Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
РОБОТЫ И МАНИПУЛЯТОРЫ
|
Читайте также: |
Роботы – класс машин-автоматов, способных в процессе работы воспроизводить двигательные и определенные интеллектуальные функции человека.
Манипулятор робота – исполнительное устройство в виде многозвенного механизма, оснащенного приводом и рабочим органом, и выполняющее движения, аналогичные функциям руки человека при перемещении объектов в пространстве.
По характеру работ промышленные роботы подразделяются на три группы:
1. Технологические роботы выполняют основные операции технологического процесса (например: гибка, сварка, окраска, сборка и т.п.).
2. Вспомогательные роботы выполняют действия типа «взять – принести - положить».
3. Универсальные роботы выполняют как основные, так и вспомогательные технологические операции.
По степени специализации: на специальные (выполняют определенную технологическую операцию), специализированные (операции одного вида: окраска, сборка и т.д) и многцелевые.
Рабочие органы роботов (манипуляторов) в основном выполнены в виде захватных устройств (захватывают изделие или инструмент: пистолеты для окраски, шлифовальные и сверлильные инструменты).
Приводы роботов бывают электромеханические, гидравлические, пневматические и комбинированные.
Информационная система роботов, следящая за работой механизмов и внешней средой, состоит из аппаратных и программных средств (различных датчиков-преобразователей, релейных устройств, микропроцессорных устройств и т.п.)
Автоматическое управление и выполнение заданных операций роботом обеспечивается системой программного управления.
Напольные роботы с горизонтальной выдвижной рукой предназначены для выполнения простых транспортно-разгрузочных операций.


    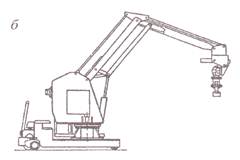
| Рис Передвижной манипуляционный робот: 1 – ходовая аккумуляторная тележка, 2 - поворотная часть, 3 – шарнирно - сочлененная стрела, 4 – рычажно-тяговые механизмы, 5 - направляющий модуль, 6 - захват, 7 – гидроцилиндр выдвижения стрелы.
Погрешность позиционирования  (отклонение конечной точки манипулятора от заданного положения).
Грузоподъемность различных моделей в пределах до 800кг. (отклонение конечной точки манипулятора от заданного положения).
Грузоподъемность различных моделей в пределах до 800кг.
| ||||||||||||||
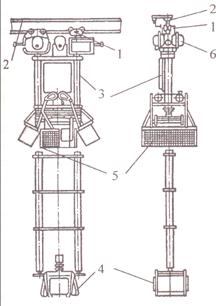
| Подвесные транспортные роботы используются для транспортирования деталей и изделий. Некоторые из них выполняются в виде тельферной тележки на монорельсе с подъемником и автоматическим захватом. Они по командам захватывают груз, транспортируют его и ставят на другую позицию. Подвесной транспортный робот: 1 – тележка, 2 – монорельс, 3 – направляющая, 4 – захват автоматический, 5 – сетка защитная от падения, 5 – электродвигатель, 6 – телескопические тяги. Грузоподъемность до 250кг. | ||||||||||||||
Транспортные роботыизготавливаются в виде автоматических тягачей-тележек. Применяются для буксировки транспортных средств и перевозки грузов в кузове, некоторые могут осуществлять саморазгрузку с помощью манипулятора.
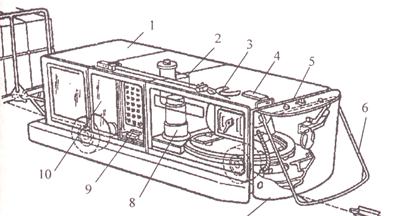 Рис Транспортный робот: 1 – тележка с аппаратурой (тормозная катышка, транзисторное устройство, аккумуляторная батарея и др.), 2 – пневмоколесное шасси, 3 – кабель, 4 – буксируемое средство.
Рис Транспортный робот: 1 – тележка с аппаратурой (тормозная катышка, транзисторное устройство, аккумуляторная батарея и др.), 2 – пневмоколесное шасси, 3 – кабель, 4 – буксируемое средство.
| Транспортные роботы в основном двигаются по замкнутой трассе. По кабелю вдоль трассы подают электрический переменный ток, в результате вокруг него образуются магнитные силовые линии, воздействующие на датчики робота. Посредством изменения частоты переменного тока осуществляют торможение и поворот, изменяют скорость и направление движения. |
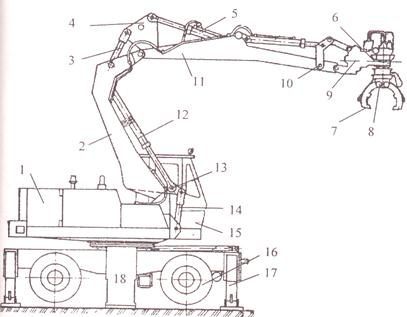
| Строительный манипулятордля работы в стесненных условиях: 1 – поворотная часть (силовое и рабочее оборудование, кабина), 2 – плечо, 3,4,13,14 – рычажно-тяговые механизмы, 4 – рычаг, 5,12 – гидроцилиндры, 7 – захват, 11 – стрела, 15 – кабина, 16-18 – опорно-ходовое устройство. Рабочие органы: гидротрамбовки, ковши, различные захваты и т.п. Управление автоматизированное (часть операций выполняется автоматически и часть с помощью оператора). Применение: при устройстве сетей водоснабжения для копания траншей и приямков, укладки труб и их стыковки, уплотнения грунта. |
| <== предыдущая страница | | | следующая страница ==> |
| Оборудование для отделки полов | | | Лекция №25 Патофизиология почек |
Дата добавления: 2014-05-04; просмотров: 350; Нарушение авторских прав

Мы поможем в написании ваших работ!