Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ТЕМА № 13. «СИСТЕМЫ УПРАВЛЕНИЯ ГТД». ЗАНЯТИЕ №4. «Специальные автоматические устройства гидромеханической системы управления расходом топлива в основной камере сгорания»
ЗАНЯТИЕ №4. «Специальные автоматические устройства гидромеханической системы управления расходом топлива в основной камере сгорания».
Время: 2 часа (групповое занятие)
Цель занятия: Изучить автомат приемистости и сброса газа, топливный автомат запуска, ограничители Рк* и Gт min.
Изучаемые вопросы:
1.Автомат приемистости и сброса газа.
2.Топливный автомат запуска.
3.Ограничитель давления воздуха за компрессором (Рк*).
4.Ограничитель минимального расхода топлива (Gт min).
1.Автомат приемистости и сброса газа.
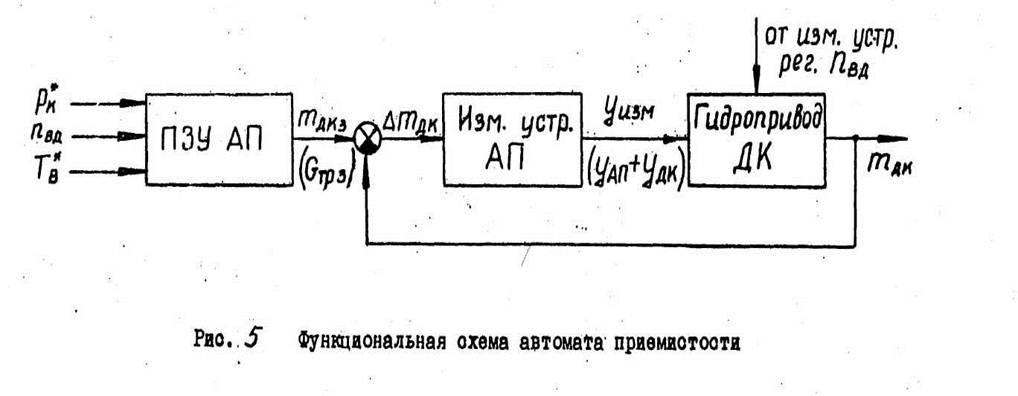
Автомат приемистости (АП) предназначен для ограничения расхода топлива в основную камеру сгорания в процессе приемистости. Реализуемая АП программа учитывает изменение трех параметров:
■ давления воздуха за компрессором р*к
■ частоты вращения ротора высокого давления nВД
■ температуры воздуха на входе в двигатель Т*В G т разг=Кр*кf(nвд,Т*в).
На рис. 5представлена функциональная схема такого АП.
При быстром перемещении РУД в процессе приемистости к гидроприводу дозирующего крана поступает сигнал от измерительного устройства гидромеханического регулятора nВД. Это обусловливает быстрый поворот дозирующего крана на увеличение расхода топлива, обеспечивая первоначальный скачок по расходу топлива до величины, на которую в данный момент настроен АП в соответствии с текущими значениями р*К, nВД, Т*В. Координата mДК, характеризующая положение дозирующего крана, используется в качестве сигнала, определяющего расход топлива, поскольку на дозирующем кране поддерживается постоянный перепад давления.
Заданное значение расхода топлива в процессе приемистости Gт разг з формируется в программном задающем устройстве (ПЗУ) в зависимости от значений р*К, nВД, Т*В. В процессе приемистости обеспечивается равенство mДК=mДК З.
Если mДК > mДК З, то в измерительном устройстве АП вырабатывается сигнал уизм, который, воздействуя на гидропривод дозирующего крана, обеспечивает устранение ошибки ΔmДК = mДК З - mДК.
При экспоненциальной зависимости площади проходного сечения ДК FДК=bemДКи постоянном перепаде давления на нем расход через ДК равен:
|

При равенстве GТР=GTР З в процессе приемистости:

Если взять натуральные логарифмы от обеих частей равенства, то получим: mДК =ln р*к + ln f(nВД, Т*В) + ln k - In A
Правая часть полученного выражения соответствует заданному положению ДК и по сигналам от датчиков р*к, nВД, Т*В в программном задающем устройстве с помощью программных логарифмических кулачков преобразуется в перемещение измерительного устройства АП.
Левая часть этого выражения соответствует фактическому положению ДК и через элементы обратной связи также преобразуется в перемещение измерительного устройства АП.
Принципиальная схема АП представлена на рис. 16* .
ПЗУ автомата приемистости включает:
■ датчики р*к, nВД, Т*В с гидромеханическими усилителями;
■ пространственный кулачок 47, в котором заложена функция f(nВД, Т*В);
■ плоский кулачек 29, в котором заложена функция ln р*к;
■ суммирующее устройство рычажного типа (рычаги 28, 24, 25), обеспечивающие суммирование функций, заложенных в кулачках 47 и 29;
■ золотниковый усилитель 26.
Датчик давления р*к состоит из сильфона 32 с жиклерами подвода и стравливания воздуха. В процессе приемистости перепады давления на жиклерах сверхкритичёские, поэтому давления внутри сильфона p'K=k1 p*K. Введение вакуумированного сильфона 35 позволяет обеспечить замер абсолютного давления р'К. Следящая система, состоящая из рычага 33 с заслонкой, исполнительного гидроцилиндра 23 с рейкой и шестерней 30, пружины жесткой обратной связи 31а и пружины 36, преобразует давление р*к в поворот шестерни 30 так, что угол φ поворота шестерни пропорционален р*к, т. е. φ(р*к)=к2 р*к.
В полость А рабочая жидкость поступает от регулятора постоянного давления 3.
В полость В рабочая жидкость поступает от регулятора постоянного давления 2 через жиклер 22 и сливается через жиклер 31, перекрываемый заслонкой рычага 33.
При изменении величины давления р*к рычаг 33 поворачивается относительно своей оси, изменяя эффективную площадь слива рабочей жидкости через жиклер 31. Вследствие этого меняется давление в полости В гидроцилиндра, поршень которого, перемещаясь, поворачивает через рейку и шестерню 30 кулачек 29. Одновременно изменяется затяжка пружины 31а обратной связи, что, в свою очередь оказывает такое воздействие на давление в полости В, в результате которого поршень останавливается в новом равновесном положении.
Таким образом осуществляется преобразование давления р*к в поворот шестерни с кулачком 2, в котором заложена функция In р*к.
Частота вращения ротора высокого давления воспринимается центробежным механическим датчиком и преобразуется с помощью гидромеханического усилителя в продольное перемещение валика 73 с пространственным кулачком 47.
Полости С и Д гидроцилиндра 77 проточные. Рабочая жидкость от регулятора постоянного давления 2 поступает в них через жиклеры постоянного сечения 70 и 71, а сливается через жиклеры 69, частично перекрываемые на определенную величину заслонкой 68.
На установившихся режимах усилия от центробежных сил грузиков и пружин взаимно уравновешены, заслонка 68 занимает равновесное положение, при котором поршень гидроцилиндра неподвижен.
При изменении nВД заслонка 68 поворачивается, вследствие чего изменяются в полостях С и Д.
Поршень 77 со штоком гидроцилиндра начинает перемещаться и через рычаг перемещает валик 73 с кулачком 47. Одновременно поворачивается кулачок 74 жесткой обратной связи и через рычаги обратной связи 75 и 76 изменяет затяжку пружины 63а, которая также выполняет функцию жесткой обратной связи. Это, в свою очередь, приводит к повороту заслонки и изменению давлений в полостях С и Д до тех пор, пока движение поршня гидроцилиндра не прекратится. Усилие пружины обратной связи уравновесит усилие от грузиков и заслонка займет равновесное положение.
Таким образом положение поршня со штоком, а, следовательно, и валика 73 с пространственным программным кулачком 47, однозначно определяется величиной частоты вращения ротора высокого давления. Характеристика зависимости перемещения поршня гидроцилиндра от частоты вращения линейная, что достигается соответствующей профилировкой кулачка 74.
Датчик температуры воздуха на входе в двигатель Т*В с гидромеханическим усилителем обеспечивает поворот валика 73 с пространственным программным кулачком, пропорциональный величине Т*В. Работа датчика Т*В с гидромеханическим усилителем описана ранее.
На установившихся режимах автомат приемистости настроен на максимально допустимый расход топлива в соответствии с конкретными значениями р*к, nВД, Т*В, который больше расхода топлива, обеспечиваемого регулятором частоты вращения ротора высокого давления.
При постоянном перепаде давления на дозирующем кране расход топлива, как известно, однозначно определяется положением заслонки дозирующего крана - mДК.
Следовательно, на установившихся режимах mДК АП > mДК, где mДК АП -положение ДК, определяемое автоматом приемистости, т. е. mДК АП = mДК З
При этом программными кулачками 47 и 29 через суммирующий рычаг 28, шток 27, рычаг обратной связи 25 и рычаг 24 золотниковому усилителю 26 передается перемещение уАП, характеризующее mДК З.
От дозирующего крана через кулачок обратной связи оси рычага передается перемещение, которое также сообщает золотнику перемещение удк, определяемое истинным положением ДК - mДК .
На установившихся режимах суммарное перемещение золотника 26 такое, что слив рабочей жидкости через него из полости гидроцилиндра управления дозирующим краном закрыт (уАП > уДК).
Давление в управляющей полости определяется работой усилительного устройства регулятора частоты вращения.
При быстром перемещении РУД в процессе приемистости к гидроприводу дозирующего крана поступает сигнал, что обусловливает быстрый поворот ДК на увеличение расхода топлива. Тем самым обеспечивается первоначальный скачок по расходу топлива. При этом кулачок обратной связи через рычаги вызывает перемещение золотника 26, который сообщает управляющую полость со сливом.
Величина открытия слива с этого момента зависит от соотношения mДК 3, определяемого значениями р*к, nВД, Т*В и mДК, определяемого действительным положением заслонки дозирующего крана. Если mДК > mДК З, то через золотник обеспечивается слив рабочей жидкости из полости Е гидроцилиндра управления ДК до устранения ошибки регулирования:
ΔmДК = mДК З - mДК = 0
В процессе приемистости изменяются величины р*к и nВД, вследствие чего увеличивается и значение mДК, что обусловливается перемещением заслонки дозирующего крана на увеличение расхода топлива.
В конце приемистости регулятор nВД, настроенный на меньший расход топлива, вступает в работу, обеспечивая на установившемся режиме работы расход топлива в соответствии с заданным РУД значением nВД.
Специальных устройств, регламентирующих сброс режима, в системе автоматического управления не предусмотрено. При резком перемещении РУД на уменьшение режима темп перемещения дозирующего крана определяется дроссельным пакетом 17 корректирующего устройства регулятора nВД.
2. Топливный автомат запуска.
В системе запуска применяется пневматический топливный автомат запуска (ТАЗ) (рис. 16*.), ограничивающий в процессе запуска давление топлива перед форсунками в зависимости от величины р*к с коррекцией по Рн.
Ограничение давления топлива перед форсунками, а, следовательно, и расход топлива в процессе запуска осуществляется за счет слива части топлива после дозирующего крана через золотник 20 ТАЗ.
В начальной стадии запуска (р*к мало) количество поступающего в камеру сгорания топлива определяется затяжкой пружины 17.
По мере увеличения nВД и соответствующего увеличения р*к золотник перемещается таким образом, что уменьшает слив топлива за дозирующим краном.
При выходе двигателя на режим nВД =35% достигает величины, при которой золотник 20 полностью перекрывает слив топлива.
Расход топлива в камеру сгорания при запуске на высотах до 6 км корректируется высотным корректором. С увеличением высоты анероиды 16 расширяются и через рычаг растягивают пружину 18, тем самым уменьшая усилие на мембрану 19. Таким образом осуществляется коррекция расхода топлива в камеру сгорания за счет увеличения количества сливаемого топлива.
При запуске на высотах Н>6 км работа ТАЗ корректируется узлом
перенастройки.
В этом случае на электромагнитный клапан 9 поступает электрический сигнал. Клапан закрывается и прекращает слив из полости сильфона 10. Давление топлива в полости сильфона увеличивается до значения за регулятором постоянного давления 3, сильфон перемещает вверх шток клапана 11, который открывает канал для дополнительного стравливания воздуха за компрессором через жиклер 13.
Уменьшение давления воздуха в полости вызывает перенастройку характеристики ТАЗ на уменьшение расхода топлива в камеру сгорания.
На заключительном этапе запуска, в зависимости от конкретных внешних условий, может оказаться, что автомат приемистости настроен на меньший расход топлива (золотник ТАЗ полностью перекрывает слив из управляющей полости гидроцилиндра управления ДК).
В этом случае заключительный этап запуска обеспечивается автоматом приемистости.
3. Ограничитель давления воздуха за компрессором (огр. р*к)
Предназначен для ограничения предельного давления воздуха за компрессором путем уменьшения расхода топлива.
Функционально ограничитель (рис. 16*) состоит из датчика давления и усилителя золотникового типа, воздействующего на управляющую полость гидроцилиндра управления ДК.
Датчик давления преобразует давление р*к в поворот шестерни 30, а через нее и шестерни 37, в перемещение втулки 38.
До достижения режима ограничения р*к боковое отверстие в штоке-золотнике 39 закрыто втулкой 38, уР*к < уР*к огр, где уР*к - координата положения втулки, пропорциональная величине р*к, уР*к огр - координата положения бокового отверстия в золотнике, характеризующая величину р*К. ОГР .
По мере увеличения р*к втулка перемещается по золотнику, разность уР*к - уР*к огр уменьшается.
При достижении р*к ОГР втулка приоткрывает боковое отверстие уР*к = уР*к огр и соединяет управляющую полость Е со сливом. Поршень 4 гидроцилиндра перемещает дозирующий кран 1 на уменьшение расхода топлива. При этом уменьшается частота вращения ротора высокого давления, величина р*к. Датчик давления р*к перемещает втулку на прикрытие бокового отверстия в золотнике, движение дозирующего крана и изменение расхода топлива прекращается.
Для исключения чрезмерного падения nВД в случае возникновения неисправности ограничителя его действие ограничивается диапазоном частот вращения от nВД МАКС до nВД =79±2%.
Это достигается за счет перекрытия штоком поршня 71 датчика nВД магистрали от управляющей полости Е до золотника 39 в диапазоне nВД = 79±2% и менее.
Регулировка величины ограничения р*К.ОГР производится перемещением золотника винтом 40.
Дата добавления: 2014-08-09; просмотров: 477; Нарушение авторских прав

Мы поможем в написании ваших работ!