Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Пуск, реверс и регулирование частоты вращения электродвигателя постоянного тока
Пуск в ход двигателей постоянного тока производится с помощью пусковых или пускорегулирующих реостатов, а также отдельных резисторов, включение которых осуществляется контакторами. Это необходимо для ограничения пускового тока. Двигатели мощностью в несколько киловатт допускается пускать без реостатов и резисторов, т. е. непосредственным (прямым) подключением обмотки якоря к питающей сети, поскольку цепь якоря таких двигателей имеет значительное сопротивление, при котором пусковой ток не представляет особой опасности.
Пусковой реостат рассчитывается на кратковременную работу под током (время разгона двигателей составляет 0,5—1,5 с), пускорегулирующий реостат — на длительную работу под током.
Реверсирование — изменение направления вращения двигателей постоянного тока — можно осуществлять двумя способами:
- изменением направления тока обмотки якоря
- изменением направления тока обмотки возбуждения (представив себе правило левой руки, нетрудно понять, что в том и другом случае ротор двигателя изменит направление вращения).
В большинстве случаев предпочтение отдается первому способу, так как при его использовании необходимо изменить только полярность на зажимах обмотки якоря. При втором способе количество операций увеличивается почти вдвое: необходимо отключить обмотку якоря, переключить полярность на зажимах обмотки возбуждения и подключить обмотку якоря к питающей сети. Если обмотку якоря не отключить от сети, то в момент переключения обмотки возбуждения двигатель оказывается в пусковом режиме (по существу, это режим короткого замыкания).
Одним из основных достоинств двигателей постоянного тока является возможность регулирования их частоты вращения в широких пределах и плавно, как это позволяет схема управления (теоретически — без ступеней перехода от одной частоты к другой).
Частота вращения двигателей постоянного тока независимо от системы их возбуждения выражается следующим образом:
Из формулы видно, что частоту вращения можно регулировать изменением напряжения сети U, падения напряжения Iя(Rпр+r) и магнитного потока Ф.
Напряжение сети можно изменять только в тех случаях, когда двигатель имеет собственный источник электроэнергии (генератор, преобразователь).
Падение напряжения зависит от значения сопротивления пуско-регулирующего реостата.
Магнитный поток — от тока возбуждения и сопротивления реостата возбуждения.
При работе двигателей с номинальной частотой вращения сопротивление Rпр пускорегулирующего реостата всегда равно нулю, т. е. реостат полностью закорочен. Если сопротивление реостата постепенно увеличивать то падение напряжения Iя(Rпр+r) будет также увеличиваться, а разность U — Iя(Rпр+r) уменьшаться. Это связано с уменьшением частоты вращения двигателя от номинальной до нуля, когда U = Iя(Rпр+r). По мере уменьшения сопротивления пускорегулирующего реостата частота вращения двигателя возрастет от нуля до номинальной. Следует отметить, что момент вращения двигателей при таком способе регулирования частоты вращения сохраняется постоянным. Длительное снижение частоты вращения двигателей при номинальной нагрузке допускается только в том
случае, когда они имеют независимую вентиляцию. Основным недостатком данного способа регулирования частоты вращения является большая потеря мощности Iя2 Rпр, которая превращается в тепло, излучаемое пускорегулирующим реостатом.
Цепь возбуждения двигателей параллельного (независимого) и смешанного возбуждения рассчитывается так, чтобы при номинальном токе возбуждения последовательно с обмоткой возбуждения сохранялась включенной небольшая часть сопротивления rр регулятора возбуждения. Если рукоятку регулятора перемещать, уменьшая ею сопротивление, ток возбуждения и магнитный поток Ф будут расти, а частота вращения двигателя — уменьшаться. Если сопротивление регулятора увеличивать, ток возбуждения и поток будут уменьшаться, а частота вращения двигателя увеличиваться. Данный способ позволяет уменьшать частоту вращения двигателя примерно на 20% и увеличивать ее в два раза по сравнению с номинальной частотой вращения. При регулировании частоты вращения данным способом величина противо-ЭДС сохраняется постоянной (поскольку nФ = const). Электромагнитная мощность двигателя также сохраняется постоянной. Вращающий момент двигателя изменяется в зависимости от потока Ф. Значение потери мощности при регулировании невелико.
Практически регулирование частоты вращения двигателей в пределах от нуля до номинальной осуществляется с использованием пускорегулирующих реостатов. Для регулирования частоты в пределах от номинальной и выше используются регуляторы возбуждения.
Регулирование частоты вращения путем изменения магнитного потока Ф двигателей последовательного, возбуждения осуществляется с использованием сопротивлений, включенных по схеме рис. 1.45.
При включении сопротивления R1 параллельно обмотке возбуждения ток нагрузки двигателя I делится на токи I1 и I2, значения которых обратно пропорциональны сопротивлениям Rв и R1. Этим достигается возможность уменьшения тока возбуждения I2 и повышения частоты вращения двигателя. При включении сопротивления R2 параллельно обмотке якоря через обмотку возбуждения проходит ток, величина которого больше на величину тока I3, в результате чего поток увеличивается, а частота вращения двигателя уменьшается. Таким способом получают очень низкие, так называемые ползучие, частоты вращения двигателя.
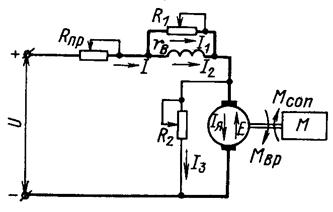
Рис. 1.45. Схема принципиальная двигателя последовательного возбуждения, обеспечивающая все способы регулирования частоты вращения.
Для регулирования частоты вращения двигателя независимого возбуждения используется также система генератор—двигатель (Г—Д), которая представлена на рис. 1.46.
В данной системе частота вращения двигателя nд может регулироваться изменением напряжения генератора U, подводимого к обмотке якоря, и изменением потока двигателя. В первом случае с помощью регулятора возбуждения rр.г изменяется ток возбуждения генератора, во втором случае с помощью регулятора возбуждения rр.д изменяется ток возбуждения двигателя. К достоинствам системы Г—Д относят отсутствие в цепи тока нагрузки двигателя пускорегулирующего реостата, что значительно снижает потери на регулирование. Такая система позволяет регулировать частоту вращения двигателя в очень широком диапазоне и с большой плавностью. Пуск в ход двигателя осуществляется повышением тока возбуждения генератора, а реверсирование двигателя – изменением направления тока возбуждения генератора.
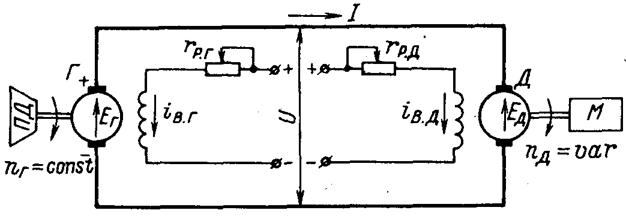
Рис. 1.46. Схема электрическая принципиальная системы Г—Д, обеспечивающая регулирование частоты вращения двигателя независимого возбуждения.
| <== предыдущая страница | | | следующая страница ==> |
| Двигатели последовательного и смешанного возбуждения | | | Потери и кпд машин постоянного тока |
Дата добавления: 2014-04-17; просмотров: 1881; Нарушение авторских прав

Мы поможем в написании ваших работ!