Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Форсировка переходного процесса
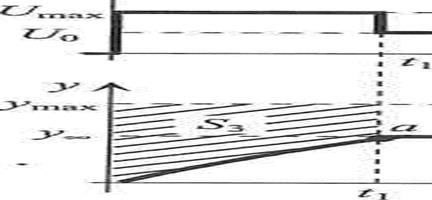
Форсировку переходного процесса можно получить, увеличивая подводимое напряжение (управляющее воздействие) до U=Umax (рис.2.2,a).Если в момент достижения у=у  (точка а) уменьшить U до U0, то управляемая координата у сразу примет установившееся значение у (рис.2.2,б).Это обусловлено тем, что количество энергии, запасенное к моменту времени t1, равно тому, которое необходимо для работы в установившемся режиме у=у ,так как можно доказать, что S3=S1.По истечении интервала t1 управление прекратить нельзя, его нужно поддерживать на уровне U0 чтобы удерживать у=у .
(точка а) уменьшить U до U0, то управляемая координата у сразу примет установившееся значение у (рис.2.2,б).Это обусловлено тем, что количество энергии, запасенное к моменту времени t1, равно тому, которое необходимо для работы в установившемся режиме у=у ,так как можно доказать, что S3=S1.По истечении интервала t1 управление прекратить нельзя, его нужно поддерживать на уровне U0 чтобы удерживать у=у .
 a)
a)
б)
рис.2.2.
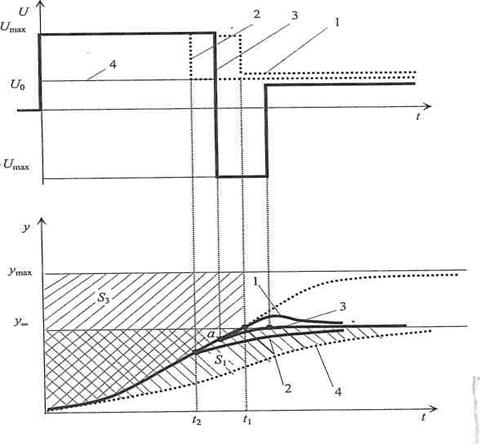
В случае, если объект является апериодическим звеном второго порядка (например, электрическая цепь R-L-C ),то описанный порядок управления (рис2.3,а ступенчатая функция 1 ) не приводит к равенству площадей S1 и S3 (рис.2.3,б кривая 2).
а)
б)
рис.2.3.
Можно показать, что при любых параметрах объекта S3>S1.
Это приводит к избытку запасенной энергии, а переходной процесс будет происходить с перерегулированием (рис.2.3,б,кривая 1).В случае, если производить переключение несколько ранее, в момент t2,соответствующий равенству S1=S3, то при этом координата y<y переходной процесс будет продолжаться (рис.2.3,кривая 2).Траектории 1 и 2 не являются оптимальными, хотя обеспечивают большее быстродействие по сравнению с переходным процессом, полученным при отсутствии форсировки (кривая 4).
Управление координатой у можно осуществить и другим путем. Дадим объекту запас энергии несколько больший, чем требуется при режиме y=y .При подходе к (точка а) отнимем этот излишек путем подачи отрицательного управления U=-Umax.К моменту окончания управления энергия и координата должны быть равны заданным значениям (рис.2.3,кривая 3).При этом переходной процесс является оптимальным и заканчивается за конечное время. Таким образом, для оптимального управления объектом, описываемым дифференциальным уравнением второго порядка, управление должно один раз менять знак.
| <== предыдущая страница | | | следующая страница ==> |
| Тестовые задания для самоконтроля. 1. Основой метода динамического программирования является | | | Теорема об интервалах или (n-1) переключениях |
Дата добавления: 2015-07-26; просмотров: 283; Нарушение авторских прав

Мы поможем в написании ваших работ!