Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Корреляционные лаги
|
Читайте также: |
Корреляционные лаги так же, как и доплеровские, могут измерять абсолютную и относительную скорость судна. Кроме того, они могут измерять глубину под килем судна. При этом диапазоны рабочих и измеряемых глубин в отдельных модификациях корреляционных лагов могут изменяться от 3 до 300 м.
(Корреляция — взаимное соответствие функций, предметов и пр.).
Корреляционные лаги основаны на использовании современной элемен-
тной базы, имеют хорошие технические характеристики, способны измерять
продольную и поперечную составляющие линейной скорости судна.
Принцип действия гидроакустического корреляционного лага основан на измерении временного сдвига между акустическими сигналами, излученными с движущегося судна, отраженными от морского дна и принятыми антеннами, разнесенными в направлении движения.
Рассмотрим принцип действия корреляционного лага для случая измерения только одной (продольной) составляющей вектора скорости (рис. 2.10).
В диаметральной плоскости судна расположены три разнесенные антенны. При этом антенна 3 отстоит от принимающих антенн 1 и 2 на одно и то же расстояние  . Диаграммы направленности антенн одинаковы, ориентированы вертикально вниз и взаимоперекрываются.
. Диаграммы направленности антенн одинаковы, ориентированы вертикально вниз и взаимоперекрываются.
Поверхность морского дна можно рассматривать как совокупность большого числа случайно распределенных элементарных отражателей.
Поэтому в точке приема акустический сигнал представляет собой сумму независимых элементарных сигналов, отраженных от отдельных отражателей, со случайными начальными фазами и амплитудами.
Допустим в момент времени t – t1tt(рис. 2.10, а) излучающая антенна в числе прочих облучает и элементарный отражатель О1 . Эхо-сигнал от отра-
жателя О1 принимается антеннами 1 и 2.
Антенна 1 примет сигнал, амплитуда и фаза которого будут определяться геометрией лучей R11 и R13 . Очевидно, что при движении судна излучающая антенна 3 в какой-то момент времени t = t1 +  т окажется в положении, которое ранее в момент t1 занимала антенна 1 (рис. 2.10, б).
т окажется в положении, которое ранее в момент t1 занимала антенна 1 (рис. 2.10, б).
Нетрудно заметить, что геометрия лучей R'12 и R'13 совпадает с гео-
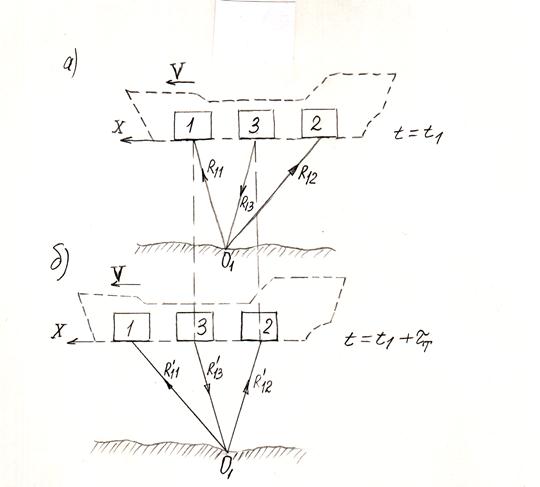
Рис. 2.10
метрией лучей R11 и R13. Только направление распространения сигналов другое. Но это не приводит к изменению амплитуды и фазы принимаемого сигнала.
Поскольку все это справедливо для любого другого элементарного отражателя Оn , до которого доходит излучаемый с судна сигнал, спектр сигнала, принимаемого задней по ходу движения антенной 2 в момент времени
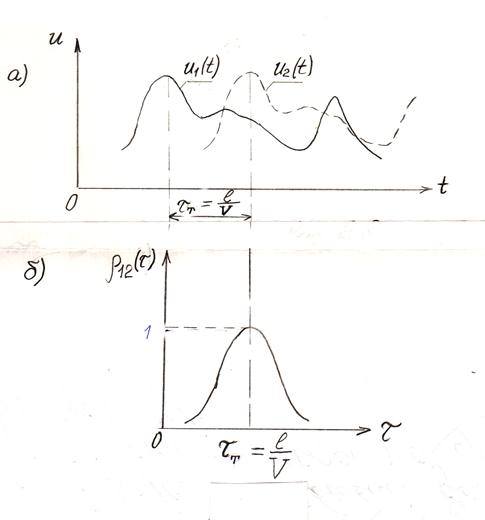
t = t1 + т будет такой же, как и спектр сигнала принятого передней антенной 1 в некоторый предыдущий момент времени t1. Поэтому сигнал и2 (t) антенны 2 повторяет форму сигнала и1 (t) антенны 1, но отстает от него во времени (рис. 2.10, а).
Это отставание равняется времени, за которое судно пройдет расстояние :  т =
т =  , где
, где  — скорость судна.
— скорость судна.
 Откуда
Откуда
 = / т . (2.25)
= / т . (2.25)
Временнóй сдвиг т называется транспортным запаздыванием.
Таким образом, найдя временной сдвиг сигналов принятых разнесенными приемными антеннами лага легко определить скорость судна.
Из формулы (2.25) видно, что значение измеренной скорости судна не зависит от скорости распространения звука в воде. В этом преимущество корреляционных лагов по сравнению с радиодоплеровскими.
Нахождение этого временнóго сдвига осуществляется путем корреляционной обработки принятых сигналов.
Для этого в тракт сигнала передней антенны 1 вводится переменная временнáя задержка, производится вычисление взаимнокорреляционной функции огибающих сигналов разнесенных антенн (см. рис. 2.11, а) и находится максимальное значение этой функции. Соответствующая временнáя задержка и есть искомое т.
Выше упомянутая взаимнокорреляционная функция для двух рассматриваемых сигналов может быть представлена в следующем виде:
K12( ) = 1/Т  и1 (t – з) и2 (t) d t,
и1 (t – з) и2 (t) d t,
где и1 (t) и и2 (t) — огибающии сигналов, принятых разнесенными антеннами 1 и 2;
Т — время интегрирования;
з — задержка, вводимая в тракт сигнала и1 (t).
Учитывая, что и2 (t)  и1 (t – т), можно записать
и1 (t – т), можно записать
K12( ) = 1/Т  и1 (t – з) и2 (t – т) d t = A11(
и1 (t – з) и2 (t – т) d t = A11(  ),
),
PP Рис. 2.11
где A11( ) — автокорреляционная функция сигнала;

 = з - т.
= з - т.
Максимум автокорреляционной функции наблюдается при выполнении условия
= з - т = 0 или з = т = .
Для характеристики связи между сигналами часто переходят к нормированной взаимнокорреляционной функции — коэффициенту взаимной корреляции. Он может принимать значения от 0 до 1.
K12( )

 12( ) =
12( ) =  1
1  2 ,
2 ,
где 1 и 2 — среднеквадратические отклонения сигналов.
В отсутствие сноса (рис. 2.11, б) коэффициент взаимной корреляции огибающих сигналов приемных антенн приближенно может быть описан выражением

 = exp [-
= exp [- 
 ], (2.25)
], (2.25)
где 
 — эффективная ширина диаграммы направленности антенн;
— эффективная ширина диаграммы направленности антенн;
 — длина волны излучаемого сигнала.
— длина волны излучаемого сигнала.
В корреляционных лагах может быть использовано как непрерывное, так и импульсное излучение.
При непрерывном режиме излучения необходимо использование отдельных антенн для излучения и приема сигналов. Другой недостаток (такой же, как в доплеровском лаге) существенное уменьшение рабочей глубины из-за сильного влияния объемной реверберации. Кроме того, акустическая развязка антенн также связана с определенными трудностями.
В качестве антенн направленного действия используют пьезокерамические вибраторы. Чаще всего пьезокерамические вибраторы монтируют в одном антенном блоке. Впрочем, также делают и в доплеровских лагах.
Число вибраторов зависит от тех задач, которые обязан решать лаг.
Так, если нужно измерять только продольную составляющую скорости судна, достаточно и двух антенн, смонтированных вдоль диаметральной плоскости в едином антенном блоке. Такая конструкция, например, была использована в одной из первых моделей корреляционного лага SAL – ACCOR (Speed Automatic Log – Acoustic Correlation), шведской фирмы “Jungner Instrument”.
Основные технические характеристики этого лага: диаграмма направленности каждого вибратора  30о (т.е. довольно широкая); расстояние между вибраторами 3 см; рабочая частота 150 кГц; рабочая глубина до 200 м. На больших глубинах лаг автоматически переходит в режим относительного измерения.
30о (т.е. довольно широкая); расстояние между вибраторами 3 см; рабочая частота 150 кГц; рабочая глубина до 200 м. На больших глубинах лаг автоматически переходит в режим относительного измерения.
Для измерения продольной и поперечной составляющих нужно как минимум 3 принимающих антенны. В корреляционном лаге SAL – 860, предназначенном для измерения абсолютной и относительной скорости, в антенном блоке расположены 7 вибраторов, 5 из них для передачи и приема отраженных от дна сигналов, 2 — для измерения относительной скорости по сигналам объемной реверберации.
Для первой группы вибраторов: частота — 150 кГц; рабочая глубина 3 – 300 м; продольная скорость от -8 до +40 узл.; поперечная — до 8 узл. в сторону любого борта.
Для 2 оставшихся — частота — 4 МГц; скорость — от 0 до 40 узл. Сигналы отражаются от слоя на глубине 60 – 120 м.
Для отображения полученной информации в корреляционных лагах используют цифровые, цифроаналоговые и аналоговые репитеры.
| <== предыдущая страница | | | следующая страница ==> |
| Устройство и основные погрешности доплеровского лага | | | Индукционные лаги |
Дата добавления: 2014-08-04; просмотров: 1679; Нарушение авторских прав

Мы поможем в написании ваших работ!