Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Преобразователь на основе интегрального таймера
Преобразователи входных сигналов для емкостных датчиков
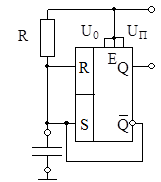
Эти преобразователи используются совместно с чувствительными элементами (датчиками), имеющими емкостный характер выходного сопротивления, изменяющегося под действием измеряемой величины. Выходным параметром преобразователя может служить любая величина электрической природы (напряжение, ток, частота). Последнее обстоятельство определяет вид преобразователя.
С = e×e0× .
.
¦ = =
= , T = R×ln 2×e×e0×. (11.34)
, T = R×ln 2×e×e0×. (11.34)
11.2. Преобразователь сигнала для емкостного датчика
с компенсацией начального значения емкости
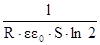
Этот преобразователь предназначен для получения информации об изменении емкости датчика при небольших относительных изменениях емкости. Компенсация начального значения позволяет сформировать передаточную характеристику, при которой выходной сигнал пропорционален абсолютному изменению емкости.
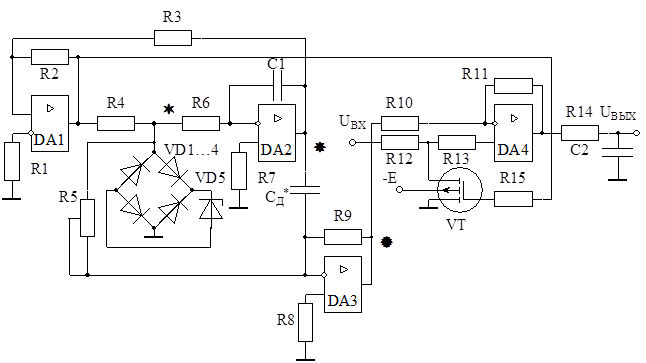 Рис. 11.11
Рис. 11.11
Структура интегратор-компаратор на операционных усилителях DA1 и DA2 формирует систему свазированных прямоугольного и треугольного напряжений. Стабилизация их амплитуды осуществляется двусторонним ограничением на элементах R4, VD1…4. Чувствительным элементом схемы является инвертирующий сумматор на усилителе DA3. На вход сумматора поданы токи резистора R5 и емкости CД*. Оба тока имеют прямоугольную форму и противофазны. Резистор R9 определяет чувствительность преобразователя (коэффициент передачи). Переменный сигнал с выхода инвертирующего сумматора преобразуется в однополярный усилителем со знакопеременным коэффициентом усиления на элементе DA4. Фильтр R14‑C2 устраняет глитчи[1], вызванные переключением VT. Знак коэффициента преобразования определяется типом транзистора VT.
При подобной структуре построения преобразователя в состоянии баланса измерительный сигнал в точке ¬ проходит параллельно через две ветви на вход инвертирующего усилителя:
§ через резистор R5;
§ через инвертирующий интегратор и емкость датчика (интегрирование, дифференцирование и инверсия фазы).
Баланс схемы не нарушается при изменении уровня напряжения в точке ¬. Стабилизация напряжения в точке ¬ нужна лишь для того, чтобы обеспечить стабильность наклона передаточной характеристики.
UВЫХ = |U3|×sign (CД* – С0); (11.35)
uC =  U1×t, iC = CД*×
U1×t, iC = CД*× = U1×CД*. (11.36)
= U1×CД*. (11.36)
U3 = (IR5 + IД)×R9 = U1×R9× . (11.37)
. (11.37)
UВЫХ = sign (СД* – С0)×U1×R9× . (11.38)
. (11.38)
При СД* = С0  =0, откуда
=0, откуда
С0 =  ×С1. (11.39)
×С1. (11.39)
UВЫХ = –U1×R9×. (11.40)
Если представить СД = С0 + DС,
UВЫХ = –U1×R9× = –U1×R9×
= –U1×R9× . (11.41)
. (11.41)
Свойства преобразователя могут быть улучшены установкой на место усилителя со знакопеременным коэффициентом усиления DA4 аналогового делителя на базе четырехквадрантного перемножителя с использованием в качестве сигнала-делителя напряжения U1.
12. Измерительные преобразователи
для резистивных датчиков
Резистивными датчиками обычно являются проволочные термосопротивления, тензорезисторы, а также набор потенциометров.
12.1. Преобразователь сопротивления в напряжение (ПСН)
с источником стабильного тока
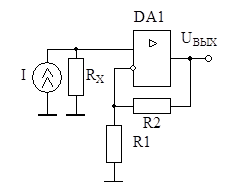
U+ = I×RX.
UВЫХ = U+× = I×RX×
= I×RX× .
.
UВЫХ =  ×RX,
×RX,
K — коэффициент передачи схемы.
Недостатком схемы является малая стабильность коэффициента преобразования, обусловленная стабильностью источника опорного тока.
В качестве источника тока используется полевой транзистор.
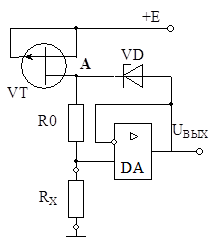
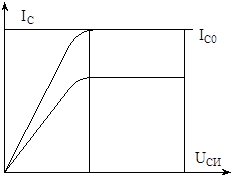
Рис. 12.12
U+ = U– = UВЫХ. (12.44)
UA = UВЫХ + U0. (12.45)
IR0 =  . (12.46)
. (12.46)
U+ = URx = IR0×RX = ×RX. (12.47)
UВЫХ = ×RX. (12.48)
Стабильность коэффициента преобразования схемы зависит от стабильности опорного источника U0. Двумя основными факторами, влияющими на стабильность опорного напряжения, являются:
§ изменение температуры окружающей среды;
§ стабильность тока, протекающего через стабилитрон.
Для устранения влияния температуры в качестве опорного источника следует применять термокомпенсированные стабилитроны (КС191, КС196), имеющие температурный коэффициент напряжения порядка 0,001¸0,005  .
.
Для стабилизации тока через опорный элемент в схеме применим стабилизатор тока на полевом транзисторе. Учитывая, что
IСТ = I – IR0, (12.49)
где IСТ — ток через стабилитрон;
I = const — ток стока полевого транзистора;
IR0 = = const,
IСТ = const. Это позволяет устранить влияние ненулевого динамического сопротивления стабилитрона.
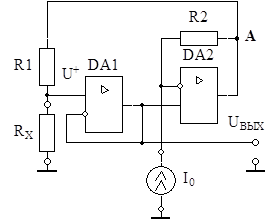
I0 = IR2.
UA = UВЫХ – I0×R2.
UR1 = UA – U+ = –I0×R2.
IRx = IR1 =  = –I0×
= –I0× .
.
U+ = –I0××RX.
UВЫХ = U+ = I0××RX, I0 < 0.
При удаленности измерительного устройства от резистивного датчика возникает проблема получения достоверной информации о сопротивлении датчика, вызванная наличием ненулевого сопротивления подводящей линии. Компенсация сопротивления линии представляет собой значительную трудность, поскольку линия связи и компенсирующие элементы могут находиться в различных температурных условиях.
12.2. Преобразователи сопротивления в напряжение
с четырехпроводной линией связи
а) 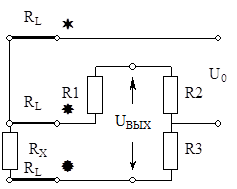 б)
б)
Рис. 12.13
При четырехпроводной линии связи появляется возможность осуществить разделение токового контура “возбуждения” резистивного датчика и контура снятия информации с датчика. Благодаря высокоомности контура снятия информации падение напряжения на проводах линии связи пренебрежимо мало, и на выходе формируется верный измерительный сигнал. При использовании резистивных датчиков с малым относительным изменением сопротивления наибольшее распространение получили мостовые схемы измерения. При использовании мостовой схемы можно применять трехпроводную линию связи (рис. 12.13, б).
Будет предполагать, что сопротивления RL равны для всех плеч моста.
UВЫХ = U0× (12.50)
(12.50)
| <== предыдущая страница | | | следующая страница ==> |
| ПНЧ на основе структуры интегратор-компаратор | | | Механические расходомеры |
Дата добавления: 2014-03-13; просмотров: 330; Нарушение авторских прав

Мы поможем в написании ваших работ!