Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя (рис. 4.10) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности соsφ и тока статора I1, от полезной мощности Р2 при U1 = const и f1 = const.
Скоростная характеристика n2 =f(Р2). Частота вращения ротора асинхронного двигателя
n2=n1(1-s)
Скольжение по (4.5) 
s = Pэ2/Pэм, (4.11)
т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода можно принять Рэ2=0
а поэтому s0 ≈ 0 и n20 ≈ n1 По мере увеличения нагрузки на валу двигателя отношение (4.11) растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 =f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2 возрастают электрические потери в роторе.
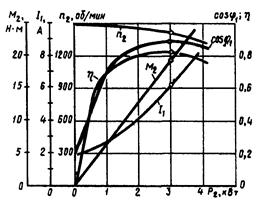
Рис. 4.10. Рабочие характеристики асинхронного двигателя
Зависимость M2 = f(Р2) Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2
определяется выражением
M2=P2/ω2 = 9,55Р2/n2, (4.12)
где Р2 — полезная мощность, Вт; n2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график M2 = f(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
Зависимость cos φ1 =f(P2) В связи с тем что ток статора I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х. I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора I1, относительно напряжения U1 получается значительным, лишь немногим меньше 90°. Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением соsφ1, что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда, или значительную часть времени, с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя.
| <== предыдущая страница | | | следующая страница ==> |
| Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора | | | Способы пуска в ход асинхронного двигателя |
Дата добавления: 2014-04-17; просмотров: 319; Нарушение авторских прав

Мы поможем в написании ваших работ!