Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Динамические характеристики элементов
| /^ |
| йХвых JL |
Изменения регулируемой величины во времени в результате того или
иного возмущающегося воздействия вызванных этим возмущением действия
регулятора называют процессом регулирования или переходным процессом
(динамический режим).
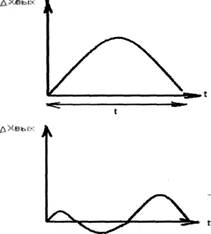
На рисунках представлены кривые переходных процессов вызванное как возмущением (А и Б, В, Г), так и изменением задания регулятору (Д и Е).
Пик выше пунктирной линии (точки задания) называется перерегулирование, на 20% выше задания (не больше).
График А - апериодически сходящиеся. Допустим, если Хмах < Хмах допустимого.
График Б - затухающий колебательный. Допустим: tp < tp допустимого.
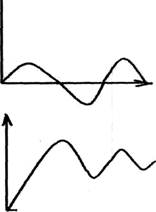
График В - не затухающий колебательный. Допустим с малой амплитудой.
График Г расходящийся колебательный. Может быть допустим в системах автоматического регулирования (САР).
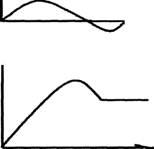
График Д - апериодически в результате управляющего воздействия.
График Е - колебательный в результате управления воздействия.
При изменении задания, отклонения отсчитывается от нового
установившегося значения, т.е. от оси абсцисс переносится в другую точку.
Если система в результате управляющего воздействия приходит к
равновесному состоянию, то она называется устойчивой (А, Б - графики).
В случае если регулируемая величина либо удаляется от значения заданного, либо совершает не затухающих колебаний - система не устойчива.
К САР представляются следующие требования:
1) Устойчивость;
2) Качество переходного процесса (минимальная статическая ошибка, minXmax, min tp)
Чем качественней система, тем она сложнее в реализации, поэтому при расчетах идут на компромисс между стремлением получить наиболее высокое качество регулирования и достичь решения задачи, возможно более простыми техническими средствами
Динамические свойства линейных элементов, а так же САР, часто описываются неоднородными, линейными, дифференциальными уравнениями.
Общий вид этих НЛДУ:

Динамические свойства не линейных элементов и систем описываются
дифференциальными уравнениями в частных производных и таких
уравнений представляющих еще большие трудности.
Поскольку большинство звеньев практически не линейные, для анализа их динамических свойств пользуются некоторыми искусственными приемами, заключающимися в следующем:
1) Не линейную характеристику; если это возможно подвергает линеаризации, т.е. криволинейный участок характеристики заменяют прямым.
2) Пользуясь преобразованием Лапласа сводят решение системы в сложным дифференциальных уравнений к системе алгебраических уравнений, решение которых не представляет трудностей.
| <== предыдущая страница | | | следующая страница ==> |
| Лианеаризация не линейных характеристик | | | Преобразований Лапласа |
Дата добавления: 2014-03-11; просмотров: 419; Нарушение авторских прав

Мы поможем в написании ваших работ!