Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Индукционные лаги
|
Читайте также: |
3.1. Принцип действия индукционного лага
В основу работы индукционных лагов положен закон электромагнитной индукции, сформулированный Фарадеем в 1831 г. Он гласит: э.д.с. электромагнитной индукции Е в проводящем контуре численно равна и противоположна по знаку скорости изменения магнитного потока Ф сквозь поверхность, ограниченную этим контуром:
Е = – dФ/dt, (3.1)
где Ф — магнитный поток (Ф = ВS, здесь В — магнитная индукция, S — площадь перпендикулярная силовым линиям магнитного потока.
Явление электромагнитной индукции возникает и в морской воде при ее движении относительно магнитного поля.
Нарисуем конструкцию индукционного первичного преобразователя скорости (ИППС) или просто индукционного преобразователя (ИП) индукционного лага (Рис. 3.1).
В корпусе ИП 1 расположен электромагнит 2, обмотка которого питается переменным током. В результате создается магнитное поле с индукцией В, перемещающееся вместе с судном относительно воды. На торцевой поверхности ИП, установленного с прорезью днища в клинкете, расположены два электрода 3, расстояние между которыми обозначено  , а условная линия их соединяющая перпендикулярна ДП судна.
, а условная линия их соединяющая перпендикулярна ДП судна.
Поскольку электромагнит питается переменным током магнитная индукция
В = Вm sin  t,
t,
где = 2  ƒ — частота питающего тока.
ƒ — частота питающего тока.
В этом случае выражение (3.1) принимает вид
 . (3.2)
. (3.2)
Морскую воду, находящуюся между электродами 3 можно рассматривать как проводник длиной  . Этот проводник при движении судна со скоростью V за некоторое время dt пройдет расстояние Vdt. За это время он пересечет площадь магнитного потока
. Этот проводник при движении судна со скоростью V за некоторое время dt пройдет расстояние Vdt. За это время он пересечет площадь магнитного потока
dS =  Vdt. (3.3)
Vdt. (3.3)
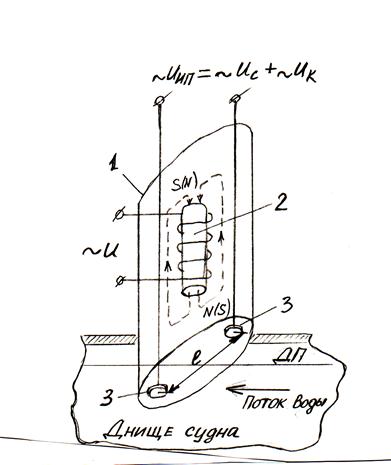
Рис.3.1
Подставив это значение в (3.2), получим
Е = - BmS  cos t - Bm
cos t - Bm  Vsin t. (3.4)
Vsin t. (3.4)
Как видим одна из составляющих, полученного сигнала пропорциональна скорости судна V. Для выделения этой составляющей и получения, в конечном счете, значения V в необходимой форме (аналоговой или цифровой) сигнал с ИППС передается в схему лага, входное сопротивление которой обозначим Rн. Если сопротивление морской воды между электродами обозначить Ri , то эквивалентная схема ИП
Рис. 3.2
Напряжение ~ Uип =  . (3.5)
. (3.5)
Сопротивление Ri зависит от параметров морской воды — солености, температуры и пр. Для исключения влияния связанных с этим погрешностей выбирают Rн >> Ri . С учетом этого можно записать
~Uип = - Bm S  cos t – Bm
cos t – Bm  V sin t (3.6)
V sin t (3.6)
или
~ ~ Uип = ~ Uк + ~ Uc , (3.7)
здесь ~ Uc = k1 V sin t — полезный сигнал, содержащий информацию о скорости судна (k1 = – Bm ).
~ Uк = k2 cos t — так называемая квадратурная помеха (сдвинута по фазе на  по отношению к полезному сигналу) (k2 = – Bm S).
по отношению к полезному сигналу) (k2 = – Bm S).
Коэффициенты k1 и k2 — определяются конструктивными параметрами ИП.
В электрической схеме лага квадратурная помеха устраняется, а из полезного сигнала извлекается информация о скорости судна V.
Следует отметить, что использовать в ИП постоянное магнитное поле нельзя, т.к. при этом возникает поляризация электродов. Поляризация электродов происходит за счет образования в прилегающих к ним тонких слоях воды электрических зарядов, обусловленных действием электростатических сил. ЭДС поляризации, возникающая в области между электродами, нарастает пропорционально количеству протекающего через электроды электричества и снижает до нуля измеряемое напряжение.
| <== предыдущая страница | | | следующая страница ==> |
| Корреляционные лаги | | | Основные погрешности индукционных лагов |
Дата добавления: 2014-08-04; просмотров: 796; Нарушение авторских прав

Мы поможем в написании ваших работ!