Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ ЭЛЕКТРОПРИВОДА С ШАГОВЫМИ ДВИГАТЕЛЯМИ
Синхронными называются электрические машины переменного тока, у которых в рабочем режиме угловая скорость ротора равна угловой скорости магнитного поля статора и не зависит от нагрузки. В отдельных случаях скорость ротора кратна скорости поля статора.
В связи с развитием цифровой вычислительной техники разрабатывают и совершенствуют исполнительные элементы дискретного действия и, в частности, электрические шаговые двигатели. Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи. Шаговые двигатели выпускаются мощностью от единиц микроватт до киловатта, т.е. в основном – это микродвигатели и двигатели малой мощности.
Шаговые микродвигатели (ШД) работают в комплекте с полупроводниковыми коммутаторами. Роль коммутатора состоит в переключении обмоток управления ШД с последовательностью и частотой, соответствующими заданной команде. При этом результирующий угол поворота ШД строго соответствует числу переключений обмоток управления, направление поворота – порядку переключений, а угловая скорость – частоте переключений.
Классификация основных типов шаговых двигателей приведена на рис. 4.1.
Шаговые двигатели являются многополюсными машинами. Их можно подразделить на три основные конструктивные группы: с постоянными магнитами (активного типа), реактивные и индукторные. Они могут иметь различное число фаз, но наибольшее распространение получили двух-, трех- и четырехфазные ШД. Напряжение питания обмотки управления шагового двигателя представляет собой последовательность однополярных или разнополярных прямоугольных импульсов, поступающих от коммутатора.
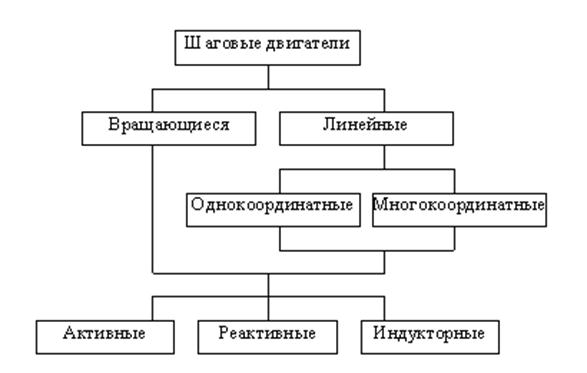
Рис.4.1
Двигатели активного типа. Статор шаговых двигателей имеет явновыраженные полюсы, на которых располагают обмотки управления. Число пар полюсов каждой из обмоток управления рм равно числу пар полюсов ротора. Ротор обычно представляет собой многополюсный постоянный магнит с радиальной намагниченностью.
Принцип действия ШД можно рассмотреть на примере двухполюсного двигателя.
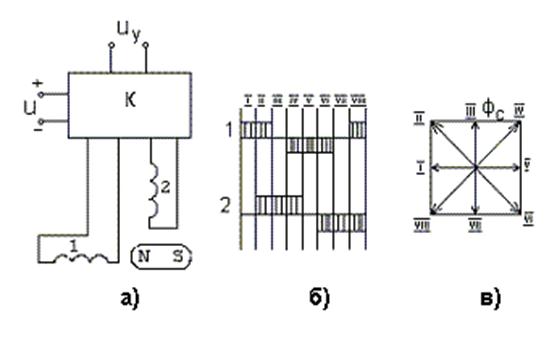
Рис.4.2
На рис. 4.2,а показана схема подключения обмоток управления 1 и 2 двухфазного ШД к коммутатору К. Точками обозначены начала обмоток, U – напряжение питания, Uy – импульсный сигнал управления. На рис. 4.2,б изображена временная диаграмма силовых импульсов напряжения на обмотках управления двигателя при восьмитактной ( I-VIII ), разнополярной системе коммутации. Переход от одного такта к другому соответствует поступлению на коммутатор очередного импульсного сигнала управления. При этом, как видно, скачкообразно изменяется значение или полярность напряжения на обмотках управления.
Рассмотрим более подробно, что происходит в эти моменты времени в двигателе. Во время такта I положительный импульс тока возбуждает обмотку управления 1 (рис. 4.2,а). Магнитный поток статора Фс направлен по оси этой обмотки (рис.4.2,в). Ротор (постоянный магнит NS) притягивается к полюсам обмотки I и занимает положение вдоль ее оси. При переходе к такту II дополнительно возбуждаются полюсы обмотки управления 2. Результирующий поток статора Фc, создаваемый теперь двумя обмотками, скачком поворачивается на 45° (рис. 4.2,в). Возникает синхронизирующий момент синхронного двигателя, и ротор поворачивается на тот же угол. При переходе к такту III остается возбужденной только обмотка 2. Поток статора и ротор поворачиваются еще на один шаг, равный 45°. Положение потока статора на всех восьми тактах показано на рис.4.2, в.
Показанная на рис. 4.2 раздельно-совместная последовательность включения обмоток управления является несимметричной системой коммутации, так как нечетным и четным тактам соответствует возбуждение различного числа обмоток. Результирующий поток статора меняется от такта к такту, что вызывает пульсацию синхронизирующего момента и является недостатком схемы.
Систему коммутации называют симметричной, если на всех тактах возбуждается одинаковое число обмоток управления (раздельно, парами и т. д.). При симметричной коммутации шаг увеличивается вдвое, а результирующий поток статора на всех тактах одинаков.
Величина шага в значительной мере определяет разрешающую способность привода с ШД по отработке углового перемещения во всех режимах работы привода. В общем случае шагом ШД называют угол поворота ротора при воздействии одного сигнала управления и установленной схеме коммутации. В режиме отработки единичных шагов – работе с низкой частотой управляющих импульсов f – положение ротора фиксируется с нулевой скоростью на каждом шаге.
В реальном многополюсном двигателе шаг меньше показанного на рис.4.2 в рм раз и определяется выражением
αш=360°/(Ктк рм). (4.1)
Число тактов коммутации Ктк зависит от числа обмоток управления mу и схемы управления:
Ктк = mу К1 К2, (4.2)
где К1 – коэффициент, равный 1 при симметричной и 2 – при несимметричной коммутации; К2 – коэффициент, равный 1 при однополярной и 2 – при разнополярной коммутации.
Увеличение числа пар полюсов при неизменном диаметре ротора ограничено технологическими возможностями и увеличением потока рассеяния между полюсами, обычно рм =4 ÷ 6. Увеличение числа обмоток управления связано с усложнением коммутатора, обычно mу =2 ÷ 4. Поэтому у активных ШД αш составляет порядка десяти градусов. Дальнейшее уменьшение шага достигается либо механическим редуцированием с помощью специальных кинематических механизмов, либо специальными схемами электрического дробления шага.
Меньшая величина шага – порядка одного градуса – может быть получена у ШД реактивного и индукторного типа. У этих двигателей ротор изготавливается из обычной электротехнической стали, имеет на поверхности зубцы, число которых zp может быть достаточно большим, и
αш=360°/(Ктк zм). (4.3)
Однако у этих двигателей меньше вращающий момент.
Важной характеристикой установившегося режима (f = const) является предельная механическая характеристика — зависимость предельного вращающего момента шагового двигателя Мпред от частоты управляющих импульсов f (рис.4.3).
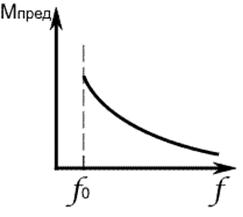
Рис. 4.3
Она определяет тот предел, до которого при данной частоте управляющих импульсов можно плавно нагружать вал ШД, сохраняя при этом синхронный режим. Предельную механическую характеристику рассматривают обычно при ƒ>ƒ0 ,где ƒ0 – частота главного резонанса. С увеличением частоты происходит уменьшение вращающего момента ШД, т.к. токи и потоки в обмотках управления все сильнее не успевают достигать установившихся значений за время такта.
Важным показателем переходных режимов (f = var – пуск, реверсирование, торможение) является приемистость ШД. Приемистость пуска – это наибольшая частота управляющих импульсов, отрабатываемых шаговым электродвигателем без потери шагов при пуске из состояния фиксированной стоянки под током.
Скачкообразное увеличение частоты управляющих импульсов при пуске от нуля до рабочей частоты приводит к тому, что в начале ротор отстает от МДС статора под действием момента инерции вращающихся частей. По мере ускорения он достигает угловой скорости МДС статора и за счет запасенной кинетической энергии может опередить МДС. Постепенно колебания затухают, и двигатель переходит в установившийся режим. Таким образом, в процессе пуска может возникнуть расхождение между числом шагов ротора и МДС статора. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага и момента инерции вращающихся частей; момент трения отрицательно влияет на приемистость.
По аналогии могут быть введены понятия приемистости торможения и реверсирования, их значения несколько отличаются от приемистости пуска.
Дата добавления: 2014-03-11; просмотров: 527; Нарушение авторских прав

Мы поможем в написании ваших работ!