Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
УПРАВЛЯЕМОСТЬ СУДНА ПРИ РАБОТЕ ПОДРУЛИВАЮЩЕГО УСТРОЙСТВА
Работы по оценке состояния дорог проводят в такой последовательности:
изучение проектной и технической документаций, визуальный осмотр и обследования, детальные инструментальные обследования и испытания.
При текущих ежегодных осмотрах и обследованиях визуально определяют вид и число дефектов дорожной одежды, земляного полотна, обочин, откосов и водоотвода, оценивают полноту, состояние и правильность размещения инженерного оборудования, обстановки и обустройства дорог, проводят инструментальную оценку ровности и сцепных качеств покрытия, составляют сезонные графики коэффициентов аварийности.
По результатам визуальных осмотров назначают мероприятия по содержанию, определяют участки для детального обследования. Их выполняют на участках имеющих неровности, трещины и разрушения покрытий, деформации земляного полотна и др. дефекты. Инструментальные измерения, испытания проводят с целью получить количественные данные о состоянии дорог, уточнить причины образования деформаций и разрушений, назначить виды ремонтных работ и их объемы.
Детальные обследования включают определение параметров геометрических элементов, полевые испытания дорожных одежд методами статического и кратковременного нагружения, вскрытия дорожной одежды
(при необходимости) и определения физико-механических свойств материалов ее конструктивных слоев, грунтов земляного полотна под проезжей частью, оценку состояния обочин и откосов. Все работы выполняют в расчетный (как правило, в весенний) неблагоприятный по условиям увлажнения период года. Для объективной и глубокой оценки состояния дорог создают диагоностические станции, оснащенные передвижными лабораториями и оборудованием для проведения всего комплекса испытаний и измерений по всем транспортно-эксплуатационным показателям.
Для определения параметров геометрических элементов применяют геодезические приборы и инструменты, передвижные лаборатории, аэрофотосъемку и наземную стереофотограмметрическую съемку. Из простейших приспособлений для определения уклонов обочин и откосов земляного полотна, а также продольных и поперечных уклонов покрытий используют угломерную линейку типа КП-135 и др. приборы.Создана несколько образцов передвижных дорожных лабораторий паспортизации дорог, оснащенных приборами для измерения геометрических параметров. Наибольшее применение получил разработанный Саратовским филиалом Гипродорнии прибор “Трасса-1” и его модификации “Трасса –2 ”, которые входят в состав передвижной лаборатории.
На базе прибора КП-208 Саратовским филиалом Гипродорнии создана также информационно-измерительная система “Трасса”, которая обеспечивает автоматизацию измерений не только параметров плана и профиля дороги, но и измерения ровности и коэффициента сцепления. Она является основной частью автоматизированной ситемы технической паспортизации дорог (АСТП АД).
Прибор КП-208 предназначен для измерения движения и записи на диаграммную ленту углов поворота, продольных и поперечных уклонов, длины прямых и кривых.
При систематичеких осмотрах элементов обустройства, знаков, ограждений проверяют наличие этих элементов, соответствие их расстановки схеме дислокации, выявляют повреждения, дефекты, которые могут быть устранены на месте без применения машин и сложного оборудования, а также
необходимость их очистки от пыли, грязи и т.д. При оценке разметки проверяют наличие и степень ее износа, соответствие схемы реальным условиям движения. При оценке состояния элементов благоустройства автомобильных дорог (остановки, автоповильоны, площадки отдыха, видовые площадки, стоянки автомобилей) выявляют поломки элементов оборудования и др. дефекты.
Для оценки прочности дорожных одежд проводят полевые испытания, как правило, в расчетный неблагоприятный по условиям увлажнения период года.
Методы измерения прочности одежд можно классифицировать: по условиям передачи нагрузок на одежду через измеряемое устройство - статические и динамические; по условиям измерения прочности - дескретные с записью прогиба в одной точке и непрерывные с записью прогибов при движении в автоматическом режиме через некоторое расстояние, например 3-6 метров.
К статическим относят метод штамповых испытаний и методы испытаний колесом автомобиля, к динамическим – методы испытаний падающими, ударными или вибрационными нагрузками.
Из прогибомеров большее распространение получил длиннобазовый прогибомер длиной 3,75 м, разработанный в Гипродорнии. Этот прогибомер под маркой КП-204 серийно выпускают заводы России. Прогиб покрытия измеряют на полосе наката проезжей части по центру между скатами сдвоенного колеса автомобиля. В каждом месте выполняют 2-3 измерения через 5-10 метров.
Имеются установки, позволяющие измерять упругий статический прогиб с большой производительностью. Например, специальные подвесные прогибомеры применены на передвижной лаборатории Лакруа (Франция). Лаборатория движется со скоростью 2-3,5 км/час и измеряет прогибы под каждым колесом задней оси автомобиля.
2. Параметры дорог определяют инструментально при детальных обследованиях. Данные измерений заносят в паспорт дороги и корректируют после каждого ремонта, а также после реконструкции дороги или ее участка.
Ширина проезжей части, краевых укрепленных полос и обочин измеряют на каждом характерном участке (на прямых, кривых в плане и профиле, в местах сужений или изменения ширины, над водопропускными трубами, на мостах, путепроводах, на высоких насыпях, в местах установки ограждений), но не реже, чем одно измерение на километр.
Для определения параметров геометрических элементов применяют геодезические инструменты, передвижные лаборатории, аэрофотосъемку, наземную стереофотограмметрическую съемку. Из простейших приспособлений для определения уклонов обочин и откосов земляного полотна, продольных и поперечных уклонов покрытий используют угломерную линейку КП 135.
Длину участков и ширину элементов дороги в плане определяют также с помощью курвиметра типа КП203, который представляет собой колесо, окружностью 1 м, установленное на вилке с ручкой и соединенное зубчатой передачей со счетчиком. Измерение расстояний геометрической видимости поверхности дороги выполняют с помощью дорожного дальномера типа КП213, устанавливаемого в автомобиле. Видимость также может быть измерена мерной лентой. Создано также несколько образцов передвижных лабораторий, оснащенных приборами для измерения геометрических параметров дорог. Передвижные лаборатории оснащены приборами для измерения в движении и записи на диаграммную ленту углов поворота, продольных и поперечных уклонов, длины прямых вставок и длины горизонтальных кривых.
Обработка записей позволяет определять радиусы кривых в плане и параметры переходных кривых, радиуса выпуклых и вогнутых, вертикальных кривых, видимость в продольном профиле и высотные отметки.
Измерения проводят в прямом и в обратном направлениях (для контроля). Участок измерения составляет, как правило, 10-20 км. В процессе измерений регистрируют начало и конец каждого участка, характерные точки на дороге (км столбики, мосты, водопропускные трубы, съезды с автодороги, переезды, линии связи и электропередачи и др.).
Широкое распространение получил метод киносъемки, позволяющий получить информацию о состоянии покрытия, инженерном обустройстве дороги, выявить места с необеспеченной видимостью. Кинокамеру устанавливают в передвижной лаборатории под определенным углом к покрытию и в процессе движения производят покадровую съемку поверхности дороги, одновременно в кадр вводится информация о скорости движения, о пройденном пути.
3. При оценки земляного полотна и системы водоотвода выполняют визуальный осмотр и инструментальное обследование характеристик грунта, необходимое для выяснения причин деформаций и разрушений, разработки мероприятий по их устранению.
Визуальная оценка состояния обочин включает в себя:
а) проверку наличия колей и ям, мест застоя воды, промоин, оползней грунта на прибровочной полосе, перекоса грунта с обочин на проезжую часть, просадок или вспученных мест, наличие деформаций и разрушений поверхности слоев укрепления, целостность травяного покрова;
б) на укреплениях: проверку наличия просадок, разрушения укреплений, особенно в местах стыковки с проезжей частью и у прибровочной полосы, промоин, разрушений на прибровочной полосе, сохранность поперечных уклонов.
Вид деформаций, протяженность участков с отмеченными деформациями и их объем заносят в ведомость дефектов. Дают рекомендации о местах проведения инструментальных обследований.
Визуальная оценка состояния откосов включает:
а) для укрепленных травосеянием: объем и характер разрушений травяного покрова, наличие и объем оплывов и сплывов грунта, промоин, участков с оползневыми явлениями, обрушений грунта, выноса грунта из откоса;
б) для укрепленных различными материалами и конструкциями: состояние конструкций укрепления, объем и вид деформаций и разрушений, определение эффективности используемого укрепления в данных грунтовых, гидрологических и климатических условиях.
Визуальная оценка водоотводных сооружений включает оценку целостности устройства, сохранности заданных геометрических форм, конструкции укрепления, стоковой способности. При этом выявляют места застоя воды, заиливания, засорения или зарастания боковых канав травой и кустарником, места оползания откосов или их размывы, отсутствие необходимых водоотводных сооружений.
При осмотре дренажных устройство отмечают места засорения устьев оплывшим по откосу грунтом, выбоины и трещины в дренах, засорение полости дрен, оседание отдельных звеньев, засорение отстойников, разрушение вокруг них грунтовой обсыпки. Результаты визуальной оценки заносят в ведомость дефектов.
При инструментальной оценке определяют характеристики грунта (модуль упругости, сопротивление сдвигу, угол внутреннего трения, сцепление, коэффициент фильтрации, влажность, плотность, гранулометричный состав). По результатам устанавливают причины разрушения и назначают мероприятия по восстановлению таких участков.
4. Оценка состояния элементов обустройства проводят систематически и посезонно.
Проверяют наличие элементов обустройства: дорожных знаков, ограждений, соответствие их расстановки, выявляют повреждения, дефекты, необходимость их очистки от пыли и грязи.
При оценке разметки проверяют наличие и степень ее износа, соответствие схемы реальным условиям движения.
5. Оценка прочности дорожных одежд. Для оценки прочности дорожных одежд проводят полевые испытания. К полевым относят испытания линейные и на контрольных точках.
На каждом характерном участке, имеющем одинаковое состояние покрытия по видам дефектов, конструкцию дорожной одежды, грунт земляного полотка, тип местности по условиям увлажнения, интенсивность движения, назначают одну контрольную точку, на которой испытание назначали раньше, чем линейные.
Испытания на контрольных точках осуществляют ежедневно, чтобы выявить закономерности изменения фактического модуля упругости дорожной конструкции Еф в расчетный период (т.е. самый неблагоприятный период) и привести результаты линейных испытаний, выполненных в различные дни.
Линейные испытания ведут равномерно вдоль обследуемой дороги по внешней полосе наката (1-1,5 м от кромки покрытия) по наиболее нагруженной полосе движения. Их начинают, когда по результатам испытаний на контрольных токах станет видна общая картина увеличения прогиба покрытия (Ly).
Для дорожных одежд нежесткого типа, рассчитанных на работу в стадии упругих деформаций, методы оценки прочности основаны на измерении упругого прогиба. Модуль упругости дорожной одежды Еобщ. определяется по формуле:
где Р-удельное давление колеса автомобиля на
покрытие, (МПа);
m- коэффициент Пуассона;
lу- относительная упругая деформация;
Д- диаметр следа колеса;
Lу-полная упругая деформация.
Методы измерения прочности одежд можно классифицировать:
1) по условиям передачи нагрузок на одежду через измеряемое устройство, т.е. статические и динамические;
2) по условиям измерения прочности, т.е. при движении происходит непрерывная запись прогибов через некоторое расстояние, примерно через 3-6 м.
Статистические испытания проводят редко, ввиду их малой производительности.
Большее распространение получили динамические испытания. Для этого применяют прибор длиннобазовый прогибомер, устанавливаемый на автомобилях марки МАЗ. При помощи прогибомера измеряют прогиб дорожной одежды.
Lу = 2(i – iо), мм,
Где iо -отсчет по индикатору в начале измерения,
i - отсчет после отъезда автомобиля с контрольной точки измерения.
Получив значение упругого прогиба (Lу), определяют фактический модуль упругости дорожной одежды (Еф).
Имеются установки, которые позволяют определять упругий прогиб существующей дорожной одежды с большой производительностью. Специальные подвесные прогибомеры применяют на передвижных лабораториях. Лаборатория движется со скоростью 2-3,5 км/ч и измеряет прогибы под каждым колесом задней оси автомобиля.
6. Для оценки ровности и сцепных качеств покрытия применяют сплошной или выборочный контроль.
Сплошной контроль выполняют с применением высокопро-изводительных передвижных лабораторий для обследования участков большой протяженности (> 1 км) при приемке построенных дорог в эксплуатацию, перед ремонтом и после выполнения каждого ремонта.
Выборочный контроль применяют при оценки ровности и сцеп. качеств покрытия на коротких участках дороги, на которых в процессе визуального осмотра установлено наличие неровностей и скользкости покрытия.
Применяют как передвижные лаборатории, так и портативные приборы.
В мировой практике известно более 50 конструкций приборов для измерения ровности покрытия. По принципу действия различают приборы:
1) регистрирующие геометрические параметры неровностей: рейки, уклономеры, нивелиры и др.;
2) импульсного действия, измеряющие колебания или перемещения отдельных элементов автомобиля: различные толчкомеры.
У нас наибольшее распространение получил метод непосредственных дискретных измерений микропрофиля с помощью 3-метровой рейки с клином. Его применяют для контроля ровности при строительстве и для выборочного контроля ровности при эксплуатации дорог.
Для повышения производительности вместо переносных применяют передвижные рейки.
Из приборов импульсного действия широкое распространение получил толчкомер. Одной из модификаций является разработка КаздорНИИ ТКХ-2.
Основными показателями для оценки ровности покрытия дорожной одежды служат:
1) размер и число просветов (мм) под 3-метровой рейкой, прикладываемой к покрытию в продольном направлении на расстоянии 0,75-1 м от кромки покрытия;
2) сумма сжатия рессор автомобиля или прицепа (в см на
1 км) при движении со скоростью 50 км/ч.
На эксплуатируемых дорогах подавляющая часть просветов под 3-метровой рейкой не должна превышать:
усовершенстванно капитальные покрытия (УК) - 5 мм
усовершенстванно облегченные (УО) - 7 мм
переходные - 15 мм
Число просветов, превышающие эксплуатационные значения:
| Тип дорожн. | Число просветов при ин-ти движения, авт/сутки | |||||
| одежды | 500-1000 | 1000-3000 | 3000-5000 | 5000-7000 | более 7000 | |
| УК | - | 12-7 | 7-6 | |||
| УО | - | 10-6 | - | - | - | |
| П | - | - | - | - | - |
При этом максимальный просвет под рейкой не должен превышать для:
УК - 10 мм
УО - 14 мм
П - 30 мм
Допустимые показатели ровности при измерении толчкомером:
| Тип | Ровность см/км при инт-ти движения, авт/сутки | |||||
| покрытия | 500-1000 | 1000-3000 | 3000-5000 | 5000-7000 | Более 7000 | |
| УК | - | 230-150 | 150-130 | |||
| УО | - | 300-200 | - | - | - | |
| П | - | - | - | - | - | - |
Коэффициент ровности – основной эксплуатационный показатель.
Кр = Sн / Sф
Sн – предельно допустимая ровность;
Sф – фактическая ровность, определяемая непосредственными
измерениями на участках приборами.
Покрытие считается ровным, если Кр > 1
Для оценки сцепных качеств покрытия служит коэффициент продольного сцепления.
Для непосредственного измерения коэффициента сцепления в полевых условиях широко применяют различные динамометри-ческие тележки.
Предельно допустимые в процессе эксплуатации покрытий коэффициенты сцепления не должны быть ниже:
| Условия движения | К-т сцепл. при скорости 60 км/ч |
| Легкие | 0,28 |
| Затрудненные | 0,30 |
| Опасные | 0,32 |
Коэффициент относительного сцепления колес автомобиля с покрытием (коэффициент скользскости) – основной показатель сцепных качеств и шероховатости покрытий).
jф-фактическое значение коэффициента сцепления;
jн- допустимое значение коэффициента сцепления.
Покрытие по сцеплению соответствует требованиям, если Кс>1
Чтобы обеспечить безопасность встречных автомобилей на 2-х полосных дорогах и движущихся по смежным полосам многополостных дорог, а также при съезде автомобилей на укрепленные полосы и прикромочные зоны обочин, применяемый коэффициент сцепления в поперечном профиле дорожного полотна не должен превышать:
| Категория дороги | В пределах проезжей части | На краевых укрепл. полосах и прикромочных зонах обочин по сравнению с проезжей частью. |
| I а | 0,04-0,08 | 0,08-0,1 |
| II б, II | 0,08 | 0,10-0,15 |
| III | 0,08-0,1 | 0,15 |
| IV | 0,1 | 0,2 |
УПРАВЛЯЕМОСТЬ СУДНА ПРИ РАБОТЕ ПОДРУЛИВАЮЩЕГО УСТРОЙСТВА.
Подруливающим устройством называется средство активного управления судном. В отличие от рулевого устройства, работа подруливающего устройства обеспечивается за счет подвода дополнительной энергии гребного винта, расположенного перпендикулярно диаметральной плоскости судна, либо любого другого устройства, способного генерировать боковую силу на корпуса (крыльчатые движители, поворотные колонки и др).
6.1. ПОДРУЛИВАЮЩЕЕ УСТРОЙСТВО ТИПА «ВИНТ В ТРУБЕ»
Наиболее простым и потому чаще используемым является подруливающее устройство (ПУ) типа «винт в трубе» (рис. 6.1).
|
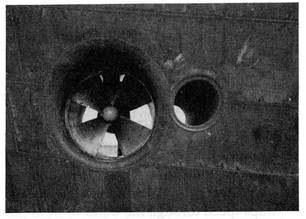
Рис. 6.1. Носовое подруливающее устройство типа «Винт в трубе».
Подруливающие устройство (одно или несколько) обычно располагаются в оконечностях судна в зависимости от величины упора, который должен быть обеспечен на данном судне для решения поставленной ему задачи. В качестве примера на рис. 6.2. приведен чертеж общего расположения сухогрузного судна с двумя носовыми и одним кормовым подруливающими устройствами.
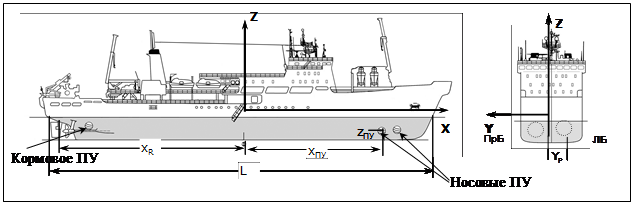 |
Рис. 6.2. Пример расположения подруливающих устройств.
Расположение подруливающих устройств в оконечностях объясняется необходимостью создания максимального разворачивающего момента, прямо связанного с расстоянием от оси ПУ до миделя.
В зависимости от места расположения ПУ и формы обводов корпуса труба, компоновка устройства будет изменяться. Рассмотрим возможные варианты.
Вариант 1. Винт расположен между двумя параллельными входным и выходным сечениями (рис. 6.3).
|
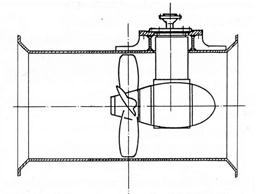
Рис. 6.3. . Винт между двумя параллельными стенками (вид с носа).
Если позволяют обводы корпуса, гребной винт располагается в трубе, входное и выходное сечение которой параллельны. Диск гребного винта располагается в диаметральной плоскости, а привод смещен в сторону правого борта. Длина трубы не должна превышать 2 – 3 х диаметров гребного винта.
Вариант 2. Винт расположен в трубе с наклонными входным и выходным сечениями.
Труба ПУ, имеющая наклонные входное и выходное сечения, появляется в том случае, если подруливающее устройство смешено в область V – образных носовых шпангоутов (рис. 6.4а).
|
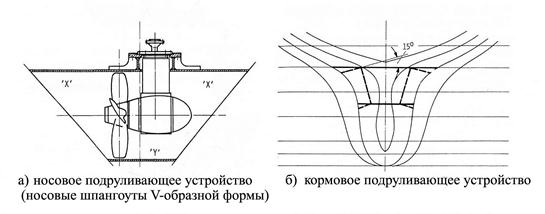
Рис. 6.4. . Винт между наклонными стенками.
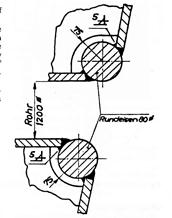
Вариант 3. Винт расположен в трубе со сложной формой входного и выходного сечений.
Труба ПУ имеет входное и выходное сечения сложной формы, если ПУ расположено в кормовой оконечности судна, где проходит линия гребного вала. В качестве иллюстрации на рис. рис. 6.4б приведена схема расположения кормового ПУ.
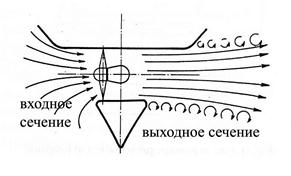
Размеры и форма трубы определяет сопротивление трения потока, протекающего через нее, и, как следствие величину потерь мощности двигателя, вращающего винт.
|

 а) труба с параллельными сечениями б) труба с наклонными сечениями
а) труба с параллельными сечениями б) труба с наклонными сечениями
Рис. 6.5. Структура потока в трубе ПУ.
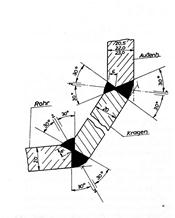
С целью уменьшения потерь особое внимание при проектировании уделяется формированию хорошо обтекаемых входного и выходного сечений трубы ПУ. На рис. 6.6 приведены эскизы оформления кромок.
|
Общим свойством всех подруливающих устройств является снижение эффективности его работы с увеличением скорости хода судна.
Рис. 6.6 Эскизы оформления кромок.
Поток воды через трубу ПУ, может нести с собой битый лед, щепки, куски дерева и др. Для избежания повреждений лопастей гребного винта и забивания входного сечения мусором, используют защитные решетки.
|
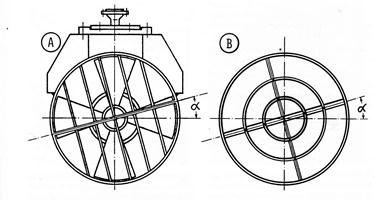
Рис. 6.7. Варианты защитных решеток.
Описанные выше картины течения внутри трубы и на входе и выходе относится к случаю неподвижного судна. При наличии хода стороне, соответствующей выходу потока из трубы появляется область пониженного давления, тем большая, чем больше скорость движения. Картина распределения давления по поверхности корпуса для четырех значений скорости хода приведена на рис. 6.8.
|
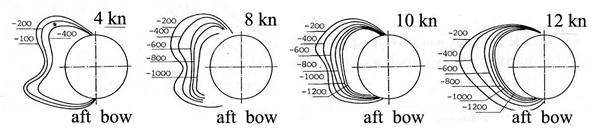
Рис. 6.8. Распределение давления по поверхности корпуса для четырех значений скорости хода
Разрежение приводи к возникновению боковой силы на корпусе, действующей в сторону, противоположную направлению тяги гребного винта. Таким образом, эффективность ПУ с ростом скорости хода снижается.
В то же время, боковая сила на руле с ростом скорости хода увеличивается. Таким образом, наиболее эффективно управление судна на средних скоростях, когда оба управляющих воздействия достаточно велики (Рис. 6.9).
|
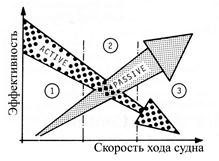
Рис. 6.9. Сравнительная эффективность средств управления судном при различном значении скорости хода.
В случае расположения рядом двух подруливающих устройств, на корпусе возникает сложная картина обтекания, влияющая на величину суммарной силы подруливающих устройств. Распределение давления по корпусу и картина линий тока приведены на рис. 6.10.
|
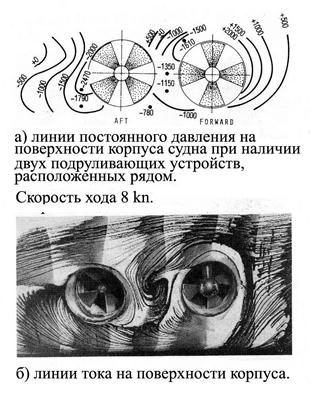
Рис. 6.10. Распределение давления и картина линий тока на корпусе модели.
6.2. ДРУГИЕ ТИПЫ ПОДРУЛИВАЮЩИХ УСТРОЙСТВ
Принцип работы аксиального подруливающего устройства основан на ускорении скорости потока в струе с помощью эжекции. Конструкция устройства, объясняющая принцип действия приведена на рис. 6.11.
|

Рис. 6.11. Устройство для увеличения скорости потока в струе водомета.
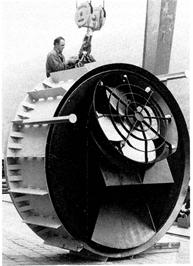
На основе этого принципа было создано подруливающее устройство с вертикальной осью (рис.6.12).
|

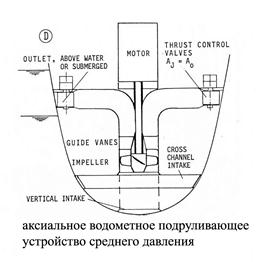
Водозаборники такого устройства располагаются в днище судна и со стороны бортов. Вода, ускоренная винтом и разностью давлений по глубине поднимается вверх и разворачивается в поворотном колене в сторону нужного борта, создавая упор.
|

5.2. Математическое описание движения судна в поле ветра.
Рассмотрим силы и моменты, действующие на судно, маневрирующее при ветре.
Особенностью задачи является существование силы, зависящей от внешних условий. Поле ветра, внутри которого перемещается судно, задается в системе координат, связанных с Землей. Будем считать это поле постоянным по величине и направлению в процессе всего рассматриваемого периода.
В процессе маневрирования судно будет менять свое положение относительно направления ветра. Следовательно, будет изменяться и угол между диаметральной плоскостью судна и вектором скорости.
Составляющие аэродинамической силы и аэродинамический момент, возникающие на надводной части корпуса судна, определяется формулами
- продольная составляющая  ;
;
- боковая составляющая  ;
;
- аэродинамический момент рыскания  ,
,
- - аэродинамический момент крена  ,
,
где  ,
,  ,
,  ,
,  - безразмерные продольная и боковая составляющие аэродинамической силы, аэродинамический момент рыскания, аэродинамический момент крена,
- безразмерные продольная и боковая составляющие аэродинамической силы, аэродинамический момент рыскания, аэродинамический момент крена,  - плотность воздуха,
- плотность воздуха,  скорость ветра, натекающего судно,
скорость ветра, натекающего судно,  площадь надводной части корпуса, в проекции на плоскость миделя,
площадь надводной части корпуса, в проекции на плоскость миделя,  площадь надводной части корпуса, в проекции на диаметральную плоскость, L – длина судна.
площадь надводной части корпуса, в проекции на диаметральную плоскость, L – длина судна.
Аэродинамические характеристики , , , определяются экспериментально в зависимости от угла набегающего потока. В случае судна, движущегося в поле ветра, скорость ветра и угол набегающего ветра будут зависеть не только от скорости ветра, определенной в неподвижной системе координат, но и от скорости хода судна. Указанные выше величины получили название «скорость кажущегося ветра» и «угол кажущегося ветра».
Список задач, определяющих параметры движения судна при ветре, включает
1. Расчет параметров движения судна с работающим гребным винтом и не переложенным рулем.
2. Расчет скорости ветрового дрейфа судна при не работающем гребном винте и не переложенном руле.
3. Расчет скорости ветрового дрейфа судна при работе носового подруливающего устройства.
Методики расчета приведены ниже.
Задача о движении судна с не переложенным рулем решается в динамической постановке по уравнениям (5.4) - (5.6). Как показывают расчеты, поведение судна при ветре зависит от устойчивости прямолинейного движения судна на тихой глубокой воде. (см. рис. 5.3)
На рисунке показаны расчетные значения траектории перемещения при ветре двух судов, одно из которых обладало устойчивостью прямолинейного движения в условиях тихой глубокой воды, а другое – нет.
В начале маневра судно с рулем в диаметральной плоскости располагается под углом к набегающему ветру. Через некоторое время разворачивается навстречу ветру и продолжает движение с некоторым углом дрейфа. Движение становится установившимся. Параметры установившегося движения можно оценить приближенно по методике [].
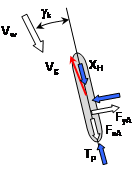 |
Рис. 5.4. Схема сил, действующих на судно при работающем движителе.
При расчетах в качестве параметра принят угол кажущегося ветра. Искомыми величинами являются угол дрейфа, скорость кажущегося ветра и угол перекладки руля.
В установившемся движении силы и моменты, действующие на корпус судна, должны быть равны. Уравнения равновесия примут вид

 ,
,
 ,
,
где b - угол дрейфа судна,  - относительная скорость ветра, рассчитываемая по формуле
- относительная скорость ветра, рассчитываемая по формуле  ,
,  - тяга гребного винта,
- тяга гребного винта,  - угол перекладки руля.
- угол перекладки руля.
Обеспечение установившегося движения судна, не обладающего устойчивостью прямолинейного движения невозможно.
5.3.2. Расчет скорости свободного ветрового дрейфа судна
Задача о свободном ветровом дрейфе судна предполагает оценку параметров движения судна при ветре с выключенными гребными винтами. В такую ситуацию может попасть во время шторма судно терпящее аварию.
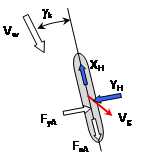 |
Рис. 5.5. Схема сил, действующих на судно при свободном дрейфе.
Рассмотрим силы, действующие на корпус дрейфующего судна. Движущей силой являются аэродинамические силы, величина и направление которых зависит от формы надводной части корпуса. Под действием ветра судно начинает перемещаться, в результате чего на подводной части корпуса возникает гидродинамическая сила, направленная в сторону противоположную движению.
В установившемся движении силы и моменты, действующие на корпус судна, должны быть равны. Уравнения равновесия примут вид
 ,
,
 ,
,
где b - угол дрейфа судна, - относительная скорость ветра, рассчитываемая по формуле .
Искомыми величинами являются угол дрейфа судна и относительная скорость . Угол кажущегося ветра принимается в качестве параметра. В качестве примера были рассчитаны значения угла и скорости ветрового дрейфа трех судов с разными вариантами надводной части корпуса. Силуэт надводной части корпуса и главные размерения приведены в таблице 5.1.
Таблица 5.1. Таблица главных размерений судов,
| Судно 1 | Судно 2 | Судно 3 |

| 
| 
|
| Судно 1. Паром | Судно 2. контейнеровоз | Судно 3. Танкер (в грузу) |
| L = 139.6 B = 17.35 T = 7.0 Hb=5.9 Ax =325.33 Ay =2125.75 | L = 187.3 B = 32.20 T = 7.0 Hb=12.2 Ax =826.3 Ay =3689.7 | L = 336 B = 55.4 T = 22 Hb=23.5 Ax =1131.79 Ay =3401.7 |
| L/B = 8.0 Ay/LT = 2.2 | L/B = 5.8 Ay/LT = 2.8 | L/B = 6.1 Ay/LT = 0.46 |
В таблице приняты следующие обозначения: L – длина судна между перпендикулярами, B – ширина судна, T – осадка судна, Hb - высота надводного борта, Ay - площадь парусности в проекции на ДП, Ax - площадь парусности в проекции на мидель.
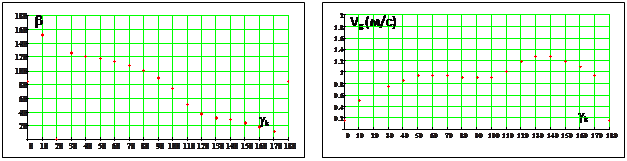 |
Рис. 5.6. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 1.
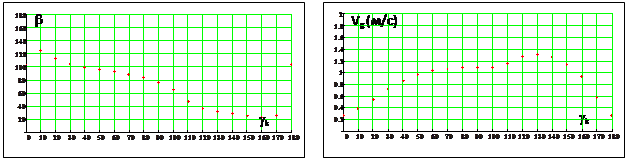 |
Рис. 5.7. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 2.
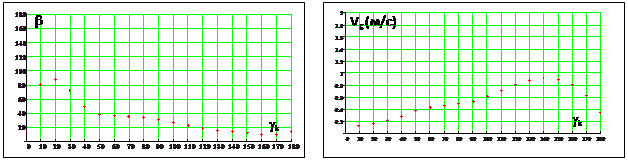 |
Рис. 5.8. Значения угла дрейфа и скорости дрейфа судна в зависимости от угла кажущегося ветра при скорости ветра 15 м/с. Судно 3.
| <== предыдущая страница | | | следующая страница ==> |
| Методы определения параметров и характеристик эксплуатируемых дорог | | | ОПРЕДЕЛЕНИЕ КРИТЕРИЕВ И СПОСОБЫ ИХ ОЦЕНКИ СУДНА |
Дата добавления: 2014-07-11; просмотров: 1166; Нарушение авторских прав

Мы поможем в написании ваших работ!