Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Принцип обратной связи. Регулирование по отклонению
Если сигнал обратной связи, подаваемый на вход системы, пропорционален только значению выходной переменной объекта в любой момент времени, то обратная связь называется жесткой. Если же сигнал обратной связи, подаваемый на вход системы, появляется не только при изменении выходной переменной объекта, но и ее производных, то обратная связь называется гибкой.
Если главная обратная связь жесткая, то она позволяет сравнить заданное и действительное значения регулируемой переменной и выявить имеющиеся отклонения (рассогласование, сигнал ошибки). Полученное отклонение поступает на вход регулятора, обеспечивающего поддержание выходной переменной на заданном уровне. Такой принцип называется регулированием по принципу отклонения регулируемой переменной от заданного значения (принцип Ползунова).
§1.3. Классификация систем автоматического управления в зависимости от идеализации, принятой при их математическом
описании
Точное математическое описание динамических систем представляет собою большие трудности, да и не связано с практической необходимостью.
Успех анализа САУ в значительной мере зависит от того, насколько правильно выбраны их математические модели.
Системы, динамика которых описывается линейными дифференциальными уравнениями, называют линейными системами. Для линейных систем справедлив принцип суперпозиции (наложения).
К нелинейным системам относят все системы, процессы в которых принципиально не могут быть описаны линейными дифференциальными уравнениями, и при их исследовании необходимо пользоваться нелинейными дифференциальными уравнениями.
Системой непрерывного действия называется такая система, в каждом из звеньев которой непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины.
Дискретные системы управления отличаются от непрерывных или аналоговых тем, что сигналы в одной или нескольких точках этих систем представляют собой последовательность импульсов или цифровой код.
Непрерывные системы описываются дифференциальными уравнениями, дискретные - дифференциально-разностными, а дискретно-непрерывные - как теми, так и другими уравнениями.
Стационарной называется такая система, реакция которой на любой данный тип возмущения зависит только от интервала времени между данным моментом времени и моментом начала действия возмущения.
Автоматические системы управления называют стационарными, если они при постоянных внешних воздействиях описывается уравнениями, не зависящими явно от времени. Это означает, что свойства системы во времени не изменяются. В противном случае система называется нестационарной. Для линейных систем можно дать также следующие определения: стационарными линейными системами (звеньями) называют системы (звенья), которые описываются линейными уравнениями с постоянными коэффициентами; нестационарными линейными системами (звеньями) или системами с переменными параметрами - системы, звенья которых описываются линейными уравнениями с переменными коэффициентами.

Рис. 1.3.1. Классификация систем автоматического управления в зависимости от идеализации, принятой при их математическом описании.
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ (АСУТП).
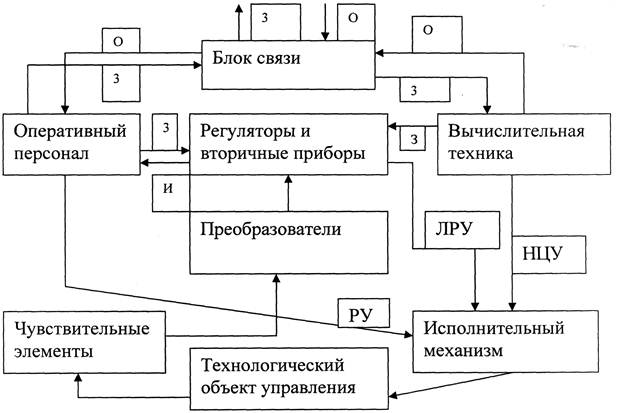
О - отчет;
3 - задание;
И - информация;
РУ - ручное управление;
ЛРУ - управление при помощи локальных регуляторов;
НЦУ - непосредственно цифровое управление
| <== предыдущая страница | | | следующая страница ==> |
| Принцип разомкнутого управления | | | ОСНОВНЫЕ ФУНКЦИИ АСУТП |
Дата добавления: 2014-03-11; просмотров: 585; Нарушение авторских прав

Мы поможем в написании ваших работ!