Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Тестовые задания для самоконтроля. 1. Основой метода динамического программирования является
1. Основой метода динамического программирования является:
A) принцип максимума Понтрягина
Б) принцип Р. Беллмана
В) принцип оптимальности
Г) ответ первый неверен
Д) ответ второй и третий верен
2. Необходимое условие оптимальности применяемое при расчете оптимальных процессов и систем является:
A) принцип максимума Понтрягина
Б) принцип Р. Беллмана
В) принцип оптимальности
Г) принцип экстремума
Д) все ответы верны
3. Критерием оптимальности системы управления называется:
A) качественная оценка оптимизируемого качества объекта
Б) объективная оценка оптимизируемого качества объекта
В) субъективная оценка оптимизируемого качества объекта
Г) количественная оценка оптимизируемого качества объекта
Д) рациональная оценка оптимизируемого качества объекта
4. Метод динамического программирования позволяет решать задачи скольких видов:
А) 5
Б) 4
В) 3
Г) 2
Д) 1
5. Метод динамического программирования позволяет решать какие задачи
А) дискретную,
Б) дискретно-непрерывную
В) непрерывную.
Г) все ответы верны
Д) все ответы неверны
11.1.5. Лекция 5. Тема. Энергетические соотношения при управлении, оптимальном по быстродействию.
Задача поиска оптимальных законов управления для конкретных объектов.
Работа объекта управления при определенном, например номинальном, режиме возможна только тогда, когда энергия, запасенная в нем, соответствует этому режиму. Например, работа двигателя с постоянной скоростью w=wH возможна только тогда, когда кинетическая энергия, запасенная в его вращающих массах, соответствует этой скорости. Если такого соответствия нет, то координата системы w будет изменяться.
Увеличивая подводимую мощность, можно ускорять процесс изменения запасенной энергии в системе и тем самым ускорять изменение управляемых координата до заданного значения. Однако увеличение мощностью ограничено возможностями объекта управления, а также мощностью источника питания. Следовательно, задача состоит в поиске оптимальных законов управления для конкретных объектов.
Пусть объект описывается линейным дифференциальным уравнением первого порядка (например, обмотка возбуждения электрической машины постоянного тока).
Ту+у=ки,
где Т- постоянная времени; к- коэффициент усиления
Решение этого уравнения при скачкообразном измени управляющего воздействия и=и0*1[t] (рис.2.1.а ) и нулевых начальных условиях имеет вид
y(t)=ku0(1-e-i/T).
a ) и
0 t
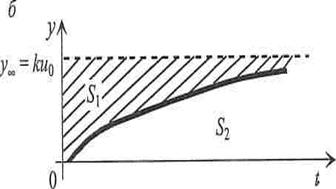
рис.2.1.
Зависимость у(t) представлена на рис.2.1,б. Можно показать, что заштрихованная площадь S1 пропорционалы на количеству энергии, запасенной в системе. Например, если к источнику напряжения U=U0 подключается электрическая цепь R-L,то
S1=  ,
,
Где i(t)=i  (1-e-i/T). i =U0/R; T=L/R.
(1-e-i/T). i =U0/R; T=L/R.
С другой стороны, количество энергии А, запасенной в индуктивности L, равно
A= 
Так как, U0=const,то величина А пропорциональная площади S1 .При этом площадь S2 пропорциональна полезной работе, совершаемой на активном сопротивлении R.
| <== предыдущая страница | | | следующая страница ==> |
| Метод динамического программирования | | | Форсировка переходного процесса |
Дата добавления: 2015-07-26; просмотров: 237; Нарушение авторских прав

Мы поможем в написании ваших работ!