Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Где tп – продолжительность паузы, зависящая от времени загрузки и разгрузки сосудов, с
Часовая производительность подъёмной установки может быть обеспечена большим диапазоном вместимостей подъёмных сосудов. Наиболее выгодная должна соответствовать минимальным годовым расходам по капитальным и эксплуатационным затратам для заданных условий.
Наибольшее распространение получила формула проф. Г. М. Еланчика по определению оптимальной грузоподъёмности скипов для угольных шахт.
mоп = Аг , кг;
, кг;
Число подъёмов в час (число циклов) будет равно:
nч =  .
.
Время, затрачиваемое на один цикл подъёма и продолжительность движения сосудов:
Тц =  , с. Т = Тц – tп, с.
, с. Т = Тц – tп, с.
Средняя скорость движения подъёмных сосудов:
Vср =  , м/с.
, м/с.
Ориентировочная максимальная скорость:
Vmax ор = aVср, м/с;
где a - множитель скорости; ориентировочно принимается 1,15 ¸1,20 для клетевых подъёмов и 1,20 ¸1,25 для скиповых подъёмов.
Определим максимальную фактическую скорость Vmax. фак.. Для этого определим необходимую частоту вращения барабана:
nб = , мин-1.
, мин-1.
Частота вращения двигателя определится:
nдв = nб ∙ U, мин-1;
где U – передаточное число редуктора определяется по паспорту принятой подъёмной машины. Затем подбирают наиболее близкую (большую) к стандартной частоту вращения двигателя и определяют фактическую скорость движения сосудов Vmax. фак.: 
Vmax. фак. = , м/с.
, м/с.
где nc – синхронная скорость вращения выбранного двигателя, мин-1;
S – скольжение двигателя;
U – передаточное число редуктора.
Необходимо чтобы Vmax. фак. ≤ Vmax..
При подъёме-спуске людей по вертикальным выработкам максимальная скорость движения клетей по ПБ не должна превышать 12 м/с, при транспортировании грузов – определяется проектом.
Диаграммы скорости
1. Трёхпериодная – для подъёма с не опрокидными клетями.
2. Пятипериодная – для подъёма с разгрузкой через дно.
3. Семипериодная – для подъёма с опрокидыванием сосудов.
Расчёт трёхпериодной диаграммы скорости
Исходные данные
1. Высота подъёма – Н, м.
2. Расчётная продолжительность движения – Тр, с.
3. Ускорение – а1, м/с2.
4. Замедление – а3, м/с2.
Определяемые величины
1. Максимальная скорость - Vmах, м/с.
2. Время ускоренного движения скипа и путь, пройденный за этот период:


где V0 – скорость движения скипа в разгрузочных кривых, м/с.
3. Время замедленного движения и путь, пройденный за этот период:
4. Путь, пройденный за время равномерного хода и продолжительность этого периода:

h2
t2 = ———, с.
Vm.ф
5. Общая продолжительность движения
Тр = t1 + t2 + t3, с.
Для расчёта диаграммы вычертим её общий вид
Основное уравнение динамики подъёма и диаграммы усилий.
В теории подъёмных установок рассматривают два вида движения: установившееся и неустановившееся. Установившееся движение это движение сосудов с постоянной скоростью или с постоянным ускорением и замедлением, когда отсутствуют их колебания.
Неустановившееся движение сопровождается собственными колебаниями системы, возникающими от внезапного приложения или снятия нагрузки, от скачкообразного изменения момента, передаваемого двигателем, и других причин.
Основное уравнение. Вращающийся момент Мвр, создаваемый подъёмным двигателем в установившемся режиме относительно оси вращения органов навивки каната, затрачивается на преодоление статического Мст и динамического Мдин моментов подъёмной системы относительно той же оси:
Мвр = Мст + Мдин.
Для подъёмной установки с органом навивки постоянного радиуса R
FR = FстR + FдинR или F = Fст + Fдин.
Статическое усилие подъёмной системы Fст представляет собой разность статических натяжений каната поднимающейся Fпод и опускающейся Fоп ветвей каната
Fст = Fпод – Fоп, Н.

Рассмотрим схему подъёмной установки в такой момент времени, когда сосуды прошли путь hх с начала движения их от приёмных площадок.
Натяжение ветвей каната от статических нагрузок, в которые также включены и силы сопротивления движению, будут равны:
поднимающейся ветви каната
Fпод = [mг + mс + p(H– hх) + qhх]g+ wпод, Н;
опускающейся ветви
Fоп = [mс + phх + q(H-hх)]g – wоп, Н;
где wпод и wоп – сопротивления движению поднимающегося и опускающегося сосудов, направленные против направления движения сосудов.
Fcт = [kmг + (p-g)(H – 2hx)]g, Н.
Динамическую составляющую движущего усилия Fдин определяют как произведение приведённой массы движущихся частей подъёмной системы на линейное ускорение:
Fдин = mпа, Н.
Под приведенной массой mп понимается расчётная, приведённая к окружности навивки каната, где имеет место линейное ускорение подъёма, оказывающая такое же инерционное воздействие, как фактически существующие, движущиеся со своим ускорением массы подъёмной системы.
Приведённая масса подъёмной системы:
mп = mг + 2mc + 2Lг. к.р + Lу. к.q + 2m'н. ш. + m'б + m'з.п. + m'p, кг;
где Lг.к. – длина головного (подъёмного) каната, м;
Lу.к. – длина уравновешивающего каната, м;
m'н.ш., m'б, m'з.п., m'p – приведённые массы направляющего шкива, органов навивки, зубчатой передачи, ротора, кг.
Подставляя в формулу Fст и Fдин получим:
F = [kmг + (p - q)(H – 2hx)]g + mпа, Н.
Это уравнение, выведенное впервые акад. М. М. Фёдоровым, называется основным динамическим уравнением подъёмной установки. Оно пригодно для подъёмов с неопрокидными подъёмными сосудами при постоянном радиусе навивки.
Причём при построении диаграммы усилий для трёхпериодной диаграммы скорости будут рассмотрены три случая: системы без уравновешивающего каната (q = 0), система с равновесным уравновешивающим канатом (q = p) и система с тяжёлым уравновешивающим канатом [(q-p)>0].
Необходимость в уравновешивании подъёмной системы устанавливается по значению степени статической неуравновешенности
р∙Н
δ = ———,
k∙Qп
где k – коэффициент вредных сопротивлений в стволе и установке.
Уравновешивание необходимо применять, если δ ≥ 0,5.
Трёхпериодная диаграмма усилий.
Подъёмная система без уравновешивающего каната (q = 0).
В случае, когда q =0 уравнение примет вид:
F = [kmг + p (H – 2hx)]g + mпа, Н.
Характерными точками трехпериодной диаграммы скорости являются:
1 – начало подъёмной операции, 2 – конец ускоренного движения, 3 – начало равномерного движения, 4 – конец равномерного движения, 5 – начало замедленного движения, 6 – конец замедленного движения. Движущие усилия в этих точках соответственно равны F1; F2; F3; F4; F5; F6.
F1 = (kmг + pH) g + mпa1;
F2 = [kmг + p (H – 2h1)] g + mпa1;
F3 = [kmг + p (H – 2h1)] g;
F4 = [kmг + p (H – 2h1 – 2h2)] g;
F5 = [kmг + p (H – 2h1 – 2h2)] g – mпa3;
F6 = (kmг – pH) g – mпа3.
Подъёмная система с равновесным уравновешивающим канатом (q = p).
Для этого случая уравнение примет вид
F = kmгg + mпa, Н.
Трёхпериодная диаграмма, подъёмная система с тяжёлым уравновешивающим канатом (q >p).
В этом случае уравнение имеет вид:
F = [kmг – (q – p)(H – 2hx)] g +mпа
Подъёмные установки с противовесом являются чаще всего вспомогательными и применяются для выдачи породы, обслуживание одного менее загруженного горизонта или для спуска и подъёма груза и людей. Эти установки могут быть оборудованы скипами или клетями.
Подъёмные установки со шкивами трения.
Отличительной особенностью подъёмных установок с движущим шкивом трения является отсутствие жёсткого закрепления каната на орган навивки, как это имеет место при барабанной системе подъёма. Движущее усилие от шкива трения к канату передаётся исключительно за счёт сил трения, возникающих между канатом и желобом шкива.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 115-118, 122-128, 134-
136), рис. 70-71, 77-84.
2. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005 г.
Лекция №31
Тема: «Электрооборудование подъёмных установок»
Определение мощности двигателя подъёмных установок. Выбор электродвигателей. Принципиальная схема включения их в сеть.
Ориентировочная мощность двигателя определяется по формуле
Nор =  , кВт,
, кВт,
где  - коэффициент динамического режима.
- коэффициент динамического режима.
= 1,3 – 1,4 для установок с неопрокидными скипами,
 = 1,4 – 1,5 для установок с опрокидными скипами,
= 1,4 – 1,5 для установок с опрокидными скипами,
= 1,5 – 1,6 – для неопрокидных клетей,
= 1,8 – 2,2 – для установок с опрокидными клетями,
= 1,2 – 1,3 – для многоканатных установок.
Верхний предел относится к статически неуравновешенной системе и малой ёмкости подъёмных сосудов;
k – коэффициент, учитывающий увеличение нагрузки за счёт вредных сопротивлений;
ηр – к. п. д. редуктора;
Nпол – полезная мощность электродвигателя, затрачиваемая на подъём полезного груза с массой mг и средней скоростью Vср = :
Эквивалентная мощность двигателя
Nэкв =  , кВт;
, кВт;
где Fэкв – эквивалентное усилие подъёма, Н.
В общем виде эквивалентное усилие будет:
Fэкв = , кгс;
, кгс;
где F и t – усилие и продолжительность элементарного участка по графику усилий;
Tэкв - эквивалентная продолжительность цикла, с.
Эквивалентная мощность не должна превышать номинальную мощность принятого двигателя.
Для окончательного выбора двигателя необходимо проверить его на перегрузку:
где Fmах – наибольшее усилие на окружность шкива трения, принимается по графику усилий, а также по расчету;
γрасч - расчетный коэффициент перегрузки:
γрасч = 0,75 ∙ γтабл,
где γтабл - табличный коэффициент перегрузки.
Для привода подъёмных машин используют асинхронные электродвигатели и электродвигатели постоянного тока.
Асинхронные электродвигатели серии АКН [А - асинхронный, К – с контактными кольцами (фазный ротор), Н - нормального исполнения], мощностью от 200 до 2000 кВт на напряжение 6кВ и частотой вращения 250-1000 мин-1. АКН-2-18-36-16У45.
Электродвигатели постоянного тока серии П предназначены для непосредственного соединения с ШПМ. П21-85-9К.
При мощности до 1200 кВт однодвигательного и до 2100 кВт двух двигательного электропривода применяют асинхронные электродвигатели, при большей мощности систему генератор-двигатель (Г-Д) или тиристорный выпрямитель – двигатель (ТП-Д) с двигателями постоянного тока.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 323-334), рис. 179-181.
2. Г.Д. Медведев “Электрооборудование и электроснабжение горных предприятий”, Москва,
Недра, 1988г, (стр. 100-108).
3. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005г.
Лекция №32
Тема: «Аппаратура управления, тормозные устройства подъёмных установок».
Назначение и устройство аппаратуры управления, тормозные устройства подъёмных установок.
Аппаратура управления предназначена для обеспечения нормальной работы шахтной подъёмной установки.
К аппаратуре управления асинхронным приводом относятся: воздушный реверсор, реостаты и пусковые резисторы.
Воздушный реверсор РВМ служит для управления статорной обмоткой подъемного двигателя.
Тахогенератор – является датчиком скорости.
Реостаты применяемые для регулирования скорости асинхронных двигателей, бывают металлические и жидкостные.
Металлические реостаты собирают из ящиков сопротивления ЯС-3 с чугунными элементами или КФ со спиралями фехралевой ленты.
Ящик с чугунными элементами серии ЯС имеет 20 элементов, собранных на изолированных шпильках в отдельные секции, помещенные между двумя стальными боковинами.
Жидкостные реостаты изготавливают в нормальном (ЖРН) и во взрывобезопасном (ВЖР) исполнениях для двигателей мощностью соответственно до 2500 и 500 кВт.
Сельсинные командоаппараты являются устройствами для включения и выключения контакторных реверсоров и реостатов асинхронных двигателей.
Станции управления подъемных машин представляют собой открытые панели из изоляционных плит, на которых смонтированы контакторы, реле и вспомогательная аппаратура. Станции управления машин с асинхронным приводом подразделяются на статорные, роторные и динамического торможения.
Тормоза
Различают рабочее и предохранительное торможение.
Рабочим торможением обеспечивается выполнение заданного режима движения подъемных сосудов и остановка их в нужном положении.
Предохранительное торможение необходимо для предотвращения аварии; оно вводится в действие либо машинистом подъема, либо автоматически от аппаратов защиты. При предохранительном торможении одновременно с остановкой машины автоматически отключается от сети подъемный двигатель.
Основными элементами тормоза являются исполнительный орган и привод.
Исполнительный орган тормоза современных машин является общим для рабочего и предохранительного торможения и представляет собой тормозные балки с закрепленными на них пресс-массовыми колодками, действующими на стальные тормозные ободы органа навивки. Подъемная машина имеет два тормозных обода и на каждый из них действует индивидуальный исполнительный орган.
Тормоза бывают с угловым и поступательным перемещением колодок.
Первая конструкция проста, но при ней неравномерно аспределяется давление по окружности тормозного обода. В приводе с поступательным перемещением колодок обеспечивается больший тормозной момент, равномерное распределение давления по тормозному ободу, меньший износ их. В то же время исполнительный орган с поступательным перемещением колодок имеет более сложную конструкцию.
Исполнительный орган тормоза в угловым перемещением колодок (рис. 1) малых и средних подъемных машин состоит из шарнирных тормозных балок 1 с закрепленными на них пресс-массовыми колодками 2, вертикальных балок 3, углового рычага 4 и горизонтальной тяги 5.
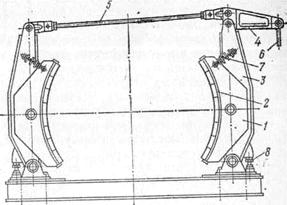
Рисунок 1 – Исполнительный орган тормоза с угловым перемещением колодок.
| 6 9 |
 Тяга 6 связывает исполнительный орган с тормозным приводом. Пружинные регулируемые звенья 7 обеспечивают равномерное распределение зазора между тормозным ободом и колод-
Тяга 6 связывает исполнительный орган с тормозным приводом. Пружинные регулируемые звенья 7 обеспечивают равномерное распределение зазора между тормозным ободом и колод-
ками. Упоры 8 ограничивают перемещение вертикальных балок.
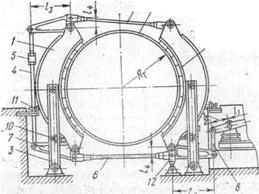
2 Исполнительный орган тормоза с поступательным
перемещением колодок крупных подъемных машин
НКМЗ (рис. 2) состоит из поступательно переме
щающихся тормозных балок 1 с пресс-массовыми
колодками 2, стоек 3, разрезной тяги 4 с
регулирующей гайкой 5, тяг 6, рычагов 7.
С приводом тормоза исполнительный орган связан
штангой 8, при движении которой вверх происходит
затормаживание машины.
Рисунок 2 - Исполнительный орган тормоза с поступательным перемещением колодок.
Привод тормоза бывает: пружинный гидравлический, пневматический грузовой, пружинный пневматический грузовой и пружинный пневматический безгрузовой.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 334-341).
2. 2. Г.Д. Медведев “Электрооборудование и электроснабжение горных предприятий”,
Москва, Недра, 1988г, (стр. 108-109).
3. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005г.
Лекция №33
Тема: «Аппаратура контроля и защиты подъёмных установок».
Назначение и устройство скоростемеров и указателей глубины сосудов в стволе, аппаратуры зашиты предусмотренной на подъёмных установках согласно ПБ.
Указатели глубины и скоростемеры
Указатели глубины, указывающие местонахождение подъемных сосудов в стволе в любой момент подъемной операции, бывают механические и электрические.
Механические указатели глубины колонкового типа непосредственно связаны с валом подъемной машины. Механические указатели глубины не обеспечивают точных показаний и потому в настоящее время они не изготавливаются.
Электрические указатели глубины не имеют механической связи с коренным валом подъемной машины. Они обеспечивают высокую точность определения места нахождения сосуда в стволе. Применение получили сельсинные указатели глубины, устанавливаемые на пульте управления.
В сельсинном указателе глубины УГС-4 (рис. 198) сигнал от сельсина-датчика, механически связанного с валом подъемной машины, поступает на сельсин-приемник 1. Последний передает вращение кольцевой шкале точного отсчета 2 через пару шестерен z1, и z2 с передаточным отношением 1:1. Через систему шестерен z1- z9 с передаточным отношением 1 : 100 вращение передается также визиру грубого отсчета 3. Конечным и другим контролируемым положениям сосудов соответствует совпадение меток на визире, кольцевой и неподвижной 4 шкалах. Метки наносят цветными карандашами. Визир грубого отсчета за цикл подъема делает не более одного оборота, а кольцевая шкала точного отсчета - более 100 оборотов. С визиром связаны две стрелки 5, позволяющие наблюдать начало перехода машины на замедление. Контрольная лампа 6 сигнализирует о последнем обороте шкалы точного отсчета. По окружности шкалы установлены лампы подсветки 7.
Скоростемеры показывают величину скорости в любой момент движения подъемных сосудов и записывают диаграмму изменения ее.
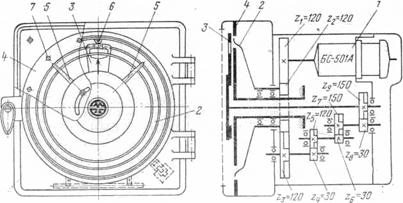
Рисунок 1 – Указатель глубины УГС-4
Скоростемеры бывают механические, имеющие непосредственную связь с коренным валом подъемной машины, и электрические, не имеющие такой связи.
На подъемных машинах старых выпусков применяют механические ртутно-поплавковые скоростемеры СШ-1.
На пультах управления современных подъемных машин устанавливают электрические скоростемеры, в качестве которых применяют самопишущие вольтметры.
Аппарат задания и контроля хода АЗК-1 предназначен для управления подъемными машинами и контроля их работы.
Аппарат АЗК-1 состоит из шкафа с приводом, блока программирования при разъездах на максимальной скорости ВПМ-1, блока программирования при разъездах на пониженной скорости ВПП-1, двух реле контроля вращения РКВ-1 и электрического ограничителя скорости ЭОС-2.
Аппараты защиты необходимы для предотвращения аварий подъемных установок. Эти аппараты в случае возникновения аварийной ситуации включают предохранительный тормоз с одновременным отключением подъемного двигателя.
Конечные выключатели служат для предотвращения переподъема сосудов. Бывают контактные и бесконтактные.
Контактные выключатели устанавливают в аппарате задания и контроля хода, а контакты их включены непосредственно в цепь защиты. Бесконтактные выключатели устанавливают на копре. Наибольшее применение получили магнитные выключатели ВМ. На скипе закреплен магнит.
Ограничители скорости необходимы для того, чтобы не допускать превышение максимальной скорости более 15% по сравнению с расчетной и подхода подъемного сосуда к верхней приемной площадке со скоростью более 1,5 м/с при транспортировании грузов и 1 м/с при спуске-подъеме людей.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 352-364).
2. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005г.
Лекция №34
Тема: «Эксплуатация, техническое обслуживание и ремонт подъёмных установок».
Эксплуатация, техническое обслуживание, ремонт, ревизии и наладки подъёмных установок Требование и ПБ и ПТЭ.
Здание одноканатных подъемных машин имеет зал и подвал. Компоновка некоторых малых машин не требует подвального помещения.
Машинный зал многоканатных установок располагается на копре.
При системе Г-Д зал делится на два помещения: для подъемной машины и для преобразовательной группы.
В машинном зале размещают органы навивки, редуктор, двигатель, распределительное устройство, реверсор, пульт управления, в подвале – роторную магнитную станцию, ящики сопротивления, аккумуляторные батареи аварийного освещения.
В стене здания имеется монтажный проем шириной на 1,2-1,5 м и высотой на 0,5 м больше диаметра органов навивки канатов.
В здании подъемной машины для монтажных и ремонтных работ имеется подъемный кран грузоподъемностью не менее 15 т.
В здании должно быть рабочее и аварийное освещение. Рабочее освещение осуществляется от сети 220 В, аварийное – от аккумуляторных батарей напряжением 12 В. При ремонтах дополнительное освещение осуществляют переносными лампами напряжением 12 В.
Для каждой подъемной установки необходимо иметь: паспорта подъемной машины и редуктора, схему тормоза, принципиальную и монтажную схемы коммутации, инструкцию для машиниста подъемной установки, схемы парашютных устройств, прошнурованные журналы: «Книга осмотра подъемной установки», «Книга осмотра подъемных канатов и их расхода» и «Книга приемки и сдачи смен».
В машинном зале в рамке под стеклом вывешивается инструкция для машиниста, принципиальная электрическая схема управления, схемы тормоза и парашютных устройств.
Подъемная установка находится в ведении главного механика шахты. В обязанность машиниста входит прием-сдача смены, управление, уход и надзор за машиной.
На всех посадочных площадках и в машинном зале должны быть вывешены объявления, в которых указываются: фамилия лица, отвечающего за спуск и подъем людей, условное обозначение сигналов, число людей, одновременно помещающихся в клети, расписание подъема и спуска людей.
Каждый непонятный сигнал должен быть воспринят машинистом как сигнал «Стоп», после чего он выясняет причины неясного сигнала. Во время спуска-подъема людей кроме дежурного машиниста присутствует второй машинист, в обязанности которого входит наблюдение за подъемом и спуском и принятие необходимых мер в случае нарушения нормальной работы установки. Спуск и подъем людей производят после предварительного перегона клетей вхолостую.
Каждая аварийная остановка машины, а также все замеченные повреждения должны быть записаны машинистом в журнал. Машину можно пускать в ход после того, как установлена причина предохранительного торможения.
Для подъемных установок приняты следующие виды осмотров:
- ежесменный осмотр (приемка-сдача смены), производится машинистами с участием дежурного слесаря; продолжительность осмотра 15-20 мин;
- ежесуточный осмотр, производится бригадой под руководством механика подъема; осмотру подлежат подъемные сосуды, проводники, загрузочные и разгрузочные устройства, направляющие шкивы, все агрегаты и узлы подъемной машины; результаты осмотра записывают в «Книгу осмотра подъемной установки».
Продолжительность осмотра устанавливается в зависимости от глубины ствола и должна быть не менее 2,5 ч.
Текущий ремонт производят еженедельно бригадой по осмотру и ремонту подъемной установки под руководством механика подъема. Он заключается в восстановлении или замене быстроизнашивающихся деталей, устранении всех дефектов, замеченных при осмотрах. Для текущего ремонта отводится 2 ч в неделю.
Не реже одного раза в 15 дней главный механик шахты проверяет правильность работы предохранительного тормоза и конечных выключателей защиты от переподъема путем искусственного переподъема на малой скорости.
Ревизию и наладку подъемной установки производят один раз в год специализированной наладочной бригадой при участии представителя энергомеханической службы шахты.
Ревизия и наладка электрической части и аппаратуры автоматизированной подъемной установки производятся один раз в 6 месяцев.
Технический осмотр и испытания проводят через 6 мес после ревизии и наладки. Объем этой работы, выполняемой комиссией под руководством главного механика шахты.
Испытания парашютов производят согласно ПБ один раз в 6 месяцев.
Капитальный ремонт предусматривает остановку подъема на длительное время по графику, составленному главным механиком производственного объединения.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 370-374).
2. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005г.
Лекция №35
Тема: «Проектирование подъёмных установок».
Общая характеристика расчёта подъёмных установок. Ход расчёта.
Исходные данные
1. Глубина шахты.
2. Производительность шахты.
Определяемые величины
1. Выбирается подъёмный сосуд.
2. Выбор каната, подъемной машины, шкивов.
3. Расчёт элементов расположения подъёмной установки, относительно ствола шахты ( высота копра и др.).
4. Расчёт кинематики.
5. Расчёт динамики.
6. Выбор двигателя.
7. Расчёт реостата.
8. Выбор аппаратуры управления, сигнализации, защиты.
9. Определение технико-экономических показателей.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г, (стр. 378-386).
| <== предыдущая страница | | | следующая страница ==> |
| Многоканатные подъёмные машины | | | Тема 1. Сущность стратегии. Место и роль стратегии в управлении фирмой |
Дата добавления: 2014-02-27; просмотров: 1311; Нарушение авторских прав

Мы поможем в написании ваших работ!