Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ЭЛЕМЕНТЫ СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТОМ
|
 |
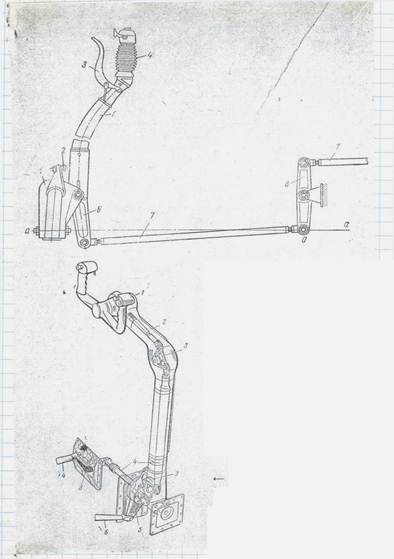
Рулем высоты и элеронами управляют при помощи ручки управления или штурвальной колонки. Ручка (рис. 10.1) представляет собой вертикальный неравноплечий рычаг с двумя степенями свободы, т. е. поворачивающийся вокруг двух взаимно перпендикулярных осей. При движении ручки вперед и назад отклоняется руль высоты, при перемещении ручки влево и вправо (поворот вокруг оси а — а) отклоняются элероны. Независимость действия руля высоты и элеронов достигается размещением шарнира О на оси а — а.
На тяжелых самолетах вследствие большой площади рулей высоты и элеронов увеличиваются нагрузки, потребные для отклонения рулей. В этом случае самолетом удобнее управлять с помощью штурвальной колонки (рис. 10.2). Подобных колонок на самолете две: одной управляет командир корабля, другой — второй пилот. Каждая колонка состоит из дюралюминиевой трубы, головки штурвала и нижнего узла — опоры штурвальной колонки, в торцах которого заделаны шарикоподшипники.
В нижней части колонки имеется рычаг, к которому присоединены тяги управления рулем высоты. Тяги управления элеронами соединены с качалками, установленными на кронштейнах. На каждом штурвале установлены кнопки управления связной радиостанцией, включения и отключения автопилота, самолетного переговорного устройства и нажимной переключатель управления триммером руля высоты.
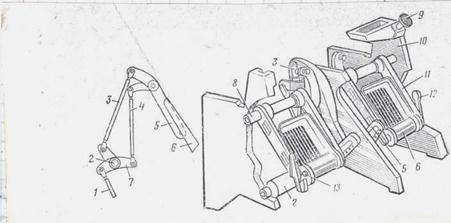
Рис. 12.3. Пульт ножного управления
Для управления рулем направления предназначены педали двух типов: перемещающиеся в горизонтальной плоскости и перемещающиеся в вертикальной плоскости. Педали в горизонтальной плоскости перемещаются по прямолинейным направляющим или на шарнирном параллелограмме, собранном из стальных тонкостенных труб. Параллелограмм обеспечивает прямолинейное перемещание педалей без их поворота, что необходимо для удобного и неутомительного положения ступни ноги пилота. Педали, перемещающиеся в вертикальной плоскости, имеют верхнюю или нижнюю подвеску. Положение педалей можно регулировать, подгоняя под рост пилота.
Пульт ножного управления (рис. 10.3) состоит из трех щек Щ между которыми на штангах 11, соединенных с трубой 8, подвешены педали 6. Каждая педаль пальцем 13, проходящим внутри оси педали, связана с секторной качалкой 5. Верхняя часть секторных качалок тягами 4 и 3 соединена с рычагами горизонтальной трубы 2. На трубе 2 закреплен рычаг 7, к которому присоединена тяга 1, идущая к рулю поворота. При нажатии, например, на левую педаль (от пилота), повернется секторная качалка 5, которая через тягу 3 вызовет поворот трубы 2 против часовой стрелки. Это движение в свою очередь через тягу 4 вызовет поворот секторной качалки правой педали в противоположную сторону. Пальцы служат для регулировки педалей по росту пилота. Регулирование выполняют следующим образом: пилот отжимает вбок рычаг защелки 12 и тем самым выводит палец 13 из зацепления с сектором 5. Пружина (на рисунке не показана) поворачивает педаль в сторону пилота.
Проводка управления (рис. 9.4) может быть гибкой, жесткой либо смешанной.
Гибкая проводка управления выполняется из тонких стальных тросов, диаметр которых выбирается в зависимости от действующей нагрузки и не превышает 8 мм. Так как тросы могут работать только на растяжение, то управление рулями в таком случае выполняется по двухпроводной схеме. Отдельные участки тросов соединяются тандерами. Трос к тандерам и секторам крепится коушами (рис. 9.5). Для уменьшения провисания тросов на прямолинейных участках используют текстолитовые направляющие, в местах перегиба троса устанавливают ролики с шариковыми подшипниками.

Жесткая проводка представляет собой систему жестких тяг и качалок. Качалки служат промежуточными опорами, которые необходимы для деления тяг на сравнительно короткие участки. Чем короче тяга, тем меньше вероятность вибраций. Но чем больше разъемов у тяг, тем больше масса проводки.
Рис. 9.4. Схема тросовой (а) и жесткой (б) проводок управления
1— педаль; 2 — ролик; 3 — трос; 4 — руль поворота; 5 — руль высоты; 6 — качалка; 7-элерон; 8 — тяги; 9 — штурвал
Для повышения надёжности управления каждая из тяг выполняется из двух труб и вставленных одна в другую. Основная труба — наружная, внутренняя дублер основной. Каждая труба в отдельности может полностью воспринять расчетную нагрузку, приходящуюся на эту тягу. Достоинства жесткой проводки следующие: отсутствие вытяжки проводки при эксплуатации, что исключает возможность образования люфтов; малые силы трения; высокая живучесть. Недостатки жесткой проводки по сравнению с гибкой - большая масса и потребность в значительных объемах для ее размещения. Гибкую проводку не следует применять при передаче больших усилий, а также в тех случаях, когда от управления требуется большая точность исполнения
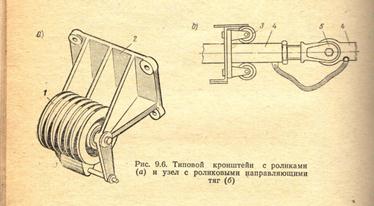
Для поддержания тросов управления и изменения их направления применяют ролики 1, которые прессуют из текстолита-крошки и для уменьшения трения
монтируют на шарикоподшипниках.
Кронштейны 2крепления роликов обычно литые и изготавливаются из
магниевых сплавов.
|
|
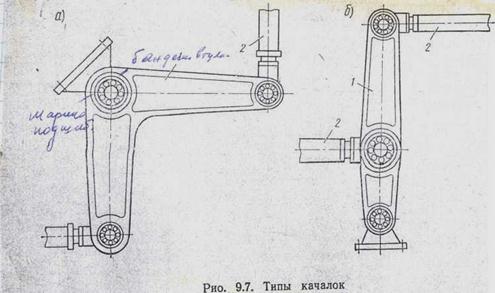
Тяги жесткой проводки 2 монтируют на качалках 1и роликовых направляющих 3.
Качалки служат для изменения направления движения рис. 9.7 (а),а также изменения
усилия в тягах рис. 9.7 (б). Все качалки имеют шарикоподшипники, обычно допускающие незначительный перекос колец. Подобные подшипники исключают
возможность заеданий от перекосов при неточностях монтажа или при деформациях
( повреждениях ) самолёта.
На участках, где тяги совершают прямолинейное движение, устанавливают роликовые направляющие. Больше двух роликовых направляющих на одной тяге ставить нельзя, так как при деформациях самолета это приводит к заеданию проводки. Направляющие имеют фланцы-крепления к фюзеляжу. В ушки направляющих, расположенных под углом 120° друг относительно друга, вмонтированы три шарикоподшипника, на наружные кольца которых напрессованы бандажные втулки. Между этими подшипниками и перемещается тяга. Управление механизацией крыла осуществляется или приводом с механической трансмиссией, или силовыми цилиндрами гидросистемы самолета. При механической трансмиссии поверхности управления перемещаются винтовыми механизмами, вращение которых от привода передается через угловые редукторы вращающимися валами. Каждая секция закрылка, интерцептора и другой отклоняющейся поверхности перемещается двумя винтовыми механизмами и силовыми цилиндрами. Приводом пилот управляет дистанционно с помощью механической (тросовой) или электрической проводки.
Для защиты трансмиссии от перегрузки в нее включают ограничители крутящих моментов и эластичные муфты. По концам трансмиссии устанавливают датчики асимметрии поверхности управления. Асимметричное перемещение, например, в случае обрыва вала трансмиссии, может привести к крену самолета, который с помощью элеронов не всегда можно парировать. Система защиты от асимметрии сравнивает положение левых и правых поверхностей управления и при наличии разности отклонения выше допустимой прерывают цепь управления приводами. Валы трансмиссии пустотелые, имеют промежуточные опоры, гермовыводы в местах выхода из фюзеляжа в крыле, карданные соединения для компенсации неточностей сборки и отклонения осей. В систему управления механизацией входит также система сигнализации и контроля положения.
| <== предыдущая страница | | | следующая страница ==> |
| Конструкция и работа систем управления самолетом | | | Турбореактивный двигатель |
Дата добавления: 2014-10-10; просмотров: 926; Нарушение авторских прав

Мы поможем в написании ваших работ!