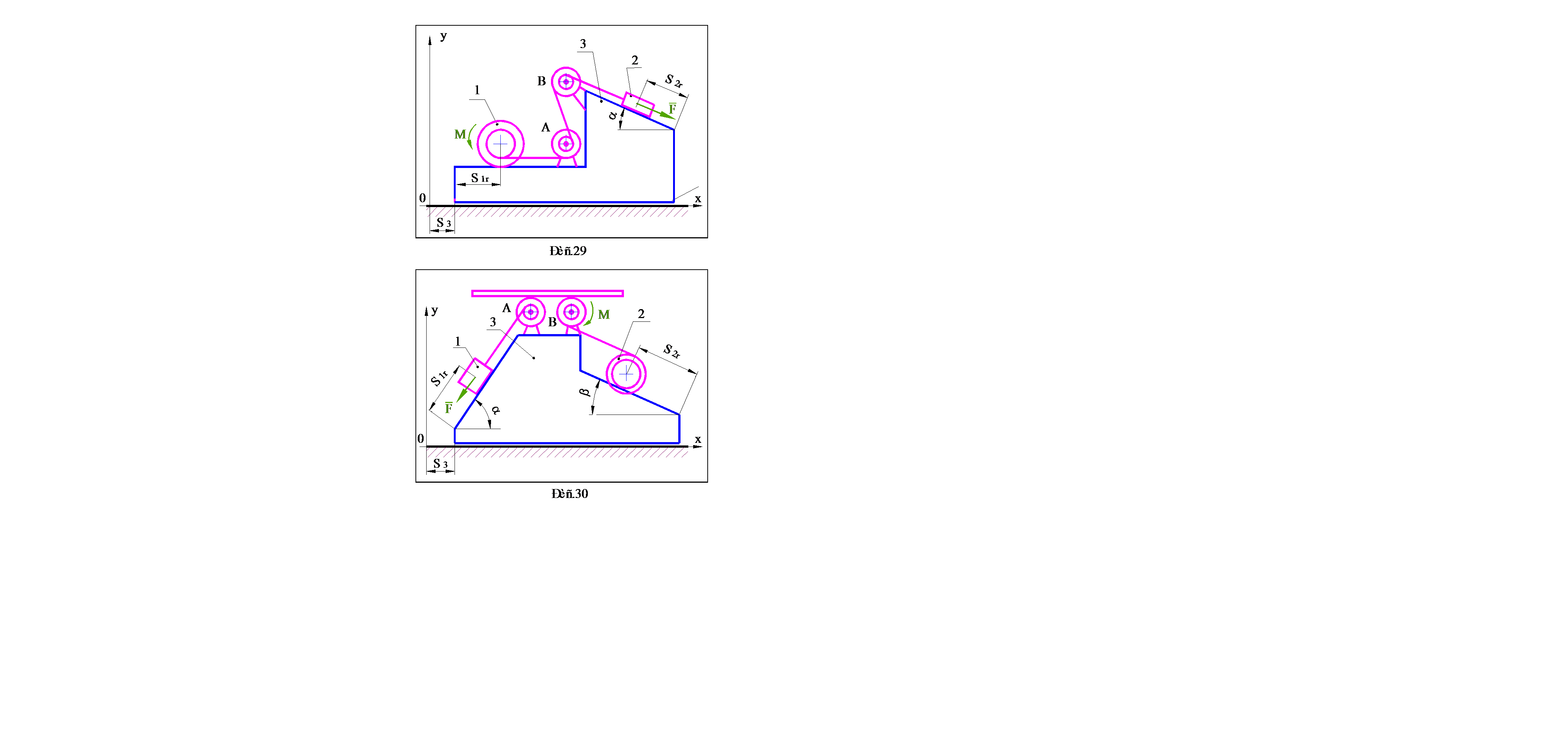
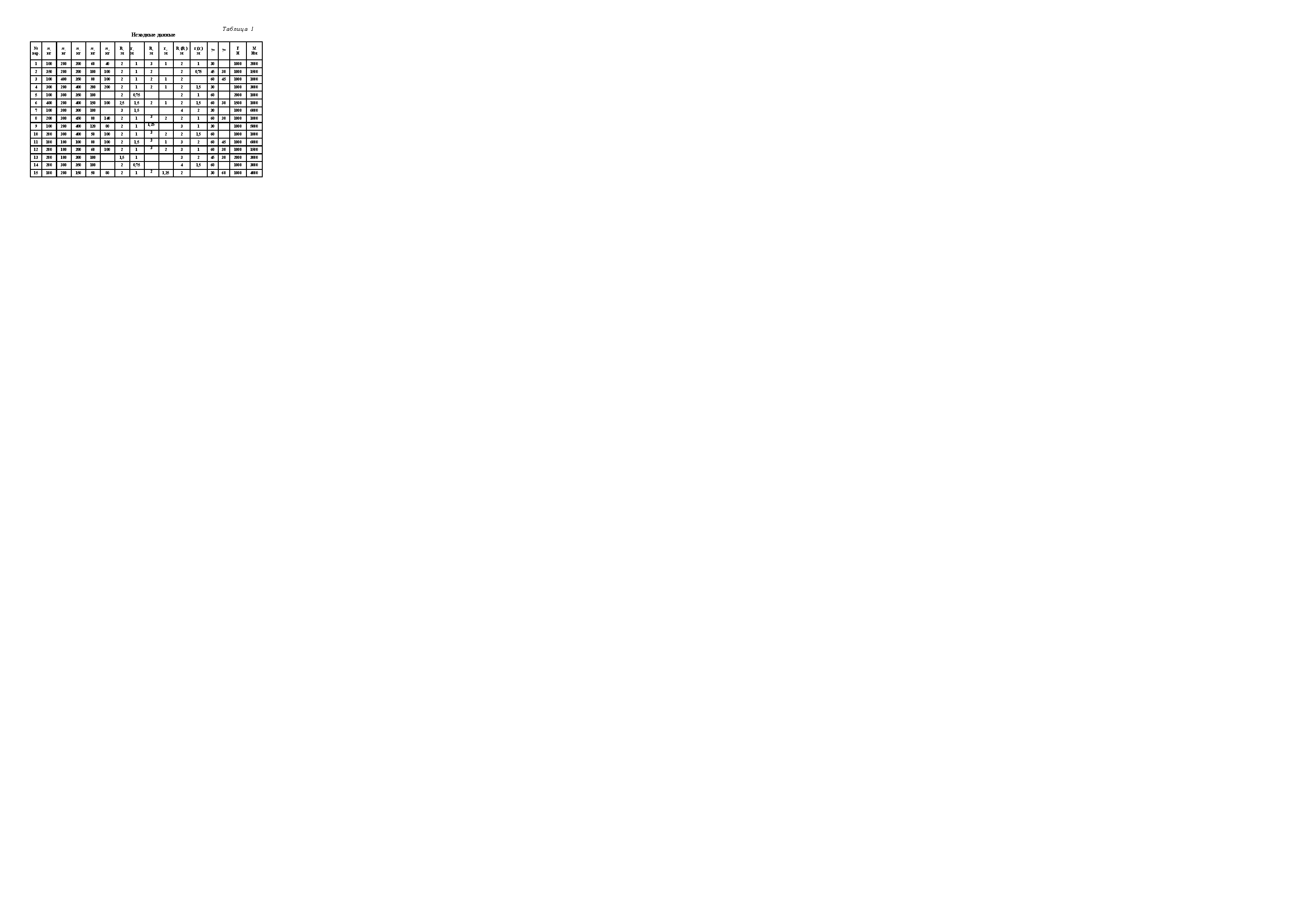
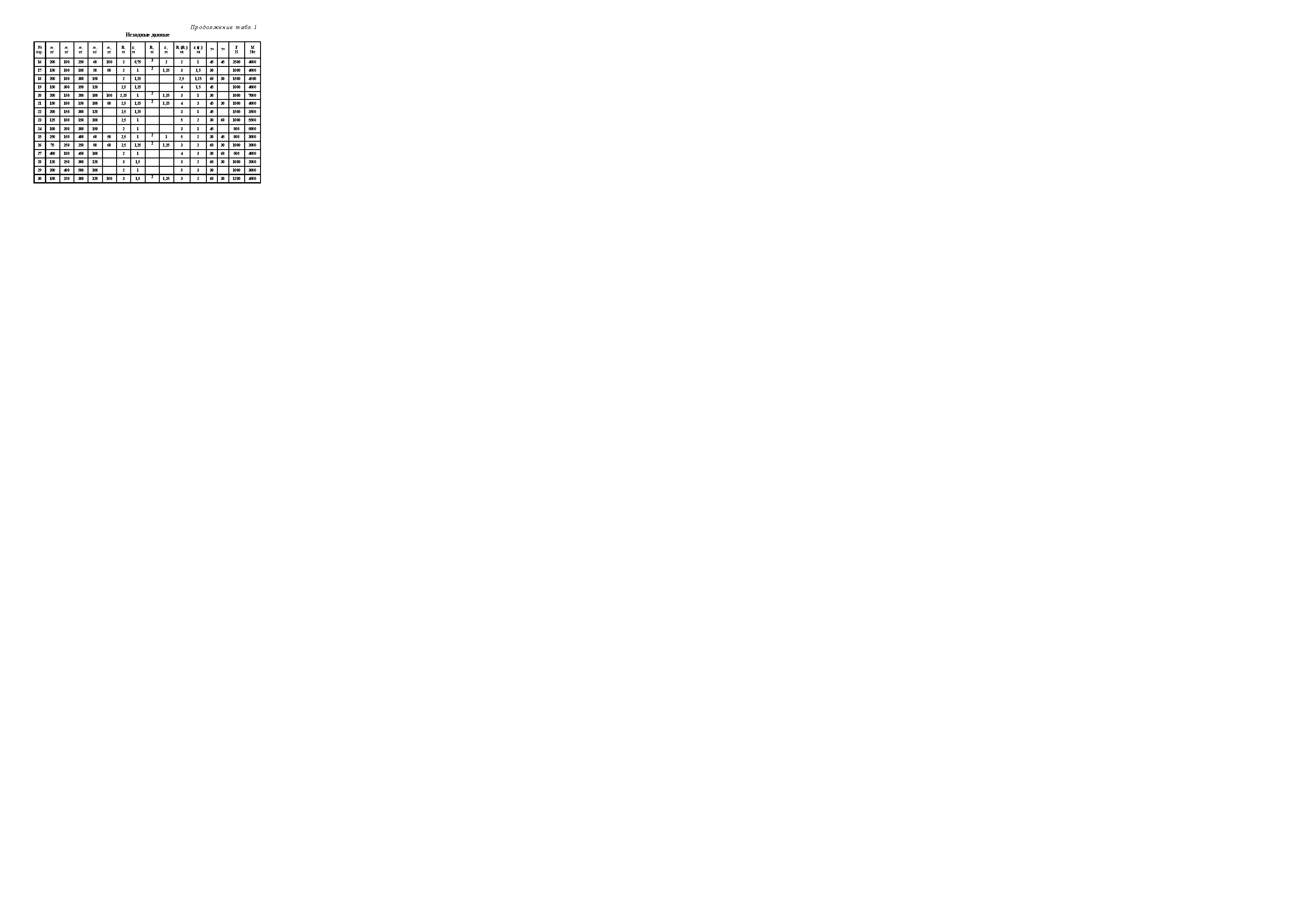
Варианты заданий выдаются преподавателем. Схемы механических систем представлены на рис.1–30, номера которых соответствуют номерам вариантов. Исходные данные, необходимые для решения, содержатся в таблице 1 (стр.31–32). Параметры, подлежащие определению, указываются в разделе 4, в котором приведена методика выполнения работы.
При решении задач учесть следующее:
· При выполнении пунктов 4.1 - 4.3, механической системой считать расположенную на идеально гладкой поверхности призму 3 и находящиеся на ней блоки A и B, а также тела 1 и 2, одно из которых скользит по поверхности призмы, а второе (каток) катится без проскальзывания. Движение системы считать происходящим только за счет сил тяжестей тел, составляющих систему, а показанные на рисунках силу F и момент M исключить.
· При выполнении пунктов 4.4 - 4.8, в качестве механической системы рассматривать тела, находящиеся на призме, а саму призму считать неподвижным основанием. Помимо сил тяжестей тел учитывать действие силы F и момента M .
· Радиусы инерции блоков и катков вычислять по формуле  ;
;
· Коэффициент трения качения для катка определять как  ;
;
· Каток катиться без проскальзывания, коэффициент трения сцепления катка подлежит определению при решении задачи;
· Коэффициент трения скольжения тела (1 или 2), которое движется по призме 3 поступательно, принять f = 0,1;
· Нити невесомы и нерастяжимы;
· Зубчатые рейки невесомы.



| <== предыдущая страница | | | следующая страница ==> |
| Общее уравнение динамики | | | Методика выполнения курсовой работы |
Дата добавления: 2014-12-09; просмотров: 439; Нарушение авторских прав

Мы поможем в написании ваших работ!