Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Расчет текущих параметров движения судна по спутниковым обсервациям»
В практике известно 3 способа определения маневренных качеств:
- Визуальный
- С помощью РЛС
- На радионавигационном полигоне
Все способы требуют определенных ориентиров, дальности видимости, погодных условий, состояния моря и даже привлечения береговых служб. Кроме того необходима подготовка и слаженность действий штурманского состава и вывод судна из эксплуатации.
Проблема решается расчетом практически всех элементов движения судна по траекторным измерениям с помощью спутниковых ПИ, причем задача решается во время плановых маневров без вывода судна из эксплуатации, а так же во время учебных тревог.
Расчеты могут выполняться по выборкам координат судна после выполнения маневров. При сопряжении ПИ с компьютером все расчеты выполняются в реальном масштабе времени. Это позволяет контролировать исполнение плановых маневров, а так же корректировать их с учетом влияния погодных условий, течения, ветра и т.п. Метод исключает субъективность принятия судоводителем решения по управлению судном.
Сущность метода заключается в следующем:
По φi , λi строится таблица
| ti | φi | λi | ΔXi | ΔYi | Xi | Yi |
Δt = ti+1- ti = 0,5 – 1 мин.
 Интервал измерения: ΔXi = φi – φi+1
Интервал измерения: ΔXi = φi – φi+1
ΔYi =(λi – λi+1) Cos φi
 Xi =
Xi =  ΔXi (5.1)
ΔXi (5.1)
Yi = ΔYi
По табличным значениям (5.1) на компьютере строятся аналитические функции.
 X(t) = f1 (t) (5.2)
X(t) = f1 (t) (5.2)
Y(t) = f2 (t)
В качестве функции (5.2) наиболее просты в использовании степенные функции.
В зависимости от вида маневра рекомендуется два вида функций:
 - Для сложных маневров (циркуляция, ряд последовательных поворотов) рекомендуются функции вида:
- Для сложных маневров (циркуляция, ряд последовательных поворотов) рекомендуются функции вида: 
 (5.3)
(5.3)
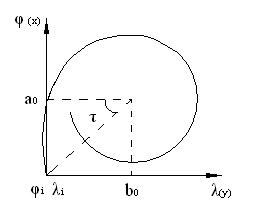
Выражения (5.3) построены на основе представления окружности в параметрической форме с разложением функции Sin  t и Cos t в степенные ряды по нечетным и четным степеням.
t и Cos t в степенные ряды по нечетным и четным степеням.
Коэффициенты a0, b0 смещают начало системы координат относительно точки начала маневра, а коэффициенты a1 a3 a5 и b2 b4 b6 деформируют окружность так, чтобы она совпадала с траекторией судна. Смысл τ ясен из рисунка.
Аппроксимация (5.3) воспроизводит кривую циркуляции с точностью порядка 10 метров.
 - Для более простых маневров (разгон, торможение, малые повороты) рекомендуются функции вида:
- Для более простых маневров (разгон, торможение, малые повороты) рекомендуются функции вида: 

 (5.4)
(5.4)
При известных (построенных компьютером) номиналах вычисляются:
- Радиус циркуляции: 
- Линейная скорость: 

- Угловая скорость: 
-Путевой угол: 
- Угол дрейфа: 
| <== предыдущая страница | | | следующая страница ==> |
| Общая характеристика функций и состав информации АИС | | |
Дата добавления: 2014-08-09; просмотров: 285; Нарушение авторских прав

Мы поможем в написании ваших работ!