Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Двигатели последовательного и смешанного возбуждения
На рис. 1.39 представлена электрическая схема двигателя постоянного тока последовательного возбуждения. Особенностью данного двигателя является равенство токов обмотки якоря и обмотки возбуждения (Iя = Iв). Это означает, что магнитный поток двигателя зависит от тока якоря (тока нагрузки) двигателя. Последовательно с обмотками включается пускорегулирующий реостат Rnp.
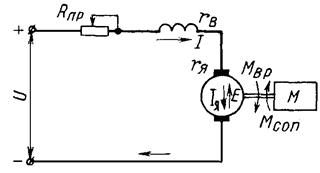 Рис. 1.39 Схема электрическая принципиальная двигателя последовательного возбуждения
Рис. 1.39 Схема электрическая принципиальная двигателя последовательного возбуждения
| 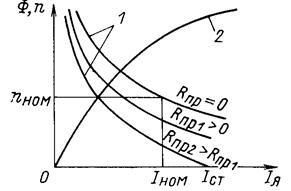 Рис. 1.40. Скоростные характеристики двигателя последовательного возбуждения.
Рис. 1.40. Скоростные характеристики двигателя последовательного возбуждения.
|
Согласно второму закону Кирхгофа для цепи обмотки якоря (и обмотки последовательного возбуждения)
U – E = Iя(Rпр + rв + rя)
Откуда
Путем несложных преобразований можно получить
при Rпр = 0
Этой формулой определяется естественная скоростная характеристика двигателей последовательного возбуждения. При идеальном холостом ходе (Iя = 0) магнитный поток Ф двигателя равен нулю. Это означает, что частота вращения двигателя в режиме холостого хода стремится к бесконечности. Практически при холостом ходе двигатель последовательного возбуждения идет «вразнос», что может привести к его механическим повреждениям (выпучиванию коллекторных пластин, разрыву бандажей, крепящих обмотку якоря, и т. п.). Чтобы не допустить этого, пуск двигателя постоянного тока последовательного возбуждения осуществляют при наличии на валу ротора некоторого момента сопротивления, т. е. при токе якоря, значение которого больше тока холостого хода.
Следовательно, скоростная характеристика двигателя последовательного возбуждения при Iя = 0 уходит в бесконечность (рис. 1.40). Приложив к валу ротора момент сопротивления и постепенно увеличивая его значение, т. е. увеличивая ток якоря и магнитный поток двигателя, можно резко увеличить знаменатель и несколько уменьшить ее числитель (за счет увеличения потерь напряжения в обмотках якоря и возбуждения). В целом можно считать, что частота вращения двигателя при этом изменяется по характеристике 1, близкой к гиперболе, т. е. по кривой, которая является «зеркальным» изображением магнитной характеристики 2 машины (рис. 1.40). При Rnpl > 0 и Rnp2 > Rnp1 значение потерь напряжения Iя (Rnp + rв + rя) увеличивается. Это вызывает снижение частоты вращения двигателя более существенное, чем при Rпр = 0. Таким образом, искусственные (реостатные) характеристики располагаются на графике ниже естественной характеристики (см. рис. 1.40). Приведенные на рис. 1.40 характеристики показывают, что частота вращения двигателей последовательного возбуждения в значительной степени зависит от их нагрузки. Такие характеристики называют мягкими.
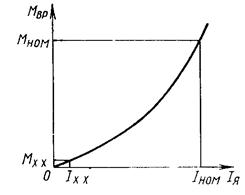 Рис. 1.41. Моментная характеристика двигателя последовательного возбуждения.
Рис. 1.41. Моментная характеристика двигателя последовательного возбуждения.
| 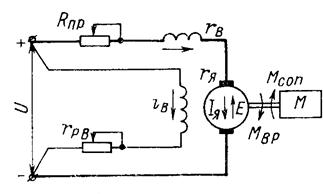 Рис. 1.42. Схема электрическая принципиальная двигателя смешанного возбуждения.
Рис. 1.42. Схема электрическая принципиальная двигателя смешанного возбуждения.
|
Моментная характеристика двигателей последовательного возбуждения определяется формулой Мвр = КмIяФ Поскольку для этих двигателей Ф ≡ Iя, формулу можно представить в виде
Мвр = СмIяФ = 
откуда следует, что значение момента, развиваемого двигателем, пропорционально квадрату тока якоря. Это на графике изображается параболой, проходящей через начало координат (рис. 1.41).
Двигатели смешанного возбуждения имеют как минимум две обмотки возбуждения: последовательную и параллельную (1.42). Одна из них является основной, другая — дополнительной. Принципиально они могут быть включены согласно или встречно. Судовые двигатели смешанного возбуждения имеют, как правило, согласное включение обмоток возбуждения.
Ток параллельной обмотки возбуждения двигателей смешанного возбуждения создает в воздушном зазоре двигателя независимый от нагрузки магнитный поток Фпар. Ток последовательной обмотки возбуждения равен току нагрузки обмотки (якоря) двигателя. Эта обмотка создает зависимый от тока нагрузки магнитный поток Фпос. Общий магнитный поток Ф двигателя равен сумме Фпар + Фпос.
Цепи обмотки якоря двигателя смешанного и последовательного возбуждения аналогичны, поэтому формула оборотов для них:
 – искусственная характеристика
– искусственная характеристика
 – естественная характеристика
– естественная характеристика
На рис. 1.43. представлены естественные скоростные характеристики двигателя смешанного возбуждения. Характеристика 1 соответствует двигателю с основной параллельной обмоткой возбуждения и дополнительной последовательной обмоткой. Характеристика 2 соответствует двигателю с основной последовательной и дополнительной параллельной обмотками возбуждения. В первом случае характеристика жесткая, во втором — мягкая. При Iя и Фпос, стремящимися к нулю, двигатели смешанного возбуждения не идут вразнос подобно двигателям последовательного возбуждения, а работают с конечной частотой, определяемой формулой

что характерно для двигателей параллельного возбуждения.
Моментные характеристики двигателей смешанного возбуждения определяются формулой
Мвр = СмIя (Фпар + Фпос) = СмIяФпар + СI2я.
Если основной обмоткой возбуждения двигателя является параллельная обмотка, то его моментная характеристика приближается к прямой (кривая 1 на рис. 1.44). Если основной обмоткой является последовательная, то моментная характеристика двигателя приближается к параболе (кривая 2 на рис. 1.44).
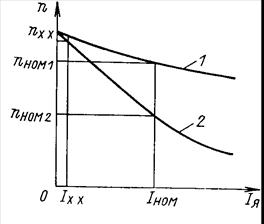 Рис. 1.43. Скоростные характеристики двигателей смешанного возбуждения
Рис. 1.43. Скоростные характеристики двигателей смешанного возбуждения
|  Рис. 1.44. Моментные характеристики двигателей смешанного возбуждения
Рис. 1.44. Моментные характеристики двигателей смешанного возбуждения
|
Все рассмотренные двигатели постоянного тока находят применение в составе электроприводов различных судовых механизмов и устройств. Двигатели независимого возбуждения, например, применяют в гребных электрических установках. Двигатели параллельного возбуждения используют для привода насосов, вентиляторов. Двигатели последовательного и смешанного возбуждения применяют для привода грузоподъемных механизмов.
| <== предыдущая страница | | | следующая страница ==> |
| Двигатели параллельного возбуждения | | | Пуск, реверс и регулирование частоты вращения электродвигателя постоянного тока |
Дата добавления: 2014-04-17; просмотров: 642; Нарушение авторских прав

Мы поможем в написании ваших работ!