Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Состав и общая характеристика системы управления двигателем
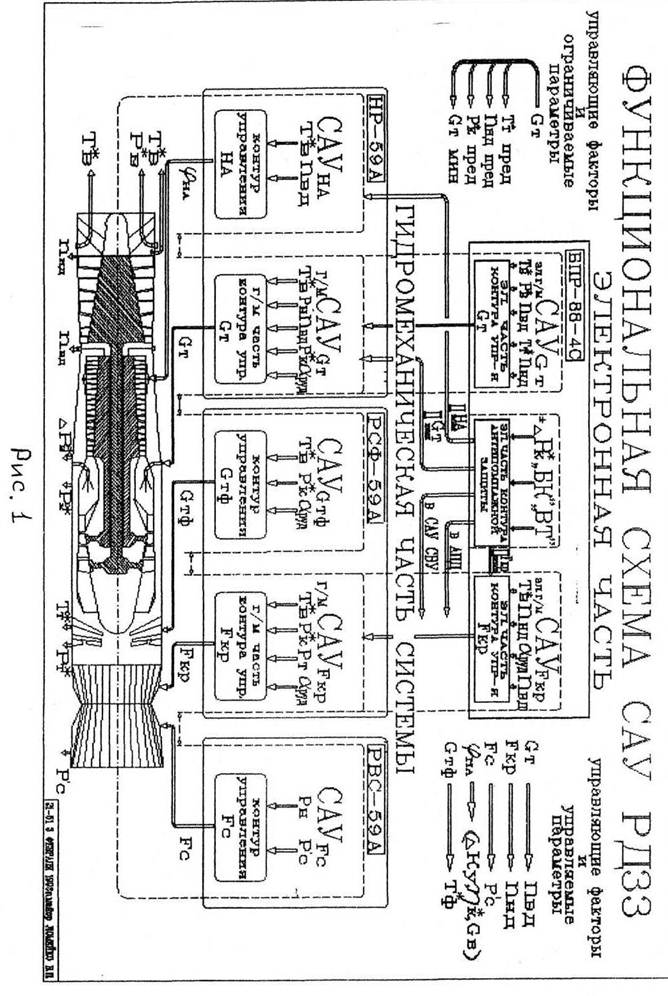
На рис. 1 представлена обобщённая функциональная схема систем управления двигателем. Автоматические устройства системы выполнены на электронно-гидромеханической основе. В её состав входят контуры управления: направляющими аппаратами КВД, расходом топлива в основной камере сгорания, расходом топлива в форсажной камере сгорания, площадью критического сечения сопла, площадью выходного сечения сопла. Контуры управления связаны между собой через объект управления - двигатель.
– САУна квд - ГМ основа;
– САУGT-Э ГМ основа;
– САУGTФ - ГМ основа;
– САУFKP - ЭГМ основа;
– САУFС - ГМ основа;
Отдельный контур управления совместно с двигателем образует систему управления каким-либо фактором (или параметром).
Как видно из рис. 1, устройства управления направляющими аппаратами КВД (САУ НА), расходом топлива в форсажной камере (САУ GTФ), площадью выходного сечения сопла (САУ FС) выполнены на гидромеханической основе.
Устройства же управления расходом топлива в основной камере сгорания (САУ GT) и площадью критического сечения сопла (САУ FKP) выполнены на электронно-гидромеханической основе и входят в состав как электронной (БПР), так и гидромеханической частей системы управления.
САУ GT включает:
– Систему топливоподачи;
– Гидромеханическую часть;
– Электронную часть.
В состав системы топливоподачи входят:
– Плунжерный топливный насос переменной производительности (ПТН);
– Дозирующее устройство (ДУ);
– Регулятор постоянного перепада давлений на ДУ (peг. Рду).
В состав гидромеханической части входят:
• Устройства системы управления частотой вращения РВД (peг. nВД);
• Автомат управления расходом топлива при приемистости (автомат приемистости - АП);
• Автомат управления расходом топлива при запуске (пневматический топливный автомат запуска (ТАЗ) с высотным корректором);
• Ограничители предельного значения давления воздуха за компрессором и минимального расхода топлива в основной камере сгорания (Р*к пред и GT мин).
Системы управления частотой вращения РВД, ограничения давления воздуха за компрессором являются замкнутыми (т.е. выполненными на принципе по отклонению управляемых параметров от заданных значений) благодаря наличию главной обратной связи по управляемому (nВД) или ограничиваемому (Р*к) параметрам, что обуславливает высокую точность работы указанных систем. Остальные системы управления выполнены незамкнутыми, с программным управлением регулирующими факторами.
Регулятор nВД обеспечивает поддержание заданного РУД значения nВД и коррекцию его по температуре воздуха Т*в.
Автомат приемистости дозирует расход топлива при приемистости, воздействуя на исполнительное устройство регулятора (рис. 2, сигнал уАП). Программа дозирования GT автоматом приемистости формируется в зависимости от частоты вращения пВд, давления воздуха за компрессором Р*К и температуры воздуха на входе в двигатель Т*в.
Топливный автомат запуска с высотным корректором регламентирует количество сливаемого за дозирующим краном топлива так, что программа дозирования топлива при запуске формируется в зависимости от давлений Р*К и Рн. На высотах Н>6км программа автомата запуска дополнительно корректируется по электрическому сигналу от панели запуска (рис. 2, сигнал от АПД).
Ограничитель предельного давления воздуха за компрессором обеспечивает снижение GT, а следовательно, снижение частоты вращения nВД, воздействуя на исполнительное устройство регулятора. Для исключения чрезмерного падения nВД в процессе работы ограничителя на частотах nВД< 79±2% его действие блокируется (рис. 2).
В состав электронной части САУ GT входят устройства, выполняющие функции настройки регулятора nВД и ограничителей Т*т пред, nНДпред, а также передачи первичных сигналов в гидромеханическую часть контура управления nВД.
Формирование первичного сигнала, в соответствии с принципом управления и ограничения указанных выше параметров, обеспечивается путём сравнения в электронных устройствах заданных и действительных значений nВД, nНД, Т*т.
Электронная часть взаимодействует с гидромеханической частью САУ GT по проводной связи через электро-гидромеханический преобразователь - усилитель (ЭГУ, рис. 2). При этом САУ nВД, ограничители nНД, и Т*т включают как электронные, так и гидромеханические устройства. При отказе электронных устройств (они отключаются специальным селектором (рис. 2)) их функции в контуре управления nВД выполняют, дополнительно предусмотренные гидромеханические устройства. Функционирование же ограничителей Т*т ПРЕД И nНДпред исключается.
Электронно-гидромеханические системы управления nВДмакс и Т*т пред соответственно обеспечивают заданные программы с коррекцией по температуре и давлению воздуха на входе в двигатель (Т*в, Р*в). Для исключения зоны совместной работы электронно-гидромеханической и гидромеханической систем регулирования nВД на максимальном и форсированных режимах настройка гидромеханического регулятора выше настройки электронно-гидромеханического на 2,5-3,5%.
Система ограничения nНДпред обеспечивает заданную программу ограничения с коррекцией по температуре воздуха на входе в двигатель (Т*в).
В случае отказа электронной части САУ GT (на максимальном или форсажных режимах), сопровождающегося уменьшением расхода топлива, предусмотрена блокировка её действия на частотах nВД<79±2% (см. рис. 2).
Если отказ сопровождается увеличением nВД выше допустимого значения осуществляется переход на гидромеханический регулятор nВД. В последнем случае выдаётся электрический сигнал на уменьшение настройки гидромеханического регулятора, т.к. она на максимальном и форсированных режимах выше настройки электронно-механической системы управления nВД макс (рис. 2, сигнал «отказ БПР»).
САУ FKР включает:
• Электронную часть.
• Гидромеханическую часть.
В состав гидромеханической части САУ FKР входят:
• Система программного управления минимально допустимой величиной площади критического сечения сопла по положению РУД (αРУД) и температуре наружного воздуха Т*в.
• Замкнутая система управления степенью понижения давления газа в турбине (САУ π*τ ) с коррекцией настройки от электронной части САУ FKP.
В состав электронной части САУ FKP входят устройства, выполняющие функции настройки регулятора nНД и выдачи командного сигнала коррекции настройки гидромеханического регулятора π*τ. Формирование командного сигнала обеспечивается за счёт сравнения заданного и действительного значений nНД, в соответствии с величиной отклонения ΔnНД=nНД З - nНД
Фактически, электронная часть САУ FKP. и замкнутая гидромеханическая система управления π*τ. (САУ π*τ) образуют замкнутую комбинированную САУ nНД с воздействием на FKР. При этом электронная часть системы выполняет функции «надсмотрщика» (супервизора) над САУ π*τ. При этом настройка регулятора π*τ, а значит и поддержание заданного значения π*ТЗ, обеспечиваются из условий стабилизации заданного значения nНДЗ. Значение nНД З формируется в электронных устройствах в зависимости от температуры воздуха на входе в двигатель Т*в, частоты вращения РВД, а также разовых командных сигналов, предусмотренных общей программой управления двигателя.
С учётом выполнения указанных выше функций электронной и гидромеханической частями САУ FKР, структура комбинированной САУ FKР
на основе замкнутой гидромеханической САУ π*τ, в технической литературе названа супервизорной.
Электронная часть САУ FKP, связана с гидромеханическими устройствами по проводной связи посредством электро-гидромеханического преобразователя-корректора (ЭГУ, рис. 2). При отказе электронной части, управление nНД исключается, а гидромеханическая САУ π*τ. обеспечивает поддержание постоянного значения степени давления газа в турбине.
Управление nНД с высокой точностью (замкнутая САУ nНД) в зависимости от nНД позволяет сохранять необходимые запасы устойчивой работы компрессора в соответствии с поддержанием заданной величины скольжения обоих роторов.
Наличие в САУ FKP, системы программного управления по положению РУД (αРУД) и Т*в исключает опасность недопустимого прикрытия створок сопла при работе регулятора nНД (π*τ.).
САУ на КВД
 Выполнена на гидромеханической основе, является незамкнутой системой программного управления направляющими аппаратами в зависимости от приведённой частоты вращения ротора высокого давления: φНАЗ= φНА( nВД пр).
Выполнена на гидромеханической основе, является незамкнутой системой программного управления направляющими аппаратами в зависимости от приведённой частоты вращения ротора высокого давления: φНАЗ= φНА( nВД пр).
Поворот направляющих аппаратов осуществляется по линейному закону в пределах от -30° до 0...20 при изменении nВД пр в диапазоне 75...83%.
САУ Gтф
Выполнена на гидромеханической основе, является незамкнутой системой программного управления расходом топлива в форсажной камере в зависимости от давления воздуха за компрессором Р*к, температуры воздуха на входе в двигатель Т*в, положения РУД. При αРУДi, = сonst программное изменение расхода топлива в форсажной камере в зависимости от величины Р*к с коррекцией по Т*в обеспечивает в условиях полёта сохранение примерно постоянной величины температуры газа в форсажной камере Τ*Φi= сonst.
В системе управления расходом топлива в форсажной камере сгорания целесообразно выделить систему топливоподачи, а также автоматическое управляющее устройство расходом топлива.
В состав системы топливоподачи входят:
• Центробежный форсажный насос (ФН).
• Два дозирующих устройства (одно осуществляет дозирование топлива в 1й коллектор в зависимости от давления Р*к и температуры Т*в, другое - во 2й и 3-ий коллекторы в зависимости от αРУД, Р*к и Т*в).
• Два регулятора постоянного перепада давлений на дозирующих устройствах (peг. ΡДУФ).
В состав автоматического управляющего устройства входят: регуляторы, осуществляющие поворот одного из дозирующих устройств в
– функции αРУД (регулятор jДУФ) и перемещении обоих дозирующих устройств в функции Р*К и Т*в, (регулятор mДУФ).
 CAУ Fc Обеспечивает поддержание площади выходного сечения сопла Fc, соответствующей полному расширению газа после критического сечения.
CAУ Fc Обеспечивает поддержание площади выходного сечения сопла Fc, соответствующей полному расширению газа после критического сечения.
Система управления выполнена на гидромеханической основе, является замкнутой с обратной связью по параметру Рс - давлению газа на срезе сопла. Заданное значение давления газа РСЗ формируется в программном задающем устройстве (ПЗУ) в зависимости от величины атмосферного давления Рн.
Система предупреждения и ликвидации помпажапредназначена для вывода двигателя из помпажа при его возникновении (от сигнализатора помпажа СТП, сигнал ±Δ Р*к) и обеспечение кратковременного увеличения запасов газодинамической устойчивости (ГДУ) компрессора при пусках ракет (от боевой кнопки «БК»).
Система выполнена на электронно-гидромеханической основе.
Электронная часть системы включает канал антипомпажной защиты электронного блока БПР (рис. 2), формирующий командные электрические сигналы в системы:
• Управление площадью критического сечения сопла, сигнал САУ FKР (через каналы регулирования nНД макс или nНД КР электронного блока БПР)
• Управления расходом топлива в основной камере сгорания, сигнал САУ GT.
• Управление воздухозаборником, сигнал САУ СВУ.
• Запуска двигателя в воздухе, сигнал АПД.
• Управления направляющими аппаратами КВД, сигнал САУ НА.
Гидромеханическая часть системы включает исполнительные устройства (а также электрогидравлические преобразователи), входящие в состав названных выше систем управления и обеспечивающие:
поворот направляющих аппаратов КВД;
увеличение площади критического сечения сопла;
резкое уменьшение расхода топлива в ОКС;
перемещение панелей клина воздухозаборника (на рис. 2).
Электрические сигналы, поступающие от электронной части системы на соответствующие гидромеханические системы обозначены: «помпаж» от БПР).
 |

| <== предыдущая страница | | | следующая страница ==> |
| Задачи решаемые системой управления двигателем | | | ТЕМА № 13. «СИСТЕМЫ УПРАВЛЕНИЯ ГТД». ЗАНЯТИЕ №2. «Задание режима работы двигателю |
Дата добавления: 2014-08-09; просмотров: 431; Нарушение авторских прав

Мы поможем в написании ваших работ!