Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ОПРЕДЕЛЕНИЕ КРИТЕРИЕВ И СПОСОБЫ ИХ ОЦЕНКИ СУДНА
Подруливающим устройством называется средство активного управления судном. В отличие от рулевого устройства, работа подруливающего устройства обеспечивается за счет подвода дополнительной энергии гребного винта, расположенного перпендикулярно диаметральной плоскости судна, либо любого другого устройства, способного генерировать боковую силу на корпуса (крыльчатые движители, поворотные колонки и др).
6.1. ПОДРУЛИВАЮЩЕЕ УСТРОЙСТВО ТИПА «ВИНТ В ТРУБЕ»
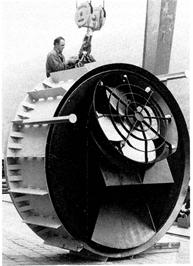
Наиболее простым и потому чаще используемым является подруливающее устройство (ПУ) типа «винт в трубе» (рис. 6.1).
|
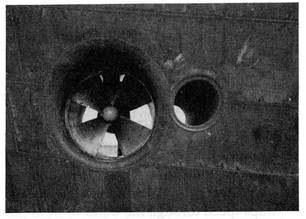
Рис. 6.1. Носовое подруливающее устройство типа «Винт в трубе».
Подруливающие устройство (одно или несколько) обычно располагаются в оконечностях судна в зависимости от величины упора, который должен быть обеспечен на данном судне для решения поставленной ему задачи. В качестве примера на рис. 6.2. приведен чертеж общего расположения сухогрузного судна с двумя носовыми и одним кормовым подруливающими устройствами.
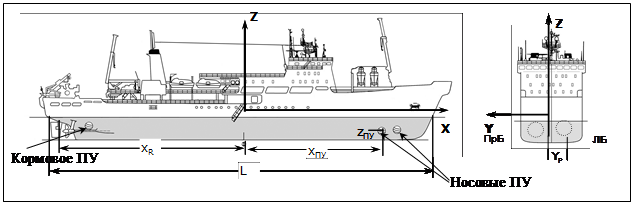 |
Рис. 6.2. Пример расположения подруливающих устройств.
Расположение подруливающих устройств в оконечностях объясняется необходимостью создания максимального разворачивающего момента, прямо связанного с расстоянием от оси ПУ до миделя.
В зависимости от места расположения ПУ и формы обводов корпуса труба, компоновка устройства будет изменяться. Рассмотрим возможные варианты.
Вариант 1. Винт расположен между двумя параллельными входным и выходным сечениями (рис. 6.3).
|
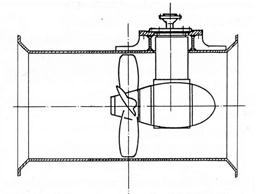
Рис. 6.3. . Винт между двумя параллельными стенками (вид с носа).
Если позволяют обводы корпуса, гребной винт располагается в трубе, входное и выходное сечение которой параллельны. Диск гребного винта располагается в диаметральной плоскости, а привод смещен в сторону правого борта. Длина трубы не должна превышать 2 – 3 х диаметров гребного винта.
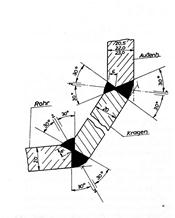
Вариант 2. Винт расположен в трубе с наклонными входным и выходным сечениями.
Труба ПУ, имеющая наклонные входное и выходное сечения, появляется в том случае, если подруливающее устройство смешено в область V – образных носовых шпангоутов (рис. 6.4а).
|
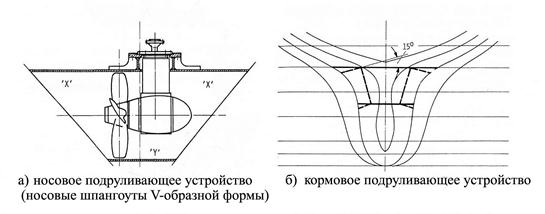
Рис. 6.4. . Винт между наклонными стенками.
Вариант 3. Винт расположен в трубе со сложной формой входного и выходного сечений.
Труба ПУ имеет входное и выходное сечения сложной формы, если ПУ расположено в кормовой оконечности судна, где проходит линия гребного вала. В качестве иллюстрации на рис. рис. 6.4б приведена схема расположения кормового ПУ.
Размеры и форма трубы определяет сопротивление трения потока, протекающего через нее, и, как следствие величину потерь мощности двигателя, вращающего винт.
|

 а) труба с параллельными сечениями б) труба с наклонными сечениями
а) труба с параллельными сечениями б) труба с наклонными сечениями
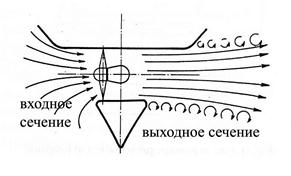
Рис. 6.5. Структура потока в трубе ПУ.
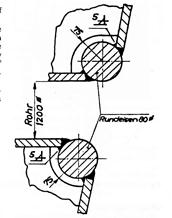
С целью уменьшения потерь особое внимание при проектировании уделяется формированию хорошо обтекаемых входного и выходного сечений трубы ПУ. На рис. 6.6 приведены эскизы оформления кромок.
|
Общим свойством всех подруливающих устройств является снижение эффективности его работы с увеличением скорости хода судна.
Рис. 6.6 Эскизы оформления кромок.
Поток воды через трубу ПУ, может нести с собой битый лед, щепки, куски дерева и др. Для избежания повреждений лопастей гребного винта и забивания входного сечения мусором, используют защитные решетки.
|
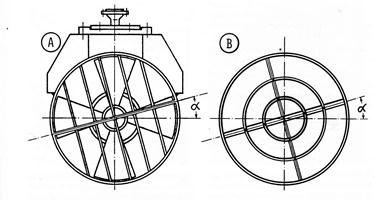
Рис. 6.7. Варианты защитных решеток.
Описанные выше картины течения внутри трубы и на входе и выходе относится к случаю неподвижного судна. При наличии хода стороне, соответствующей выходу потока из трубы появляется область пониженного давления, тем большая, чем больше скорость движения. Картина распределения давления по поверхности корпуса для четырех значений скорости хода приведена на рис. 6.8.
|
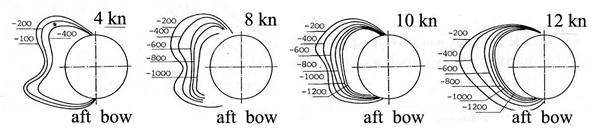
Рис. 6.8. Распределение давления по поверхности корпуса для четырех значений скорости хода
Разрежение приводи к возникновению боковой силы на корпусе, действующей в сторону, противоположную направлению тяги гребного винта. Таким образом, эффективность ПУ с ростом скорости хода снижается.
В то же время, боковая сила на руле с ростом скорости хода увеличивается. Таким образом, наиболее эффективно управление судна на средних скоростях, когда оба управляющих воздействия достаточно велики (Рис. 6.9).
|
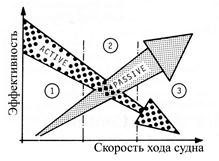
Рис. 6.9. Сравнительная эффективность средств управления судном при различном значении скорости хода.
В случае расположения рядом двух подруливающих устройств, на корпусе возникает сложная картина обтекания, влияющая на величину суммарной силы подруливающих устройств. Распределение давления по корпусу и картина линий тока приведены на рис. 6.10.
|
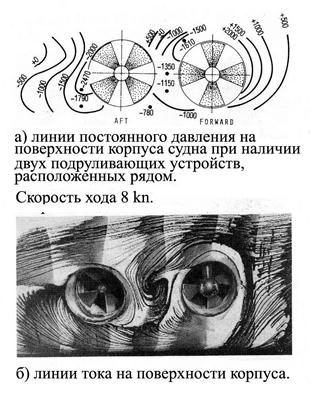
Рис. 6.10. Распределение давления и картина линий тока на корпусе модели.
6.2. ДРУГИЕ ТИПЫ ПОДРУЛИВАЮЩИХ УСТРОЙСТВ
Принцип работы аксиального подруливающего устройства основан на ускорении скорости потока в струе с помощью эжекции. Конструкция устройства, объясняющая принцип действия приведена на рис. 6.11.
|

Рис. 6.11. Устройство для увеличения скорости потока в струе водомета.
На основе этого принципа было создано подруливающее устройство с вертикальной осью (рис.6.12).
|

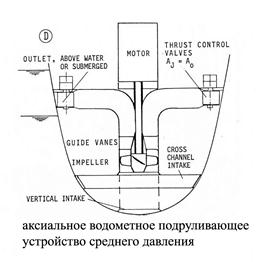
Водозаборники такого устройства располагаются в днище судна и со стороны бортов. Вода, ускоренная винтом и разностью давлений по глубине поднимается вверх и разворачивается в поворотном колене в сторону нужного борта, создавая упор.
|

5.2. Математическое описание движения судна в поле ветра.
Рассмотрим силы и моменты, действующие на судно, маневрирующее при ветре.
Особенностью задачи является существование силы, зависящей от внешних условий. Поле ветра, внутри которого перемещается судно, задается в системе координат, связанных с Землей. Будем считать это поле постоянным по величине и направлению в процессе всего рассматриваемого периода.
В процессе маневрирования судно будет менять свое положение относительно направления ветра. Следовательно, будет изменяться и угол между диаметральной плоскостью судна и вектором скорости.
Составляющие аэродинамической силы и аэродинамический момент, возникающие на надводной части корпуса судна, определяется формулами
- продольная составляющая  ;
;
- боковая составляющая  ;
;
- аэродинамический момент рыскания  ,
,
- - аэродинамический момент крена  ,
,
где  ,
,  ,
,  ,
,  - безразмерные продольная и боковая составляющие аэродинамической силы, аэродинамический момент рыскания, аэродинамический момент крена,
- безразмерные продольная и боковая составляющие аэродинамической силы, аэродинамический момент рыскания, аэродинамический момент крена,  - плотность воздуха,
- плотность воздуха,  скорость ветра, натекающего судно,
скорость ветра, натекающего судно,  площадь надводной части корпуса, в проекции на плоскость миделя,
площадь надводной части корпуса, в проекции на плоскость миделя,  площадь надводной части корпуса, в проекции на диаметральную плоскость, L – длина судна.
площадь надводной части корпуса, в проекции на диаметральную плоскость, L – длина судна.
Аэродинамические характеристики , , , определяются экспериментально в зависимости от угла набегающего потока. В случае судна, движущегося в поле ветра, скорость ветра и угол набегающего ветра будут зависеть не только от скорости ветра, определенной в неподвижной системе координат, но и от скорости хода судна. Указанные выше величины получили название «скорость кажущегося ветра» и «угол кажущегося ветра».
Список задач, определяющих параметры движения судна при ветре, включает
1. Расчет параметров движения судна с работающим гребным винтом и не переложенным рулем.
2. Расчет скорости ветрового дрейфа судна при не работающем гребном винте и не переложенном руле.
3. Расчет скорости ветрового дрейфа судна при работе носового подруливающего устройства.
Методики расчета приведены ниже.
Задача о движении судна с не переложенным рулем решается в динамической постановке по уравнениям (5.4) - (5.6). Как показывают расчеты, поведение судна при ветре зависит от устойчивости прямолинейного движения судна на тихой глубокой воде. (см. рис. 5.3)
На рисунке показаны расчетные значения траектории перемещения при ветре двух судов, одно из которых обладало устойчивостью прямолинейного движения в условиях тихой глубокой воды, а другое – нет.
В начале маневра судно с рулем в диаметральной плоскости располагается под углом к набегающему ветру. Через некоторое время разворачивается навстречу ветру и продолжает движение с некоторым углом дрейфа. Движение становится установившимся. Параметры установившегося движения можно оценить приближенно по методике [].
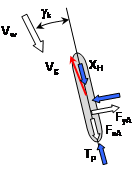 |
Рис. 5.4. Схема сил, действующих на судно при работающем движителе.
При расчетах в качестве параметра принят угол кажущегося ветра. Искомыми величинами являются угол дрейфа, скорость кажущегося ветра и угол перекладки руля.
В установившемся движении силы и моменты, действующие на корпус судна, должны быть равны. Уравнения равновесия примут вид

 ,
,
 ,
,
где b - угол дрейфа судна,  - относительная скорость ветра, рассчитываемая по формуле
- относительная скорость ветра, рассчитываемая по формуле  ,
,  - тяга гребного винта,
- тяга гребного винта,  - угол перекладки руля.
- угол перекладки руля.
Обеспечение установившегося движения судна, не обладающего устойчивостью прямолинейного движения невозможно.
5.3.2. Расчет скорости свободного ветрового дрейфа судна
Задача о свободном ветровом дрейфе судна предполагает оценку параметров движения судна при ветре с выключенными гребными винтами. В такую ситуацию может попасть во время шторма судно терпящее аварию.
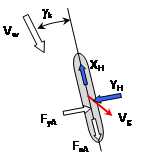 |
Рис. 5.5. Схема сил, действующих на судно при свободном дрейфе.
Рассмотрим силы, действующие на корпус дрейфующего судна. Движущей силой являются аэродинамические силы, величина и направление которых зависит от формы надводной части корпуса. Под действием ветра судно начинает перемещаться, в результате чего на подводной части корпуса возникает гидродинамическая сила, направленная в сторону противоположную движению.
В установившемся движении силы и моменты, действующие на корпус судна, должны быть равны. Уравнения равновесия примут вид
 ,
,
 ,
,
где b - угол дрейфа судна, - относительная скорость ветра, рассчитываемая по формуле .
Искомыми величинами являются угол дрейфа судна и относительная скорость . Угол кажущегося ветра принимается в качестве параметра. В качестве примера были рассчитаны значения угла и скорости ветрового дрейфа трех судов с разными вариантами надводной части корпуса. Силуэт надводной части корпуса и главные размерения приведены в таблице 5.1.
Таблица 5.1. Таблица главных размерений судов,
| Судно 1 | Судно 2 | Судно 3 |

| 
| 
|
| Судно 1. Паром | Судно 2. контейнеровоз | Судно 3. Танкер (в грузу) |
| L = 139.6 B = 17.35 T = 7.0 Hb=5.9 Ax =325.33 Ay =2125.75 | L = 187.3 B = 32.20 T = 7.0 Hb=12.2 Ax =826.3 Ay =3689.7 | L = 336 B = 55.4 T = 22 Hb=23.5 Ax =1131.79 Ay =3401.7 |
| L/B = 8.0 Ay/LT = 2.2 | L/B = 5.8 Ay/LT = 2.8 | L/B = 6.1 Ay/LT = 0.46 |
В таблице приняты следующие обозначения: L – длина судна между перпендикулярами, B – ширина судна, T – осадка судна, Hb - высота надводного борта, Ay - площадь парусности в проекции на ДП, Ax - площадь парусности в проекции на мидель.
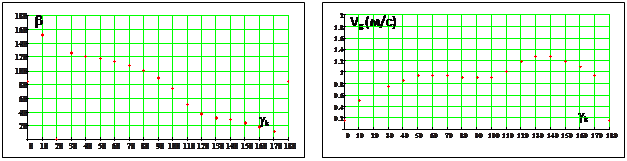 |
Рис. 5.6. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 1.
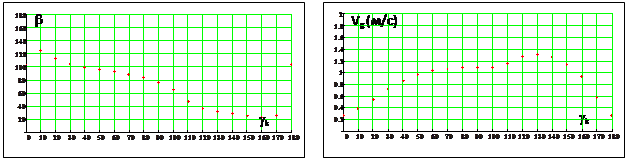 |
Рис. 5.7. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 2.
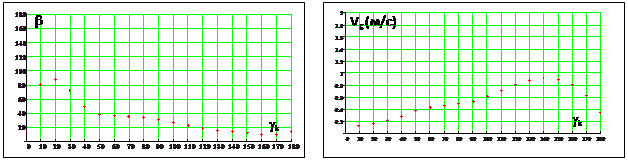 |
Рис. 5.8. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 3.
ОПРЕДЕЛЕНИЕ КРИТЕРИЕВ И СПОСОБЫ ИХ ОЦЕНКИ СУДНА
7.2.1. Цели и методы оценки маневренных качеств судна
7.2.1.1 Целью разработки стандартов является предотвращение постройки судов с плохими маневренными качествами.
7.2.1.2 Оценка маневренности может выполняться в процессе обычных испытаний. Допускаются два типа испытаний по оценке маневренности
- модельный эксперимент или расчет, которые должны быть проверены на натурном судне, если Администрация посчитает некорректной методику расчета или результат покажет существенное расхождение с требованиями рассматриваемых Норм.
- натурный эксперимент; если результаты натурного эксперимента будут свидетельствовать о плохой управляемости, судна, то Администрация в праве потребовать ее исправления.
7.2.2. Объекты, предназначенные для обследования.
7.2.2.1. Стандарт распространяется на все суда длиной более 100 м, а также для танкеров, химовозов и газовозов независимо от их длины, построенных на 1 июля 1994 г и после этой даты.
7.2.2.2. Стандарт распространяется на все суда после ремонта, изменения или модернизации, если это, по мнению Администрации, эти изменения могут повлиять на маневренные качества.
7.2.2.3. Если суда, первоначально не попадавшие под действие настоящих стандартов, будут подвергнуты ремонту, изменениям или модернизации в таком объеме, что по окончании работ судно, по мнению Администрации, можно рассматривать как новое, то эти суда должны удовлетворять настоящим стандартам. Или в том случае, если по мнению Администрации, переделка судна может привести к изменению маневренных качеств. В последнем случае Администрация вправе потребовать доказательств, что указанные переделки не приведут к ухудшению маневренности.
7.2.2.4. Данные не распространяются на быстроходные суда.
7.2.3. Использованные определения.
7.2.3.1. Геометрия судна.
.1 Длина (L) есть расстояние, измеренное между носовым и кормовым перпендикулярами.
.2 Средняя точка – точка на диаметральной плоскости посередине между носовым и кормовым перпендикулярами.
.3 Осадка (Ta) осадка на кормовом перпендикуляре.
.4 Осадка (Tf) осадка на носовом перпендикуляре.
.5 Средняя осадка (Tm), осадка, которая определяется как 
7.2.3.2. Стандартные маневры и относящаяся к ним терминология.
Стандартные маневры и относящаяся к ним терминология определяются следующим образом
.1 Скорость судна на испытаниях (V) есть скорость, равная 90% скорости хода судна при 85% от максимальной мощности, развиваемой СЭУ.
.2 Маневр «циркуляция» выполняется как вправо, так и влево, при углах перекладки руля на 35о или на максимальный угол, допускаемый на данной скорости хода при нулевой скорости рыскания.
.3 Выдвиг есть дистанция, проходимая средней точкой судна в направлении первоначального курса, от положения, в котором была отдана команда на перекладку руля, до положения, когда курс судна изменится на 90о относительно исходного положения.
.4 Тактический диаметр есть дистанция, проходимая средней точкой судна в направлении первоначального курса, от положения, в котором была отдана команда на перекладку руля, до положения, когда курс судна изменится на 180о относительно исходного положения. Тактический диаметр измеряется в направлении перпендикулярном начальному направлению движения.
.5 Маневр «Зигзаг» является маневром, при выполнении которого заданная величина перекладки руля поочередно меняется поочередно на каждый борт при отклонении курса от первоначального направления на заданный угол.
.6 Маневр «Зигзаг 10/10» является маневром, при выполнении которого угол перекладки руля меняется поочередно на каждый борт при отклонении курса от первоначального направления на угол 10о в соответствии со следующими процедурами
.1. На судне, движущемся с нулевой скоростью рыскания, руль перекладывается на правый / левый борт на 10о (первое действие).
.2. В момент изменения курса на 10о относительно первоначального положения руль перекладывается на 10о в сторону противоположного борта (второе действие, одерживание поворота).
.3. После перекладки руля судно продолжает вращение в исходном направлении с уменьшающейся угловой скоростью, останавливается и начинает вращаться в сторону переложенного руля; по достижении угла курса 10о руль вновь перекладывается на противоположный борт (третье действие);
.7. Первый угол зарыскивания (угол заброса) – разность между углом курса, измеренным в момент прекращения вращения и углом перекладки руля после второго действия.
.8. Второй угол зарыскивания – разность между углом курса, измеренным в момент прекращения вращения и углом перекладки руля после третьего действия
.9 Маневр «Зигзаг 20/20» является маневром, при выполнении которого угол перекладки руля меняется поочередно на каждый борт при отклонении курса от первоначального направления на угол 20о в соответствии с процедурами, описанными в п.6.
.10 Маневр «Аварийная остановка» выполняется с помощью реверса гребного винта с полного переднего хода на полный задний ход. При выполнении маневра определяется длина пути, пройденного средней точкой судна с момента отдачи команды на полный задний ход до момента остановки судна.
.11 Тормозной путь – расстояние вдоль траектории перемещения средней точки судна с момента отдачи команды на полный задний ход до момента остановки судна относительно воды.
7.2. 4. Описание условий выполнения маневров.
7.2.4.1. Измерение параметров движения судна должно выполняться только на штатном оборудовании.
7.2.4.2. Условия проведения измерений параметров движения.
Испытания должны проводиться при следующих условиях
- глубокая вода, нестесненная акватория;
- отсутствие ветра и волнения;
- загрузка судна, соответствующая посадке в грузу на ровный киль;
- в начале движения судно должно двигаться с постоянной скоростью при нулевом значении угловой скорости.
7.2.5. Критерии, определяющие маневренность судна.
Маневренные качества судна считаются удовлетворительными, если они удовлетворяют следующим критериям
- поворотливость - поворотливость судна определяется величиной выдвига и тактического диаметра. Выдвиг судна не должен превышать 4.5 длин корпуса, а тактический диаметр не должен превышать 5.0 длин корпуса.
- начальная поворотливость – начальная поворотливость определяется длиной пути, пройденного судном с момента подачи команды на перекладку руля до момента изменения курса на 10о; длина пути не должна превышать 2.5 длин корпуса.
- рыскливость – рыскливость судна определяется по величине углов зарыскивания при выполнении маневров «зигзаг 10/10» и «зигзаг 20/20». При выполнении маневра «зигзаг 10/10» величина первого заброса не должна превышать
- 10о – при значениях L/V меньших 10 секунд;
- 20о – при значениях L/V 30 секунд и более;
-  при значениях L/V от 10 секунд до 30 секунд.
при значениях L/V от 10 секунд до 30 секунд.
Графически, это можно представить так, как показано на рис. 7.1.
 |
Рис. 7.1 Допустимые значения углов первого заброса
при выполнении маневра «зигзаг 10/10».
Величина второго заброса при выполнении маневра «зигзаг 10/10» не должна превышать соответствующую величину при первом забросе на 15о.
Величина первого заброса при выполнении маневра «зигзаг 20/20» не должна превышать 25о.
- тормозные характеристики; тормозные характеристики судна определяются по расстоянию, пройденному судном с момента отдачи команды на полный задний ход до момента остановки судна относительно воды. Длина тормозного пути не должна превышать 15 длин корпуса. Предельно допускаемая длина тормозного пути может быть изменена Администрацией, в случае, если ее уменьшение не возможно по объективным причинам.
| <== предыдущая страница | | | следующая страница ==> |
| УПРАВЛЯЕМОСТЬ СУДНА ПРИ РАБОТЕ ПОДРУЛИВАЮЩЕГО УСТРОЙСТВА | | | НАТУРНЫЕ ИСПЫТАНИЯ СУДОВ И СПОСОБЫ ПРЕДСТАВЛЕНИЯ РЕЗУЛЬТАТОВ |
Дата добавления: 2014-07-11; просмотров: 866; Нарушение авторских прав

Мы поможем в написании ваших работ!