Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Способ, основанный на зависимости между геодезическими и плоскими прямоугольными координатами
Аналитические способы преобразования плоских прямоугольных координат
Этот способ состоит в том, что, имея плоские прямоугольные координаты (x1;y1) точки в одной зоне вычисляются её геодезические координаты (B;L). Затем с учётом разности долгот осевых меридианов соответствующих зон, используя найденные геодезические координаты (В; L′), вновь определяют плоские прямоугольные координаты (X2;y2) точки, но в смежной зоне.
Для 60-градусной зоне L′=L±60, значение широты в соответствии с проекцией Гаусса не изменяется. В этих случаях для описания положения точек берут системных координат обеих смежных зон. Упрощенные формулы перехода от геодезических координат точки к плоским прямоугольным координатам имеют вид:


Значение величин входящих в эти формулы можно показать следующим рисунком (рис. 2.2).
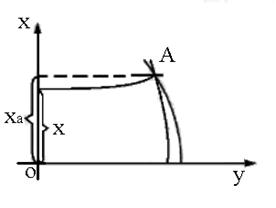
Рис. 2.2. Зависимость геодезических и плоских прямоугольных координат точки
Х- длина дуги меридиана от экватора до параллели данной точки; N- радиус кривизны поверхности эллипсоида; p- значение радиана; l=L-L0-
разность долгот меридиана данной точки и осевого меридиана зоны; В- геодезическая широта точки.
Для преобразования плоских прямоугольных координат из одной 6- градусной зоны в другую могут применяться различные таблицы, в которых даны рекомендации по их применению.
Способ преобразования координат по двум связующим точкам.
Для применения данного способа две или более точки должны иметь координаты в одной и другой системе координат. Такие точки называются связующими. Этот способ чаще всего применяется для преобразования координат из одной местной системы координат в другую.
В основу способа положен перенос начала отсчёта координат одной системы (точка О1) в начало отсчёта другой системы (точка О2) с одновременным разворотом второй относительно первый на угол Q (рис.2 .3)
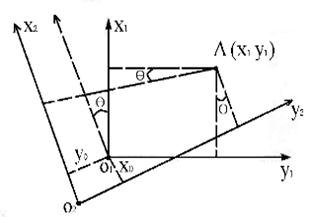
Рис. 2.3. Схема положения точки в разных системах координат
Схема положения точки в разных системах координат. Такая задача решается в аналитической геометрии по следующим формулам:
x2=x0+x1 cosQ- y1sin Q;
y=y0+y1 cos Q+X1 sin Q;
где x0 и y0 координата начала отсчёта новой системы координат;
х1; y1, x2, y2- координаты точки в старой и новой системах координат; Q- угол поворота осей координат.
Задача по преобразованию координат из одной местной системы в другую может быть такой: имеются координаты n- точек в системе координат одной зоны, требуется определить координаты этих точек в системе координат другой зоны. Из всех n- точек две точки, например А и В которые являются связующими имеют координаты в одной и другой системах координат.
Тогда, решив две обратные геодезические задачи для точек А и В по координатам одной и другой системы координат получают два дирекционных угла (αав и αав′) и два горизонтальных проложения (Sав и Sа′в). Затем вычисляют угол поворота осей координат Ө, масштабный множитель m и коэффициенты К1, К2 по формулам:
Ө=αа′в-αав,
m=
К1=m cosӨ, К2=m sinӨ.
Коэффициенты К1 и К2 являются значениями поправок в приращения координат за преобразование координат точек из одной системы координат в другую. Используя эти коэффициенты определяют координаты других (n-2)точек.
Преобразуются так для следующей после точки в координаты точки С будут.
Xc′=XB′+(xc-xB)K1- (yc-yв) К2;
yc′=yв′+(yc-yв)к1+ (хс-хв)к2.
В этих формулах Хв, yв; хс, yс координаты точки В и св системе координат исходной зоны, а хв′ yв′; хс; yc′ преобразованные координаты этих точек.
Таким же образом осуществляется преобразование координат последующих точек.
Лекция 3
| <== предыдущая страница | | | следующая страница ==> |
| Графический способ преобразование координат | | | Виды планово-картографического материала |
Дата добавления: 2014-02-28; просмотров: 866; Нарушение авторских прав

Мы поможем в написании ваших работ!