Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Принцип действия эхолота и основные устройства, входящие в его состав
Назначение навигационного эхолота — измерение глубины под килем судна. Существует множество разновидностей навигационных эхолотов. Однако принцип действия любого из них основан на измерении времени между посылкой зондирующего и приходом отраженного от дна сигнала.
Зондирующий сигнал — это чаще всего импульс прямоугольной или экспоненциальной формы, “заполненный“ гармоническими колебаниями рабочей частоты.
Длительность импульса  выбирается с учетом ряда факторов, в том числе и противоречивых. Так, с увеличением увеличивается дальность действия эхолота; уменьшение ведет к увеличению разрешающей способности по глубине.
выбирается с учетом ряда факторов, в том числе и противоречивых. Так, с увеличением увеличивается дальность действия эхолота; уменьшение ведет к увеличению разрешающей способности по глубине.
Рабочая частота навигационных эхолотов обычно выбирается в пределах 15 – 100 кГц.
В современных эхолотах с целью повышения эффективности предусматривается возможность изменения ряда параметров излучаемых сигналов: мощности, длительности импульсов и частоты их следования, рабочей частоты.
Рассмотрим принцип действия импульсного эхолота, упрощённая структурная схема которого изображена на рис. 2.3.
В состав представленной структурной схемы входят:
· А1 и А2 соответственно передающая и приемная антенны или вибратор-излучатель и вибратор-приемник;
· ПРД — передающее устройство, в котором осуществляется формирование сигнала посылки;
· ПРМ — приемное устройство;
· УУ — управляющее устройство;
· И — устройство отображения и регистрации информации.
Очевидно, что время между посылкой ультразвукового импульса, излученного антенной А1 и приемом отраженного от дна сигнала антенной А2
t =  ,
,
где r — расстояние от антенны до дна (т. О).
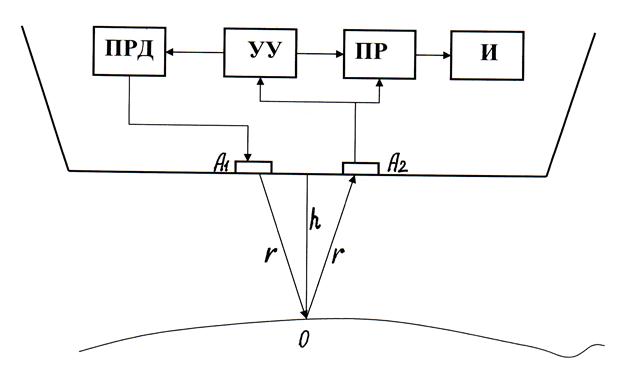
Рис. 2.3
На больших глубинах (практически уже при h > 10 м) можно считать
h  r , тогда из записанного равенства находим
r , тогда из записанного равенства находим
 |
 h =
h =  . (2.18)
. (2.18)
Таким образом, измерив интересующее нас время и зная значение скорости звука в воде, элементарно определяется глубина под килём судна. Как правило в качестве расчётного значения скорости принимают 1500 м/с (напомним, сто скорость звука в воде в среднем может изменятся в пределах 1440 — 1585 м/с).
Как уже отмечалось основная задача ПРД — формирование сигнала посылки. В эхолотах с пьезокерамическими антеннами используют так называемый тональный способ формирования сигнала посылки.
Функциональная схема, изображённая на рис. 2.4 дает представление о данном способе формирования сигнала посылки.
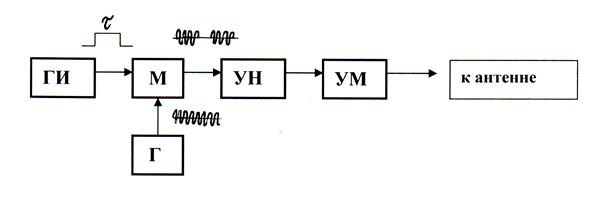
Рис. 2.4
ГИ — генератор импульсов вырабатывает прямоугольные видеоимпульсы определенной длительности и частоты следования; передает их в М — модулятор. Сюда же поступают генерируемые генератором Г гармонические колебания рабочей (несущей) частоты f. Ее выбирают равной собственной частоте антенны. На выходе М получают радиоимпульсы длительностью  несущей частоты f. После соответствующего усиления по напряжению и мощности в УН и УМ, сформированный сигнал передается в передающую антенну.
несущей частоты f. После соответствующего усиления по напряжению и мощности в УН и УМ, сформированный сигнал передается в передающую антенну.
Приемное устройство эхолота выполняет следующие основные функции: его усиление, отделение полезного сигнала от помех, детектирование и приведение к виду удобному для извлечения информации об измеряемой глубине для ее отображения, регистрации и передаче в другие приборы и системы.
Описанную работу эхолота можно проиллюстрировать изображением используемых в навигационном эхолоте сигналов (рис. 2.5).
Период следования зондирующих импульсов Тп определяется в соответствии с диапазоном (шкалой) измеряемых глубин. То же можно сказать и о длительности зондирующих импульсов  .
.
Отраженный от дна эхо-сигнал приходит к приемной антенне с задержкой относительно момента посылки на время  . Эта задержка пропорциональна глубине.
. Эта задержка пропорциональна глубине.
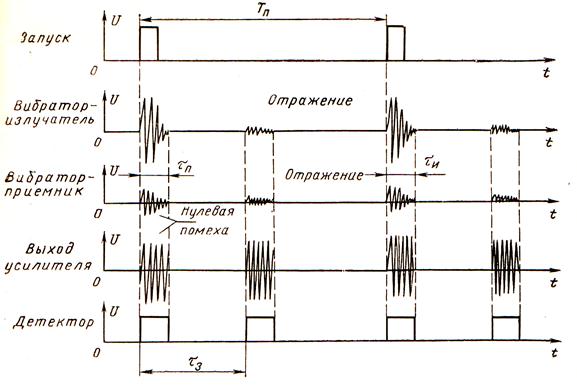
Рис. 2.5
Принятый сигнал имеет малую амплитуду, поэтому его усиливают до уровня ограничения выходными каскадами. Потом сигнал детектируется для получения видеоимпульсов, которые удобнее использовать в отсчетных устройствах.
В качестве устройств отображения и регистрации информации в настоящее время используются:
· аналоговые, цифровые и цифроаналоговые индикаторы;
· устройства для регистрации изменения глубины под килем судна в процессе его плавания — самописцы или в последнее время электронные регистраторы глубины (ЭР) на основе телевизионного монитора;
· устройства для сигнализации о выходе судна на заданную глубину.
Основные погрешности эхолотов возникают по ряду причин;
· из-за отличия действительной скорости распространения звука от общепринятой расчетной 1500 м / с;
· из-за наличия базы, т.е. расстояния между передающей и приемной антеннами (сказывается на малых глубинах);
· из-за наклона дна (незначительна);
· из-за технического и технологического несовершенства прибора (инструментальная погрешность).
| <== предыдущая страница | | | следующая страница ==> |
| Гидроакустические антенны | | | Гидроакустические лаги |
Дата добавления: 2014-08-04; просмотров: 1008; Нарушение авторских прав

Мы поможем в написании ваших работ!