Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Двигатели параллельного возбуждения
На рис. 1.36. представлена электрическая схема двигателя постоянного тока параллельного возбуждения, из которой видно, что обмотка возбуждения, так же как и обмотка якоря, подключается на напряжение сети. При этом значение тока возбуждения не зависит от ЭДС и тока обмотки якоря, что характерно также для двигателей независимого возбуждения. Поэтому работа двигателей параллельного и независимого возбуждения принципиальных отличий не имеет.
Двигатели независимого возбуждения изготовляются и применяются в тех случаях, когда, например, обмотка якоря выполняется на высокое напряжение, а обмотка возбуждения — на низкое, когда к обмотке якоря двигателя подается регулируемое напряжение, а также когда обмотка независимого возбуждения является дополнительной к другим обмоткам и выполняет роль управляющей обмотки.
Последовательно с обмоткой возбуждения всегда включается регулятор (реостат) возбуждения, изменение сопротивления которого позволяет изменять значение тока возбуждения и магнитного потока Ф двигателя. Согласно закону Ома для цепи возбуждения двигателя

где U — напряжение питающей сети.
Последовательно с обмоткой якоря включается пусковой реостат.
В тех случаях, когда необходимо регулировать частоту вращения двигателя, последовательно с обмоткой якоря включается пускорегулирующий реостат.
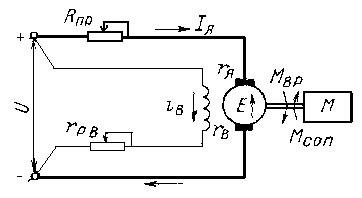
Рис. 1.36. Схема электродвигателя параллельного возбуждения.
Согласно второму закону Кирхгофа, для цепи обмотки якоря справедливо равенство:
U–E = Iяrя+IяRпр
или U = E + Iя(rя+Rпр)
откуда 
где Е – противо-ЭДС двигателя; Rпр – сопротивление пускорегулирующего реостата при Rпр = 0, что соответствует работе двигателя при номинальной частоте вращения
U = E+Iяrя
Это уравнение принято называть уравнением равновесия напряжений двигателя, которое показывает, что напряжение сети U, подведенное к работающему двигателю, всегда уравновешивается напряжением на обмотке якоря.

Так как Е = СеnФ, то при подстановке его значения в приведенные формулы получаем:
U = СеnФ + Iя(rя+Rпр)
откуда частота вращения двигателя

Электромагнитная мощность двигателя
Рэл.м = ЕIя
Вращающий момент двигателя
Мвр = Рэл.м /ω
где ω – угловая скорость ротора двигателя.
Поскольку ω = 2πn/60, то

или Мвр = СмIяФ
где 
Если момент сопротивления механизма обозначить Мсопр, то уравнение равновесия моментов двигателя можно представить в виде
Мвр = СмIяФ = Мсопр.
Свойства всех двигателей постоянного и переменного тока определяются совокупностью пусковых, рабочих, регулировочных и тормозных характеристик. В теории электрических машин рассматриваются лишь основные из этих характеристик.
Пусковые характеристики двигателей характеризуют процесс его разгона от момента пуска (трогания) до момента достижения номинальной частоты вращения (или заданной установившейся частоты вращения). При этом представляют интерес значения кратности пускового тока и пускового момента (по отношению к номинальным), время пуска, стоимость, надежность пусковой аппаратуры и др. Рассмотрим некоторые из этих показателей.
Пуск в ход двигателей постоянного тока обычно осуществляется с помощью пускового или пускорегулирующего реостатов.
Поскольку в момент трогания двигателя n =0, противо-ЭДС обмотки якоря двигателя также Е = 0, значение тока трогания определяется формулой
Iпуск = U/rя
Если, например, напряжение сети U = 220 В, а сопротивление обмотки якоря rя = 0,022 Ом, то в момент трогания двигателя пусковой ток будет равен
Iпуск =220/0,022 = 10 000 А
По существу, это является режимом короткого замыкания.
Если последовательно с обмоткой якоря включен реостат, сопротивление которого, например, Rnр = 1 Ом, то значение пускового тока будет
Iпуск =220/1+0,022 = 215 А
т. е. примерно в 50 раз меньше.
Практически значение сопротивления пускового реостата выбирается таким, чтобы значение пускового тока было в пределах от 1,5 Iном до 2 Iном. Большие значения пускового тока опасны из-за возможности возникновения «кругового огня» по коллектору, выгорания пластин коллектора, перегрева обмотки якоря и т. п.
Значение пускового момента пропорционально значению пускового тока. Время разгона двигателя обратно пропорционально разности пускового момента и момента сопротивления на валу ротора двигателя.
По мере разгона двигателя значение тока непрерывно уменьшается, так как увеличивается значение противо-ЭДС Е.
Рабочими характеристиками двигателей называют зависимости частоты вращения n, вращающего момента Мвр и КПД η от мощности на валу машины Р2 или тока якоря Iя при постоянном напряжении U питающей сети и неизменных сопротивлениях в цепях обмоток якоря и возбуждения:
п = f (P2); Мвр = f (P2); η = f (P2); или п = f (Iя); Мвр = f (Iя); η = f (Iя);
Характеристика п = f (Iя); называется скоростной характеристикой двигателя. Она определяется формулой

При холостом ходе двигателя (Iя = 0) второй член формулы равен нулю.
Тогда
п = пх.х = U/СeФ = const,
так как магнитный поток Ф данного двигателя является постоянным и определяется неизменным значением тока возбуждения iв.
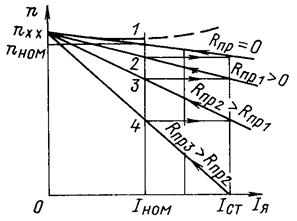
Отложим значение пх.х на оси ординат рис.1.37. Допустим, что Rnp = 0, тогда формула принимает вид:

Приложим к валу ротора двигателя некоторый момент сопротивления Мсопр. При этом согласно уравнению Мвр = СмIяФ = Мсопр.двигатель должен создать на валу вращающий момент Мвр за счет потребления из сети соответствующего тока Iя. В результате частота вращения двигателя будет меньше пx.х на значение второго члена формулы. Дальнейшее увеличение момента сопротивления на валу ротора приведет к повышению тока Iя, потери напряжения Iяrя, и дальнейшему уменьшению частоты вращения ротора двигателя п. Откладывая на оси ординат значения п, соответствующие возрастанию тока Iя, получим наклонную прямую, которая называется естественной скоростной характеристикой (Rnp = 0) двигателя. Судя по этой характеристике, частота вращения двигателя параллельного возбуждения (так же как и независимого возбуждения) незначительно изменяется при колебании нагрузки в пределах от нуля до номинальной. Такая характеристика называется жесткой Когда последовательно с обмоткой якоря включено сопротивление Rпр > 0, то по мере увеличения тока нагрузки второй член формулы растет значительно быстрее, чем в предыдущем случае, и его характеристика будет более наклонной.
При еще большем увеличении Rпр скоростная характеристика еще более наклонна. Точка пересечения характеристики с осью абсцисс отмечает на ней ток стоянки двигателя Iст, значение которого несколько больше Iном. С этой точки начинается пуск двигателя. Постепенным уменьшением сопротивления пускорегулирующего реостата разгон двигателя может быть прекращен в точке 1 естественной характеристики или в точках 2, 3,4 искусственных (реостатных) характеристик.
| 
|
| Рис.1.37. Скоростные характеристики двигателя параллельного возбуждения | Рис.1.38. Моментная характеристика двигателя параллельного возбуждения |
Следует отметить, что с увеличением тока Iя обмотки якоря возрастает размагничивающее действие реакции якоря, в результате чего магнитный поток Ф с некоторого значения тока начинает заметно уменьшаться, что в свою очередь приводит к возрастанию частоты вращения двигателя (пунктирная кривая на рис. 1.37). Для устранения этого явления двигатели параллельного возбуждения часто снабжаются так называемой стабилизирующей обмоткой последовательного возбуждения (с небольшим числом витков). Эта обмотка поддерживает значение магнитного потока двигателя постоянным при изменении тока якоря, намагничивая машину ровно настолько, насколько она размагничивается реакцией якоря.
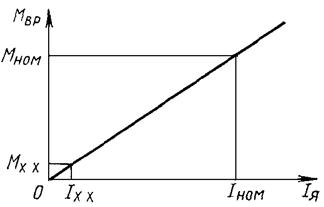
Характеристика Мвр = f (Iя) называется моментной характеристикой. Значение вращающего момента, развиваемого двигателем на валу ротора, пропорционально току якоря. При Iя = 0 момент М = 0, т. е. характеристика теоретически проходит через начало координат, представляя собой прямую линию (рис. 1.38).
Начало координат на рис. 1.37 и 1.38 является точкой идеального (теоретического) холостого хода. После подключения двигателя к напряжению сети в обмотке якоря практически сразу возникает ток холостого хода Iх.х, под действием которого создается электромагнитная сила и момент Mx.х, преодолевающий силы трения и потери мощности в двигателе и вызывающий вращение ротора двигателя с частотой холостого хода пх.х.
| <== предыдущая страница | | | следующая страница ==> |
| Генератор смешанного возбуждения | | | Двигатели последовательного и смешанного возбуждения |
Дата добавления: 2014-04-17; просмотров: 951; Нарушение авторских прав

Мы поможем в написании ваших работ!