Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Индукционные магнитные компасы и особенности учета в них девиации
В качестве чувствительного элемента в индукционных магнитных компасах используется индукционный датчик (ИД). Так же как в электромеханической системе передачи информации ИД состоит из двух или трех феррозондов, каждый из которых определяет составляющую напряженности магнитного поля вдоль его собственной оси. Только в данном случае ИД реагирует не на поле картушки, а измеряет суммарное магнитное поле Земли и судна. Из сигналов этих зондов вырабатывается результирующий сигнал, который определяет направление вектора горизонтальной составляющей магнитного поля относительно диаметральной плоскости судна и следовательно курс судна.
К достоинствам индукционных магнитных компасов по сравнению со стрелочными относятся:
· отсутствие картушки, а следовательно и связанных с ней погрешностей;
· отсутствие нактоуза, благодаря чему компас можно размещать в наилучших в магнитном отношении местах судна;
· малые размеры индукционного датчика и девиационного устройства.
На смену стержневым в последнее время пришли кольцевые феррозонды (рис. 1.7).
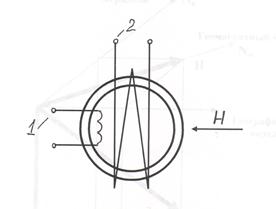
Рис. 1.7
В таком феррозонде 1 — одна обмотка возбуждения и 2 — одна или несколько сигнальных обмоток. В последнем случае сигнальные обмотки размещаются под разными углами к вектору измеряемого поля.
Феррозонды питаются током синусоидальной или прямоугольной формы. Во втором случае ИД работает более устойчиво при значительном усилении его выходных сигналов.
Выходные сигналы ИД — это напряжения постоянного тока, полученные путем синхронного детектирования гармоник выходных сигналов феррозондов, пропорциональных составляющим напряженностей измеряемых магнитных полей.
Через коммутатор эти сигналы поочередно поступают на вход аналого-цифрового преобразователя (АЦП), преобразуются в нем в цифровые коды и передаются в вычислитель. Вычислитель рассчитывает значение компасного курса (к’) и модуля вектора Н’ горизонтальной составляющей измеряемого магнитного поля. Значения модуля вектора Н’ используется для определения поправок компаса.
Эта задача решается при переключении прибора в режим “калибровка” и осуществлении соответствующих измерений при выполнении судном циркуляции.
На основе полученных значений Н’ микропроцессор вычисляет всю совокупность поправок к к’, запоминает их и учитывает для определения к (магнитного курса)судна. В этом особенность определения и учета полукруговой девиации индукционного компаса.
Мы рассмотрели лишь принцип, положенный в основу индукционного магнитного компаса. В конкретных модификациях индукционных магнитных компасах может быть немало конструктивных и схемных отличий.
Так, как уже отмечалось, ИД может иметь два или три феррозонда. Индукционный датчик может быть установлен в корпус прибора в кардановом подвесе (например, в отечественном компасе “Аврал”) или без карданового подвеса, при этом информация о пространственной ориентации ИД получается с помощью трех акселерометров (например, в отечественном компасе ДС-83 “Горизонт”). Индукционный компас может не иметь компенсатора девиации (ДС-83 “Горизонт”) или иметь. Так, в “Аврале” есть компенсатор электромагнитной девиации (ЭМД), состоящий из трех пар ортогональных квадратных катушек Гельмгольца и двух подвижных компенсаторов четвертной девиации, выполненных в виде прямоугольного и цилиндрического брусков из магнитомягких материалов.
На погрешность индукционного магнитного компаса оказывают влияние:
1 — наличие не скомпенсированного судового магнитного поля;
2 — качка судна (при качке на показания прибора оказывает влияние вертикальная составляющая судового магнитного поля. Для уменьшения этого влияния осредняют мгновенные значения курса судна);
3 — инструментальные ошибки и ошибки систем дистанционной передачи информации (пренебрежимо малы по сравнению с (1));
4 — неточная ориентация ИД относительно диаметральной плоскости судна (не более 0,2о).
| <== предыдущая страница | | | следующая страница ==> |
| Дистанционный магнитный компас с датчиком углового перемещения | | | Основные свойства и параметры звукового поля |
Дата добавления: 2014-08-04; просмотров: 1052; Нарушение авторских прав

Мы поможем в написании ваших работ!