Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Регулирование координат электропривода
При управлении движением исполнительных органов технологических установок с помощью электропривода обеспечивается регулирование одной или нескольких координат движения, главная из которых (основная выходная величина) – это угловая скорость на выходе ЭП, т.к. от её значения прямопропорционально зависит производительность технологических установок. Другие координаты чаще вспомогательные – это вращающий момент электродвигателя, ускорения, путь… Процесс принудительного изменения или поддержания на заданном уровне угловой скорости ЭП при изменяющихся внешних воздействиях называют регулированием угловой скорости.
Способы регулирования угловой скорости ЭП.
Регулирование возможно механическими и электрическими способами.
Механические способы регулирования заключаются в изменении угловой или линейной скорости исполнительных органов изменением передаточного числа устройства механической передачи (редуктора), путём применения различных коробок перемены передач, механических вариаторов.
Электрические способы регулирования заключаются в изменении угловой скорости ЭП с помощью устройства управления посредством преобразовательного и передаточного устройств. Энергетические способы прогрессивней, т.к. снижают металлоёмкость технологических установок, компактность, надёжность с повышением уровня автоматизации и качества управления техническими процессами.
Показатели. Основные показатели, характеризующие процесс регулирования угловой скорости ЭП:
· диапазон регулирования,
· плавность регулирования,
· стабильность заданной угловой скорости,
· направления регулирования,
· допустимая нагрузка на разных угловых скоростях и экономичность регулирования.
Диапазон регулирования угловой скорости определяется отношением максимально возможной угловой скорости ЭП  к минимальной
к минимальной  при допустимых пределах её колебания с изменением нагрузки: D =
при допустимых пределах её колебания с изменением нагрузки: D =  Обычно выражается как 2/1, 10/1, 100/1
Обычно выражается как 2/1, 10/1, 100/1
Плавность регулирования угловой скорости характеризуется отношением двух ближайших соседних угловых скоростей  и
и  при переменной нагрузке ЭП и численно оценивается коэффициентом плавности регулирования
при переменной нагрузке ЭП и численно оценивается коэффициентом плавности регулирования  =
=  . При плавном регулировании частоты вращения ЭП этот коэффициент изменяется к единице.
. При плавном регулировании частоты вращения ЭП этот коэффициент изменяется к единице.
Стабильность угловой скорости ЭП определяется жёсткостью механической характеристики электродвигателя и диапазоном изменения нагрузки на его валу. Чем больше жёсткая механическая характеристика двигателя и меньший диапазон колебания нагрузки на его валу, тем стабильнее угловая скорость ЭП, которая численно оценивается её отклонением  от заданного значения, При абсолютно жёсткой характеристике механической – синхронного двигателя и допустимых нагрузках ЭП значение
от заданного значения, При абсолютно жёсткой характеристике механической – синхронного двигателя и допустимых нагрузках ЭП значение 
Направление регулирования угловой скорости ЭП, т.е. увеличение или уменьшение её по отношению к номинальной  , зависит от принятого способа регулирования. Направленный ввод добавочных сопротивлений в силовой цепи электродвигателя, понижает жесткость их механических характеристик, и их угловая скорость при наличии нагрузки на валу понижается. С другой стороны уменьшение тока возбуждения и соответственно уменьшения магнитного потока ДПТ приводящий к увеличению угловой скорости.
, зависит от принятого способа регулирования. Направленный ввод добавочных сопротивлений в силовой цепи электродвигателя, понижает жесткость их механических характеристик, и их угловая скорость при наличии нагрузки на валу понижается. С другой стороны уменьшение тока возбуждения и соответственно уменьшения магнитного потока ДПТ приводящий к увеличению угловой скорости.
Допустимая нагрузка на валу ЭД при разных угловых скоростях его вращения определяется принятым способом регулирования скорости ЭП. Выделяют регулирование при постоянном моменте М=const и при постоянной мощности Р= const. Регулирование скорости ЭП при постоянном моменте М= const целесообразно для производственных механизмов, создающих на валу ЭД постоянный момент нагрузки, независящий от угловой скорости механизма. Это все грузоподъемные и большинство транспортирующих механизмов,
Регулирование угловой скорости ЭП при постоянной мощности Р. = const наиболее оправданно для ЭП главного привода металлорежущих станков. В этих случаях изменением угловой скорости ЭП сила тока ЭД при всех угловых скоростях остается практически неизменной.
Экономичность регулирования угловой скорости ЭП определяется средними значениями энергетических показателей 
 , рассчитанными за определенный период работы ЭП с данными угловыми скоростями.
, рассчитанными за определенный период работы ЭП с данными угловыми скоростями.
 =
= 
Где  и
и  - соответственно полезная (на выходном валу) и потребляемая из сети активная мощность ЭП на i – и ступени регулирования, Вт
- соответственно полезная (на выходном валу) и потребляемая из сети активная мощность ЭП на i – и ступени регулирования, Вт
 - потеря активной мощности на регулирование угловой скорости при работе ЭП i – и ступени регулирования, Вт.
- потеря активной мощности на регулирование угловой скорости при работе ЭП i – и ступени регулирования, Вт.
 – продолжительность работы на i – и ступени регулирования, с
– продолжительность работы на i – и ступени регулирования, с
 – потребляемая из сети активная мощность на i – и ступени регулирования, вар.
– потребляемая из сети активная мощность на i – и ступени регулирования, вар.
Любой процесс электрического регулирования координат ЭП всегда связан с получением искусственных (регулировочных) характеристик двигателя ЭП. Этого достигают на уровне разомкнутых либо замкнутых систем регулируемого ЭП.
Разомкнутые системы регулируемого ЭП.
Разомкнутая система регулируемого ЭП характеризуется тем что на ее вход не подается информация о текущем состоянии выходной величины (например, угловой скорости).

Функциональная схема разомкнутой системой регулируемого ЭП
 – сигнал управления, yy – устройство управления, Прб – преобразователь.
– сигнал управления, yy – устройство управления, Прб – преобразователь.
Поэтому все внешние возмущения в виде, например, изменения момента нагрузки, напряжения питания влияют на выходную координату ЭП, снижая тем самым стабильность её поддержания. По этой причине разомкнутые системы регулируемого ЭП, отличаясь простотой реализацией нашли в основном применение для обеспечения автоматического пуска, то торможения или реверса ЭП, а также в тех случаях, когда не предъявляют повышенные тех. требования к стабильности выходной координаты ЭП.
В разомкнутых системах регулируемого ЭП механическая характеристика и приводные свойства ЭП полностью определяются типом используемого ЭД и принятыми для него параметрами регулирования.
Так для асинхронного ЭП такие параметры (способы) взаимодействия на угловую скорость двигателя – эта частота напряжения (тока) питания, число полюсов обмотки статора, скольжение.
Способ частотного регулирования.
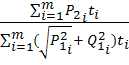
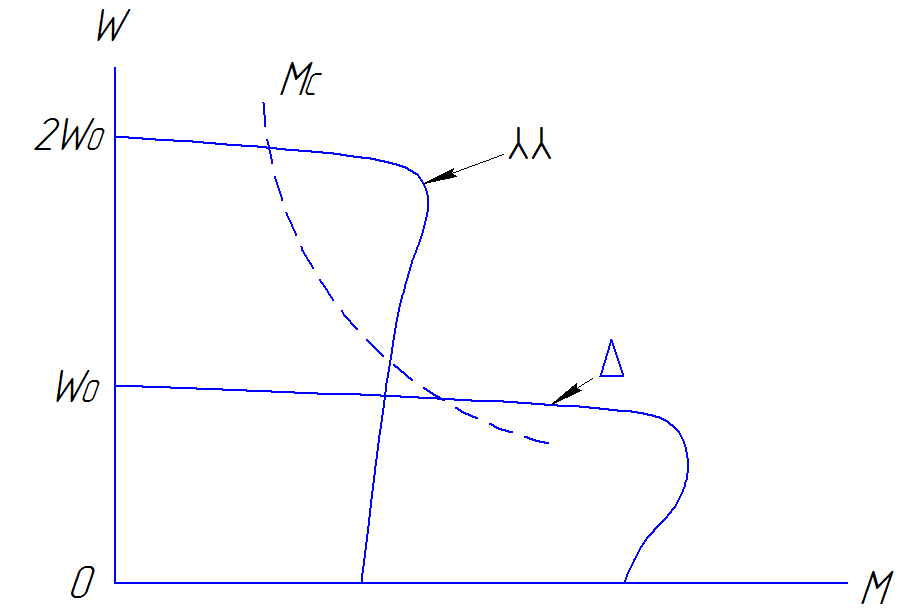
Этот способ экономичный, обеспечивает плавное регулирование частоты вращения (угловой скорости) в широком диапазоне с высокой стабильностью даже в разомкнутых системах из-за высокой жёсткости механической характеристики АД в её рабочей части. При частотном регулировании в состав асинхронного ЭП входит управляемый преобразователь частоты, который обеспечивает заданное изменение частоты и соответствующий этой частоте уровень питающего напряжения АД. Изменять значение напряжения питания АД при изменении частоты необходимо, т.к. значение индуктивного сопротивления двигателя, а значит, и его ток зависят от частоты. При этом для сохранения неизменной перегрузочной способности двигателя (Мк/Мс= const) и высоких энергетических показателей на всех частотах вращения. Закон частотного регулирования АД, предложенный академиком М.П.Костенко, записывают ввиде соотношения:

Где  ,
,  ,
,  номинальное значение напряжения, частоты и момента статической нагрузки на валу АД при номинальной частоте вращения.
номинальное значение напряжения, частоты и момента статической нагрузки на валу АД при номинальной частоте вращения.
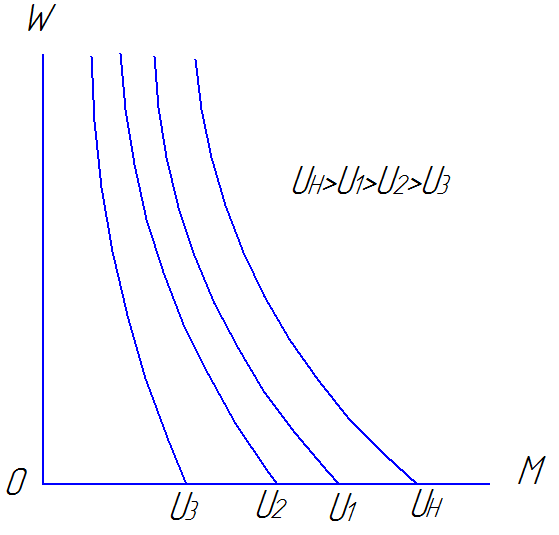
U, f, Mc – те же значения, но при частоте вращения АД, отличной от номинального на рис. Представлены механические характеристики при регулировании по указанному закону частотно регулируемого асинхронного ЭП.
Частотное регулирование угловой скорости
Способ поточного переключения.
Способ поточного переключения обмотки статора используется в многоскоростных АД, которые имеют обмотку статора с изменяемым числом полюсов. Регулирование, как и частотное, экономичное, его широко применяют для ступенчатого изменения частоты вращения (угловой скорости) АД с КЗ ротора. Так как количество пар полюсов АД может быть равным только по целому числу 1, 2, 3 и т.д., то данный способ обеспечивает только ступенчатое регулирование частоты вращения асинхронного ЭП. Чаще всего изменение
числа пар юсов обмотки статора АД получают путём изменения схемы обмотки. Для этого каждая фаза обмотки статора разделена на несколько секций и имеет от них соответствующее число видов. Изменяя схему соединения этих секций статорной обмотки во всех фазах, добиваются различных частот вращения магнитного поля статора, а соответственно и часто вращения ротора АД.
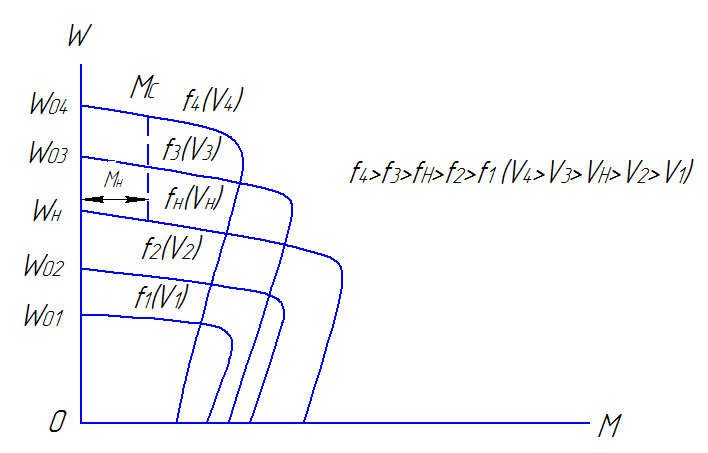
На рисунке показан принцип изменения числа пар полюсов. На примере одной фазы двухскоростного АД.
Стрелками показано условное направление протекания токов в секциях обмотки, а кружками – соответствующее направление магнитных силовых линий в соответствии с правилом “буравчика”.
В двух скоростном АД каждая фаза обмотки статора состоит из двух одинаковых секций (катушечных групп). Если секции соединить последовательно, то образуется максимальное число пар полюсов, условно равная 2р, которому соответствует угловая скорость магнитного поля  (а). При соединении этих же секций встречно последовательно (б) или параллельно (в) количество пар полюсов уменьшается в двое и равно р, а синхронная угловая скорость увеличивается в 2 раза (2 ).
(а). При соединении этих же секций встречно последовательно (б) или параллельно (в) количество пар полюсов уменьшается в двое и равно р, а синхронная угловая скорость увеличивается в 2 раза (2 ).
Наиболее распространенные и целесообразные схемы переключения статорной обмотки двух скоростных АД для основных видов нагрузки ЭП показаны на рисунке
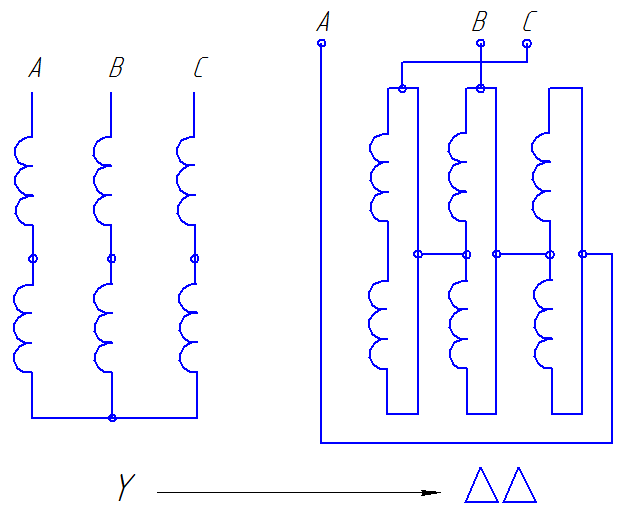
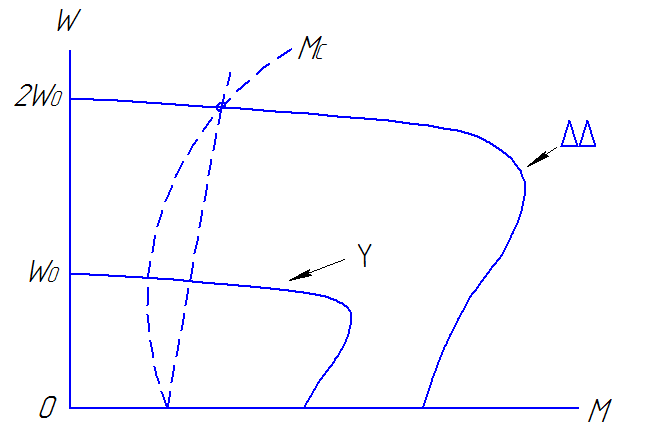
 Т.к. P=M
Т.к. P=M  то т.к
то т.к  в 2р М
в 2р М  2р нагрузка вентиляторная или линейная
2р нагрузка вентиляторная или линейная
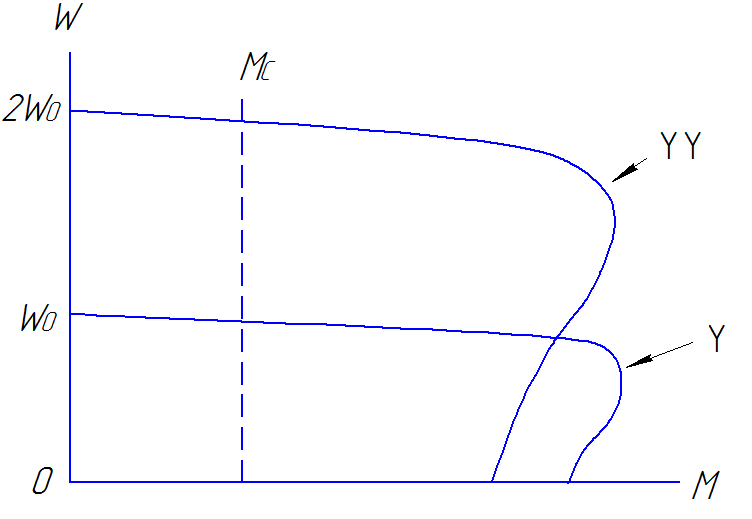
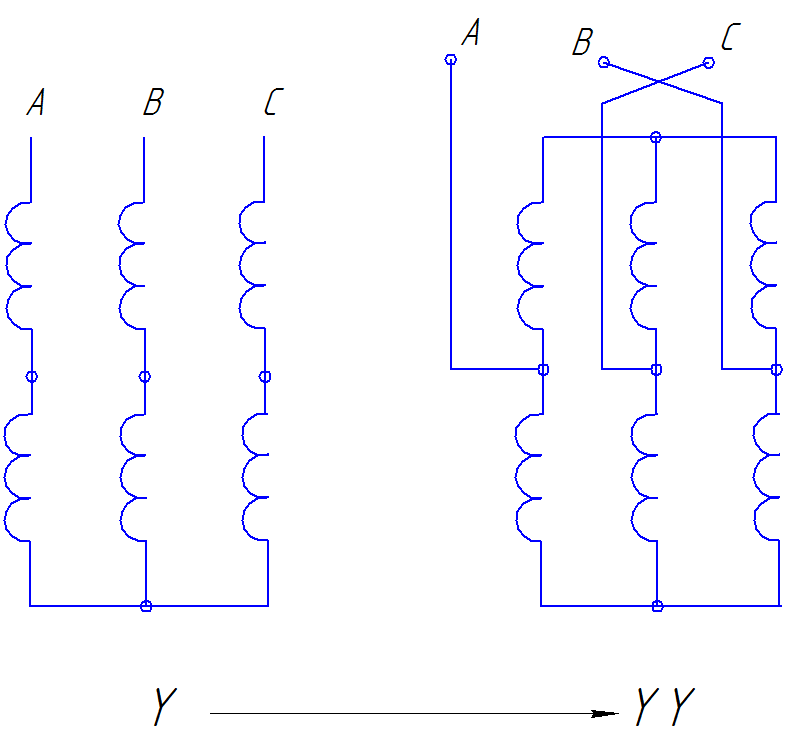
D 
Переключение для главного привода металлорежущих станков


Существенный недостаток многоскоростных АД помимо ступенчатого регулирования угловой скорости – повышенная сложность обмотки статора и сложность ее подключения и коммутации. Например, даже у двух скоростных АД количество выводов обмотки статоров равно 12 , у четырех скоростных – 24 .
Способ изменения скольжения
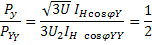
Изменением скольжения можно регулировать частоту вращения асинхронного ЭП, если на валу двигателя имеется нагрузка и АД обладает мягкой механической характеристикой.
Наиболее доступно этот способ реализуется при использовании АД с фазным ротором путем изменения сопротивления трех фазного реостата, включенного во внешнюю цепь обмотки ротора.
Механическая характеристика
Для АД с КЗ ротором регулирования угловой скорости изменением скольжения регулируется в случае применения специальных АД с мягкой механической характеристикой путем регулирования напряжения питания двигателя.
Способ регулирования частоты вращения АД изменением скольжения характеризуется повышенными потерями мощности, т.к. с увеличением скольжения S растут потери мощности DРэл2 обмотки ротора АД, вызывая ее дополнительный нагрев

 – момент нагрузки на валу АД Нм
– момент нагрузки на валу АД Нм
-угловая скорость магнитного поля статор рад/с
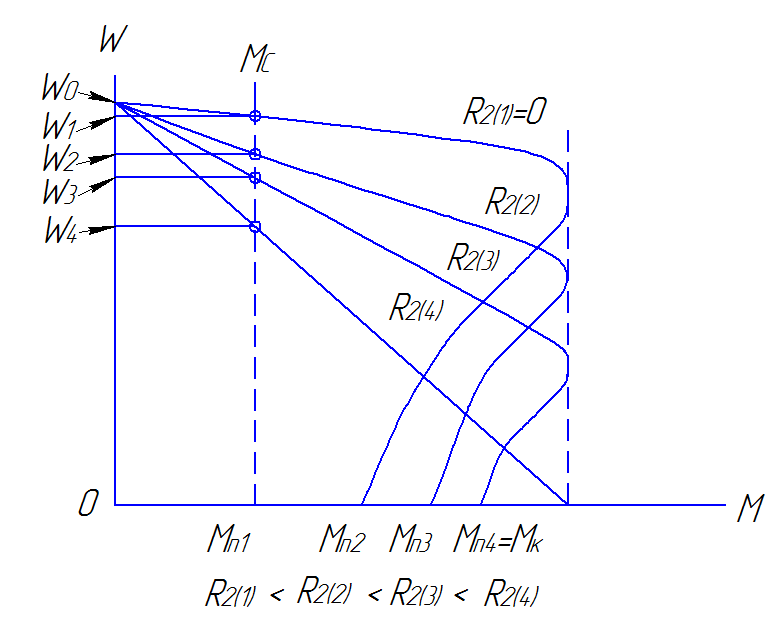
При глубоком регулировании потери мощности в цепи ротора АД становятся преобладающими и КПД двигателя  практически полностью определяется скольжением
практически полностью определяется скольжением

Вместе с тем, данный способ нашел широкое применение в виду доступности и высокой плавности регулирования прежде всего для асинхронных ЭП с вентиляторной нагрузкой. В этом случае с понижением угловой скорости (с увеличением скольжения) существенно уменьшается и момент нагрузки на валу АД, чем обеспечивается достаточное постоянство потерь мощности в роторе и более полное использование АД по нагреву на всех частотах вращения. Диапазон регулирования до 10 :1 и соответственно в таком же диапазоне достигается плавное изменение производительности технологических установок (вентилятора).
Регулирование угловой скорости для ЭП с коллекторными двигателями (ДПТ)
Регулирование их угловой скорости возможно изменением: сопротивления в цепи якоря (параметрическое управление), магнитного потока двигателя (полюсное управление) и напряжения питания цепи якоря(якорное управление).
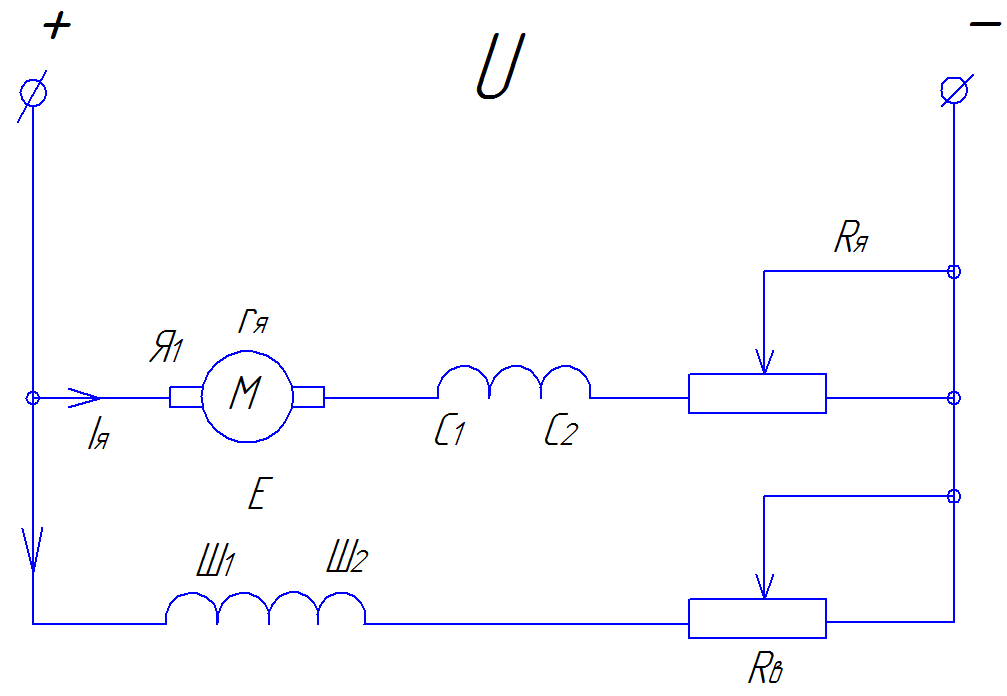
Двигатели постоянного тока могут иметь независимое, последовательное или смешанное возбуждение
Схема включения независимого (параллельного возбуждения)
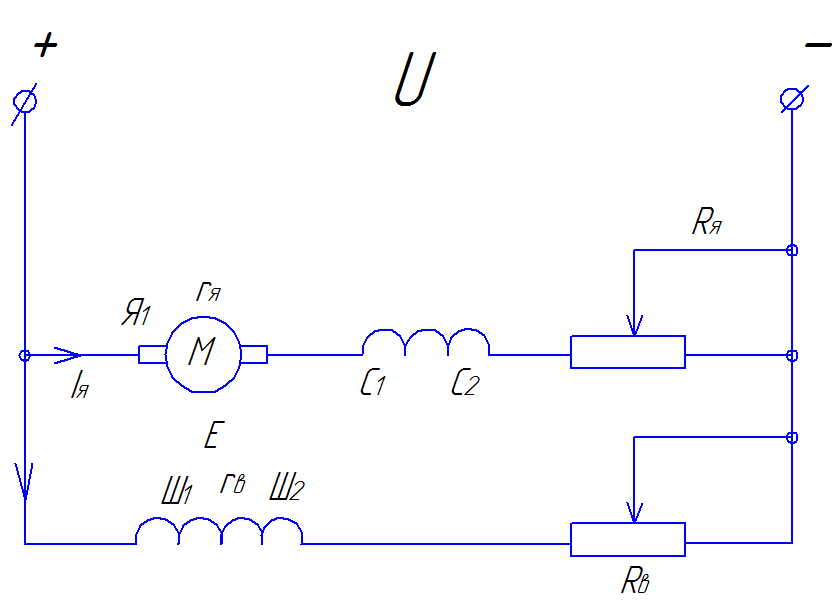 Eя=k
Eя=k 
K= 
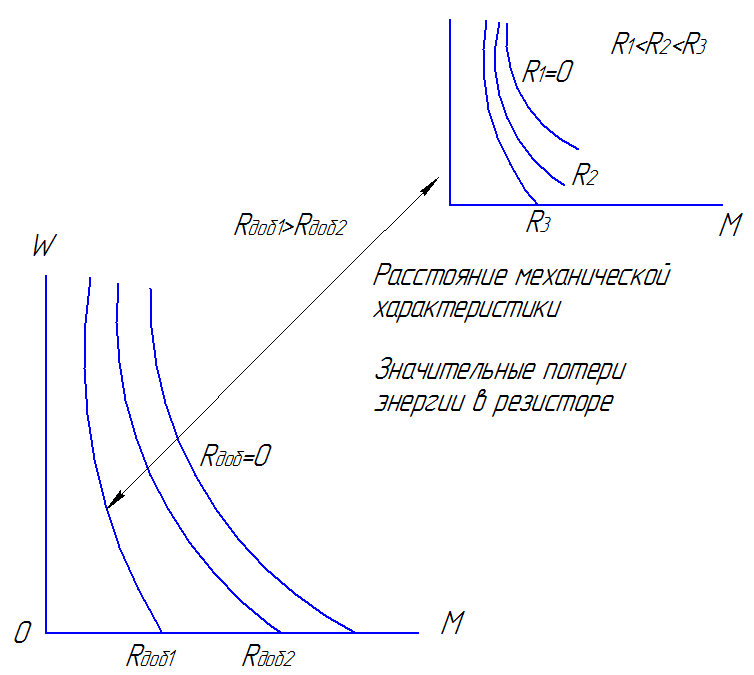
 механическая характеристика привода
механическая характеристика привода

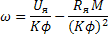
При введении добавочного резистора в цепь якоря скорость холостого хода  останется не изменой, а изменяется наклон механических характеристик , т.е. уменьшается их жесткость. Данный способ регулирования скорости в настоящее время не используется, поскольку введение добавочного резистора сопряжено с потерями энергии в этом сопротивлении
останется не изменой, а изменяется наклон механических характеристик , т.е. уменьшается их жесткость. Данный способ регулирования скорости в настоящее время не используется, поскольку введение добавочного резистора сопряжено с потерями энергии в этом сопротивлении
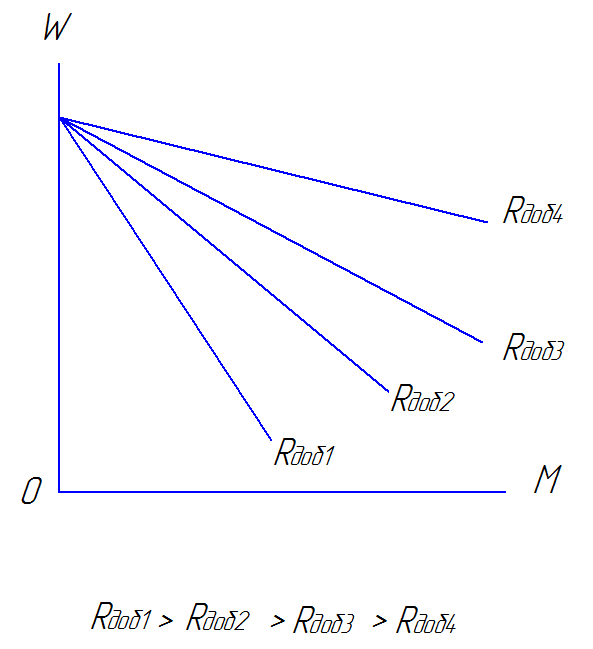
Основным способом регулирования скорости ДПТ – НВ является регулирование напряжения, подводимого к якорю двигателя. При этом скорость лишь уменьшить по сравнению с номинальной, определяемой естественной характеристикой. При уменьшении напряжения якоря уменьшается скорость холостого хода , а жесткость механической характеристики остается постоянной. Повышение напряжения питания выше номинальной не рекомендуется, т.к. это может ухудшить коммутацию на якоре.
При постоянном потоке возбуждения
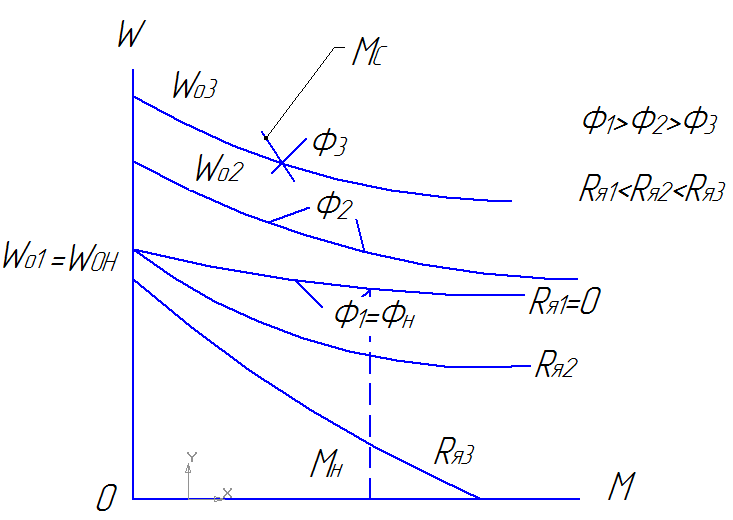
Повышение скорости по сравнению с номинальной проводится уменьшением тока (потока) возбуждения. При уменьшении магнитного потока 
 происходит увеличение скорости х.х. и одновременно снижается жесткость механических характеристик двигателя
происходит увеличение скорости х.х. и одновременно снижается жесткость механических характеристик двигателя  выше
выше  нецелесообразно, т.к. магнитная цепь машины насыщается возрастание магнитного потока не будет существенно, а тепловой режим нарушится.
нецелесообразно, т.к. магнитная цепь машины насыщается возрастание магнитного потока не будет существенно, а тепловой режим нарушится.
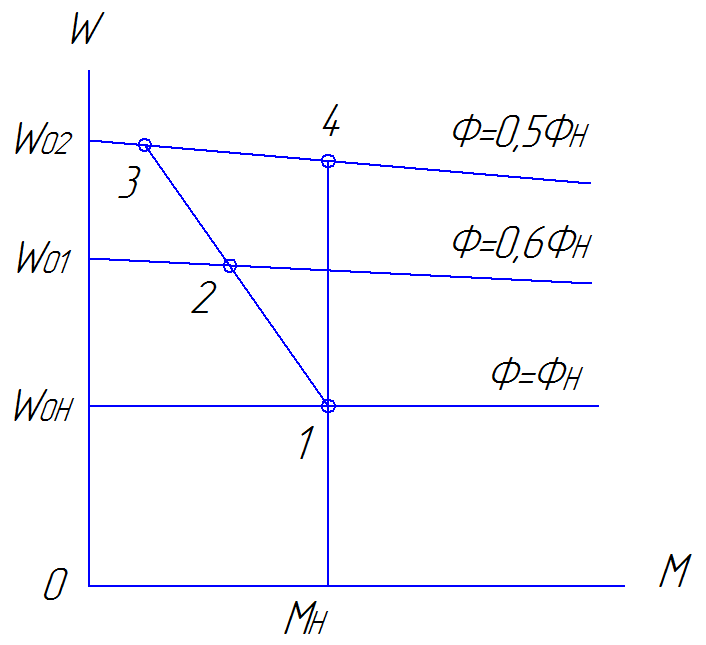
Если Мстат =Мн то при  двигатель будет работать в т. 1.
двигатель будет работать в т. 1.
Если ослабить поток возбуждения в 2 раза то скорость х.х  увеличится в 2 раза.
увеличится в 2 раза.
Мощность на валу постоянна – это преимущество
Если момент двигателя сохраняется постоянным и равным номинальному двигатель будет работать в т. 4.
Однако M=  ток якоря при этом увеличится в 2 раза. По этому длит. работа в т. 4 недопустима. Линия номинального момента при ослаблении поля отображается кривой
ток якоря при этом увеличится в 2 раза. По этому длит. работа в т. 4 недопустима. Линия номинального момента при ослаблении поля отображается кривой
1-2-3.
Двигатели постоянного тока последовательного и смешанного возбуждения.
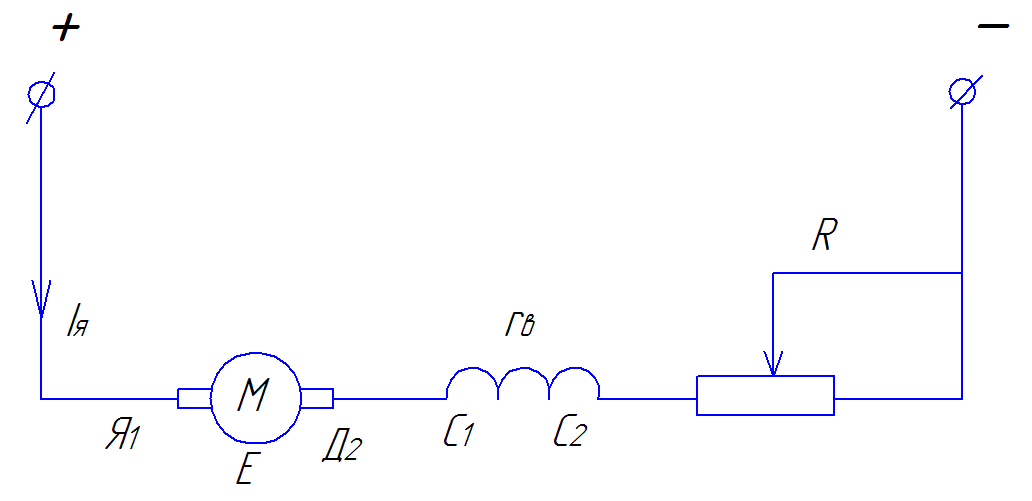
Последовательное возбуждение  , где а=f(Iя) – нелинейный коэффициент.
, где а=f(Iя) – нелинейный коэффициент.
При малых токах якоря а – величина постоянная при  - двигатель насыщается и поток мало зависит от тока якоря.
- двигатель насыщается и поток мало зависит от тока якоря.
Наиболее экономичным изменение Uподв.
Характеристики смещаются в низ по мере  U параллельно естественной характеристике.
U параллельно естественной характеристике.
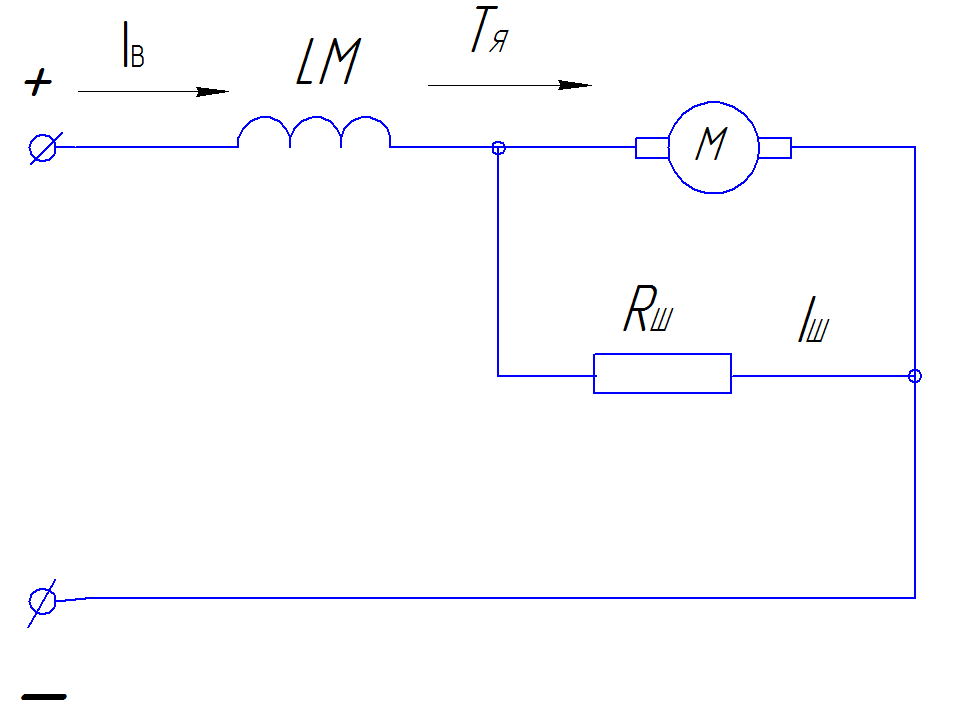
Изменение потока вращения в этих двигателях возможно, если зашунтировать обмотку якоря резистором с сопротивлением Rш, тогда ток возбуждения  , т.е.содержит постоянную составляющую независимую от нагрузки двигателя.
, т.е.содержит постоянную составляющую независимую от нагрузки двигателя.
При этом двигатель приобретает свойство двигателя смешанного возбуждения
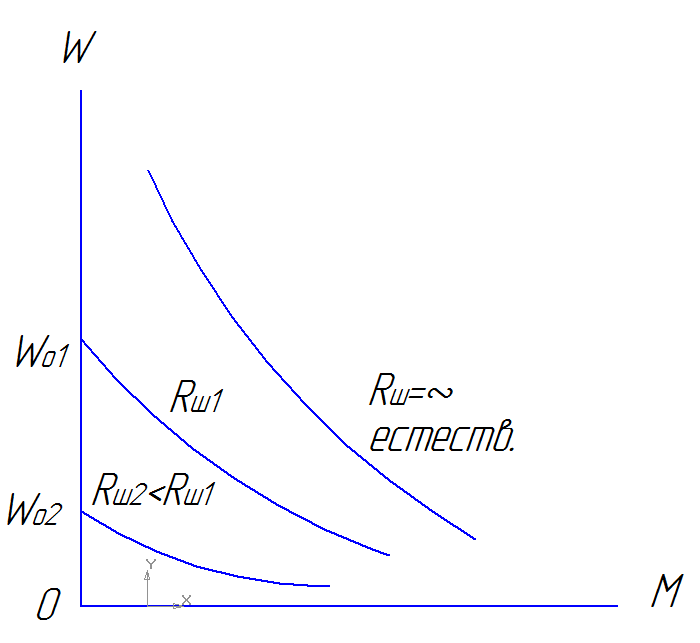
Двигатель смешенного возбуждения механические характеристики.
| <== предыдущая страница | | | следующая страница ==> |
| Особенности характеристик асинхронных двигателей с короткозамкнутым ротором | | | Л4 Механика электропривода |
Дата добавления: 2014-05-03; просмотров: 2336; Нарушение авторских прав

Мы поможем в написании ваших работ!