Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Принципы управления и классификация САУ
Рассмотрим классификацию САУ по ряду признаков, существенных с точки зрения теории управления. Классификационные признаки, характеризующие понятия, относящиеся к принципам управления, выделим на основе анализа факторов, определяющих алгоритм или закон управления, т.е. выработку и осуществление управляющих воздействий. Большинство этих факторов удобно показать на примере типовой функциональной схемы САУ (рис. 1.5). Результаты этого исследования представлены в табл. 1.2.
Таблица 1.2 - Признаки классификации САУ
| № п/п | Признаки классификации | Принципы управления |
| по степени использования при управлении информации о событиях управления | - с обратной связъю; - без обратной связи | |
| по степени использования при управлении информации о возмущениях | - по возмущениям; - комбинированные | |
| по степени использования при управлении информации о параметрах и структуре объекта управления | - адаптивное (беспоисковое, поисковое, с идентификацией); - с переменной структурой; - неадаптивное | |
| по степени определенности преобразований координат в системе управления | - детерминированное; - стохастическое | |
| по виду математической модели преобразований координат в системе управления | - линейное; - нелинейное (релейное, логическое и др.) | |
| по виду управляющих воздействий | - аналоговое (непрерывное); - дискретное (прерывистое, импульсное, цифровое) | |
| по степени участия в управлении человека-оператора | - ручное; - автоматизированное; - автоматическое |
Многие САУ создаются на основе комплексирования нескольких принципов управления, поэтому допустимы составные определения, например цифровое управление с идентификацией.
Рассмотрим более детально принципы управления и связанную с ними классификацию САУ. Будем использовать при этом типовую функциональную схему, представленную на рис. 1.6, б.
I. По виду задающего сигнала.
Выделяют частный, но широко распространенный тип САУ, которые называются системами автоматического регулирования (САР).
Система автоматического регулирования - это САУ, задачей которой является поддержание выходной величины у на заданном уровне g, т.е. поддержание равенства у-g.
В зависимости от характера задающего воздействия САР делятся на три вида:
- системы автоматической стабилизации - задающий сигнал постоянен во времени - g(t)=const, а выходная величина y поддерживается на уровне заданного значения (y(t)=const);
- системы программного управления - задающий сигнал g(t) зависит от известной задающей программы. Это, например, устройство числового программного управления станком;
- следящие системы - изменение задающего сигнала происходит по неизвестному закону, заданному тем или иным способом. Это различные системы наведения с РЛС, системы телеуправления и самонаведения, автопилоты, целеуказатели курса летательных аппаратов (ЛА) с РЛС и другие САУ движением летательных аппаратов.
Управляющее устройство в САР принято называть регулятором, объект управления - объектом регулирования (ОР), а выходную величину - регулируемой величиной.
II.По топологии функциональной схемы (по степени связности процессов в объекте и степени сложности структуры объекта управления) различают следующие виды САУ (рис.1.7):

Рис.1.7 - Классификация САУ по топологии схемы
- одноконтурные САУ - с одной регулируемой величиной (системы включают в себя один канал обратной связи) – одномерные САУ;
- многоконтурные САУ - с одной регулируемой величиной (включают в себя один канал главной обратной связи и несколько каналов местной обратной связи) и многоконтурные САУ с несколькими регулируемыми величинами (содержат несколько каналов главных обратных связей и также могут быть местные обратные связи) - многомерные САУ.
Многомерные САУ, в свою очередь, подразделяются на:
- многоконтурные несвязанные системы - это такие системы, в которых УУ (регуляторы) не связаны между собой вне объекта управления;
- многоконтурные зависимые системы - это системы, в которых изменение одной величины приводит к изменению других регулируемых величин;
- многоконтурные независимые - это такие системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин;
- многоконтурные связанные системы - это такие системы, в которых УУ (регуляторы) связаны между собой вне объекта управления;
- многоконтурные автономные связанные системы - это системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин (обычно за счет компенсирующих связей);
- многоконтурные неавтономные связанные системы - это системы, в которых изменение одной регулируемой величины ведет к изменению других регулируемых величин.
Приведенные определения многоконтурной независимой системы и многоконтурной автономной связанной системы совпадают. В этой связи принято называть входящую в состав многомерной системы управления (как связанной, так и несвязанной) отдельную систему управления автономной, если управляемая ею выходная координата объекта не зависит от значений остальных его координат.
III. По воздействию чувствительного элемента на регулирующий орган различают системы прямого и косвенного управления.
Системы прямого управления – это такие системы, в которых происходит непосредственная передача воздействия чувствительного элемента на регулирующий орган. Например, регулятор И.И. Ползунова.
Недостаток такой системы очевиден, так как необходимо достаточно большое количество энергии для передачи воздействия чувствительного элемента на регулирующий орган. Однако такой энергии часто не имеется. Кроме того, реакция регулирующего органа на чувствительный элемент снижает его чувствительность и значительно уменьшает точность работы системы.
Поэтому, если необходима повышенная точность управления и нет достаточной энергии для прямого управления, применяют системы косвенного управления.
IV. По виду зависимости регулируемой величины от внешнего воздействия различают статические и астатические САУ.
Статические САУ - это системы, в которых при возмущающем воздействии выходная величина y(t) по окончании переходного процесса принимает значения, пропорциональные возмущающему воздействию. В этих системах статическое звено САУ имеет между выходной и входной величинами строго определенную функциональную связь, которую принято называть статической характеристикой у=F(x).
Астатические САУ - это системы, в которых при возмущающем воздействии и окончании переходного процесса разность между заданным и текущим значениями выходной величины равна нулю.
V. По характеру внутренних динамических процессов.
Основными признаками деления САУ на большие классы являются следующие:
1) непрерывность или дискретность (прерывистость) динамических процессов во времени;
2) линейность или нелинейность уравнений, описывающих динамику процессов управления (регулирования).
Названные классификационные признаки соответствуют признаку 5 в табл. 1.2 - вид математической модели преобразования координат в САУ и признаку 6 - вид управляющих воздействий.
Рассмотрим эту классификацию подробнее.
По виду воздействия регулирующего органа или исполнительного элемента или управляющего устройства на объект управления, т.е. по виду управляющих воздействий, различают непрерывные (аналоговые) и дискретные (прерывистые) системы.
В системах непрерывного управления между выходной и входной величинами существует определенная непрерывная функциональная связь y=F(g), где F является аналитической непрерывной функцией. В общем случае непрерывной динамической системы. F представляет собой оператор системы, частными случаями которого являются функционал и дискретная функция (оператор) F(g).
Дискретные системы подразделяются на системы релейного действия, импульсные и цифровые системы.
В системах релейного действия в структуре системы имеются один или несколько релейных элементов (РЭ) - элементов порогового действия типа 0,1.
Импульсные САУ характеризуются наличием импульсного элемента, выходная величина которого представляет собой последовательность импульсов. Один из параметров импульса (амплитуда, длительность, момент начала действия импульса) является функцией входной величины.
Существует много модификаций импульсных САУ, различающихся по принципу модуляции входного сигнала: время-импульсные, широтно-импульсные, амплитудно-импульсные и САУ с комбинацией этих модуляций.
Цифровые САУ - это САУ, контур управления которых для реализации алгоритмов управления содержит ЭВМ или цифровые вычислительные устройства.
Системы комбинированного типа – аналого-дискретные, дискретно-аналоговые или аналого-цифровые, цифро-аналоговые, представляют собой смешанную реализацию рассмотренных выше структур.
VI. По характеру звеньев, включаемых в САУ различают линейные и нелинейные САУ.
В линейных системах между выходной и входной величинами существует линейная функциональная зависимость (в статическом и динамическом режимах работы).
Процессы, происходящие в этих системах, описываются линейными дифференциальными уравнениями.
В зависимости от вида дифференциального уравнения линейные системы подразделяются на следующие типы:
1) обыкновенные САУ - описываются обыкновенными линейными дифференциальными уравнениями (уравнениями типа вход - выход):

2) САУ с распределенными параметрами - описываются дифференциальными уравнениями в частных производных, например:


где х - пространственная координата;
3) системы с запаздыванием - описываются линейными дифференциальными уравнениями с запаздыванием:
где τ - время чистого запаздывания;
4) системы с переменными параметрами (нестационарные системы) - коэффициенты в уравнениях зависят от времени.
Такие системы описываются например, уравнениями вида:

Отметим, что если ai=const, т.е. параметры системы постоянны, то она называется стационарной. При ai=аi(t) САУ называются нестационарными. Известны также следующие определения.
Стационарной называется система, реакция которой на любой тип возмущения зависит только от интервала между данным моментом времени и моментом начала возмущения.

Для линейных систем всегда выполняется принцип суперпозиции. Для нелинейных систем он не выполняется.
Принцип суперпозиции состоит в следующем.
Пусть y(t)=Atx(t), тогда
 .
.
Нелинейная система – это такая САУ, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики этого звена. Например: произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных или их производных.
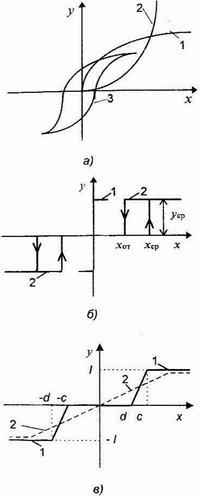
Рисунок 1.8 – Характеристики линейных и нелинейных систем
Все реальные САУ обычно являются нелинейными, но САУ с несущественной нелинейностью характеристик линеаризуют. Несущественно нелинейные характеристики (рис. 1.8, а, кривые 1, 2) не содержат разрывов непрерывности. Существенно нелинейные характеристики содержат изломы, разрывы непрерывности первого рода и т. д. (рис. 1.8, а - кривая 3; б, в). Теория линейных САУ в настоящее время полностью разработана, поэтому целесообразно сводить там, где это возможно, нелинейные САУ к линейным, используя методы линеаризации. Однако нелинейные САУ богаче по своим возможностям, в том числе и в смысле улучшения качества процессов управления.
VII. По степени использования при управлении информации о параметрах и структуре ОУ САУ делятся на адаптивные и неадаптивные.
Адаптивные (самоприспосабливающиеся) системы обладают способностью приспосабливаться к изменению внешних условий, а также улучшать свою работу по мере накопления опыта.
Неадаптивные системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы такой системы ее настройку требуется изменить, для того чтобы сохранить заданное качество управления (например точность, быстродействие), это должен сделать человек.
Область применения адаптивных САУ - это управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны. В этих условиях неадаптивная система либо будет работать неудовлетворительно, либо потребует постоянного надзора.
Адаптивные САУ в свою очередь различаются по степени самонастройки, адаптации, оптимизации и интеллектуализации.
| <== предыдущая страница | | | следующая страница ==> |
| Типовые функциональные схемы САУ | | | Адаптивные системы |
Дата добавления: 2014-11-14; просмотров: 1034; Нарушение авторских прав

Мы поможем в написании ваших работ!