Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Входные воздействия для идентификации динамических систем
Среди активных воздействий для идентификации динамических систем наибольшее распространение получили приведенные ниже сигналы, отклик на которые определяет модель объекта.
Гармонический сигнал имеет вид представленный на рис.1.4
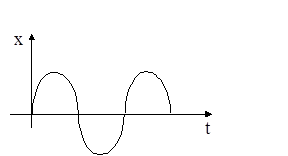
Рис.1.4. Гармонический сигнал
В аналитической форме этот сигнал может быть представлен в виде
A(t) = A0 sin(wt+y),
где t –текущее время,
Ψ – фаза сигнала,
w - круговая (угловая) частота, определяемая по формуле
w = 2pf,
где f – циклическая частота (колебания \ сек).
В результате воздействия гармонического сигнала на достаточно большом частотном диапазоне получают амплитудно-частотные характеристики, по которым можно определить спектральную характеристику исследуемого объекта или передаточную функцию.
Сигнал в виде импульсной функции имеет следующую форму (см.рис.1.5)
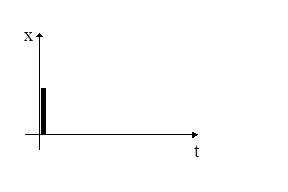
Рис.1.5. График импульсной функции
В аналитической форме график импульсной функции может быть представлен как
 ,
,
где t0 – временной момент импульса.
В результате воздействия импульсной функции получают весовую функцию объекта.
Белый шум. Гауссовский сигнал(рис.1.6)
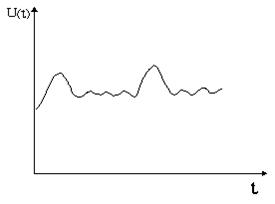
Рис.1.6. Белый шум
Ступенчатый сигнал имеет вид, представленный на рис.1.7.
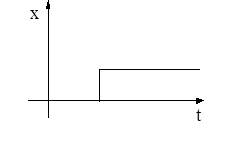
Рис.1.7. Сигнал ступенчатой формы
Аналитическое представление можно записать как
 ,
,
где t0 – временной момент нарастания ступеньки
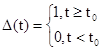
Прямоугольный импульсный сигнал (меандр) (рис.1.8)
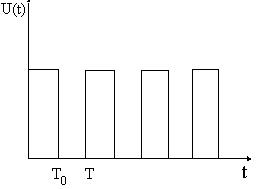
Рис.1.8. Меандр
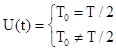 ,
,
где T0 / T – скважность сигнала
На выходе системы получаем переходную функцию. Приведенные входные функции характеризуют различные стороны динамического объекта, но между собой они связаны прямыми и обратными преобразованиями Фурье, Лапласа или интегралом свертки. Для исследования динамических систем могут использоваться самые различные простые и сложные сигналы. Например, белый шум ¾ то есть случайный стохастический сигнал, частотный спектр которого гипотетически изменяется от нуля до бесконечности (рис.1.6).
С помощью статистического анализа получают одну из перечисленных выше динамических характеристик объекта.
Следовательно, при воздействии импульсной функцией на выходе получаем отклик в виде весовой функции, при воздействии ступенчатого сигнала получаем переходимую функцию, при воздействии гармонического сигнала, белого шума и меандры получаем частотные (спектральные) характеристики. Для исследования динамических систем также используется теория планирования эксперимента, где вместо статистических значений используются входные динамические зависимости сигнала от времени.
Если объект исследования не позволяет проводить активные воздействия, то его подвергают пассивным методам наблюдения-сбор информации с объекта в режиме его нормальной эксплуатации.
Для пассивных данных используют приемы фильтрации, методы корреляционного или регрессионного анализа.
Наблюдаемые сигналы, как входные, так и выходные, могут быть двух типов:
- дискретные,
- непрерывные.
Для цифровой обработки непрерывные сигналы преобразуются аналого-цифровой аппаратурой на основе математических методов дискретизации в дискретную форму для представления в ЦВМ.
1.5 Вопросы для самоконтроля
1.Дайте определение объекта моделирования.
2.Что представляет собой математическая модель объекта?
3.Перечислите методы построения моделей.
4.Чем отличаются активные и пассивные методы идентификации?
5.Перечислите входные воздействия для идентификации динамических систем.
6.Какие характеристики получаются в результате воздействия гармоническим, импульсным и ступенчатым сигналом?
| <== предыдущая страница | | | следующая страница ==> |
| Свойства оценок параметров модели | | | ИНТЕРПОЛЯЦИЯ |
Дата добавления: 2014-08-04; просмотров: 466; Нарушение авторских прав

Мы поможем в написании ваших работ!