Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Определение сейсмических нагрузок для систем со многими степенями свободы
Подставляя (10-а) в (10) получаем
 (10-б)
(10-б)
или с учетом (9) 
Сопоставляя полученный результат с предпоследней лекцией

Теперь 
Введем коэффициент  :
:  . (11)
. (11)
Установим его физический смысл, просуммировав эти коэффициенты по всем формам:
 .
.
Таким образом,  - нормированный коэффициент формы колебаний – это коэффициент, определяющий вклад смещения к-й массы, происходящий по i-й форме, в суммарное смещение.
- нормированный коэффициент формы колебаний – это коэффициент, определяющий вклад смещения к-й массы, происходящий по i-й форме, в суммарное смещение.
Перепишем (11) в другой форме:  (12)
(12)
Эта формула отличается от формулы линейного осциллятора коэффициентом ηik < 1. Тогда, повторяя все выкладки лекции о линейном осцилляторе, получим формулу СНиП: Сейсмическая нагрузка  приложенная в точке k, соответствующая i-му тону колебаний, определяется формулами
приложенная в точке k, соответствующая i-му тону колебаний, определяется формулами
 , (13)
, (13)
где  коэффициент динамичности, соответствующий i-му тону колебаний.
коэффициент динамичности, соответствующий i-му тону колебаний.
Определение внутренних усилий
Казалось бы, далее все просто, зная  , можно построить эпюры внутренних усилий Ni (M,Q,N) однако максимальные значения сейсмических сил по формулам (13) достигаются в различные моменты времени. Задача эта непростая. В нормах принято среднеквадратичное значение усилий
, можно построить эпюры внутренних усилий Ni (M,Q,N) однако максимальные значения сейсмических сил по формулам (13) достигаются в различные моменты времени. Задача эта непростая. В нормах принято среднеквадратичное значение усилий
 , (14)
, (14)
где n – число учитываемых форм колебаний.
Нормы требуют учета  и только 1 форму, если
и только 1 форму, если  . Для ответственных зданий необходимо учитывать
. Для ответственных зданий необходимо учитывать 
Алгоритм расчета
Представленный алгоритм описывает последовательность расчета по нормам СНиП при ручном расчете, а также при расчете на ЭВМ практически по любой программе.
· Определяются частоты и формы колебаний для выбранных n форм.
· Вычисляются параметры 
· Для каждой i-й частоты определяются сейсмические силы  , приложенные к k-й массе и эти силы считаются как внешние силы для i-го варианта загружения.
, приложенные к k-й массе и эти силы считаются как внешние силы для i-го варианта загружения.
· Производится статический расчет для n вариантов загружений от найденных сил  .
.
· Определяются расчетные усилия  .
.
Результаты расчетов
· Выводятся сейсмические силы и формы колебаний для каждой частоты собственных колебаний.
· Выводятся на экран расчетные усилия M, Q, N по первому варианту загружения, причем, поскольку все расчетные усилия только положительны, не следует ожидать равновесия усилий в узлах.
Расчет на воздействие акселерограмм
Основан на использовании записей ускорений основания (акселерограмм) при землетрясениях, наиболее опасных для рассматриваемых сооружений, а также синтезированных акселерограмм, полученных путем обработки записей сильных землетрясений.
СНиП предусматривает обязательный расчет по нормам для всех зданий и сооружений, но вместе с тем для ответственных и высоких, выше 16 этажей зданий и сооружений, предписывается расчет на воздействие акселерограмм.
1) Первый подход – непосредственное вычисление сейсмических сил.
Теоретически, по формуле (12)  ,
,
Где  Вычисление интеграла Дюамеля можно произвести с помощью различных алгоритмов, простейший из них описан в книге Александрова и др. на стр. 53. Там функция внешнего воздействия представляется в виде кусочно-линейной, на каждом шаге интегрирования определяются перемещения и скорости, которые служат начальными для следующего шага.
Вычисление интеграла Дюамеля можно произвести с помощью различных алгоритмов, простейший из них описан в книге Александрова и др. на стр. 53. Там функция внешнего воздействия представляется в виде кусочно-линейной, на каждом шаге интегрирования определяются перемещения и скорости, которые служат начальными для следующего шага.
2)  Второй подход – численное интегрирование уравнений движения (7-а). Разработано множество методов, среди которых можно назвать методы Ньюмарка, Вилсона, Хаболта и другие. Здесь мы подробно рассмотрим метод Рунге-Кутта, который реализован в программе RADIUS, далее применяемой при решении конкретных задач сейсмического расчета.
Второй подход – численное интегрирование уравнений движения (7-а). Разработано множество методов, среди которых можно назвать методы Ньюмарка, Вилсона, Хаболта и другие. Здесь мы подробно рассмотрим метод Рунге-Кутта, который реализован в программе RADIUS, далее применяемой при решении конкретных задач сейсмического расчета.
Уравнения движения 
представим в виде
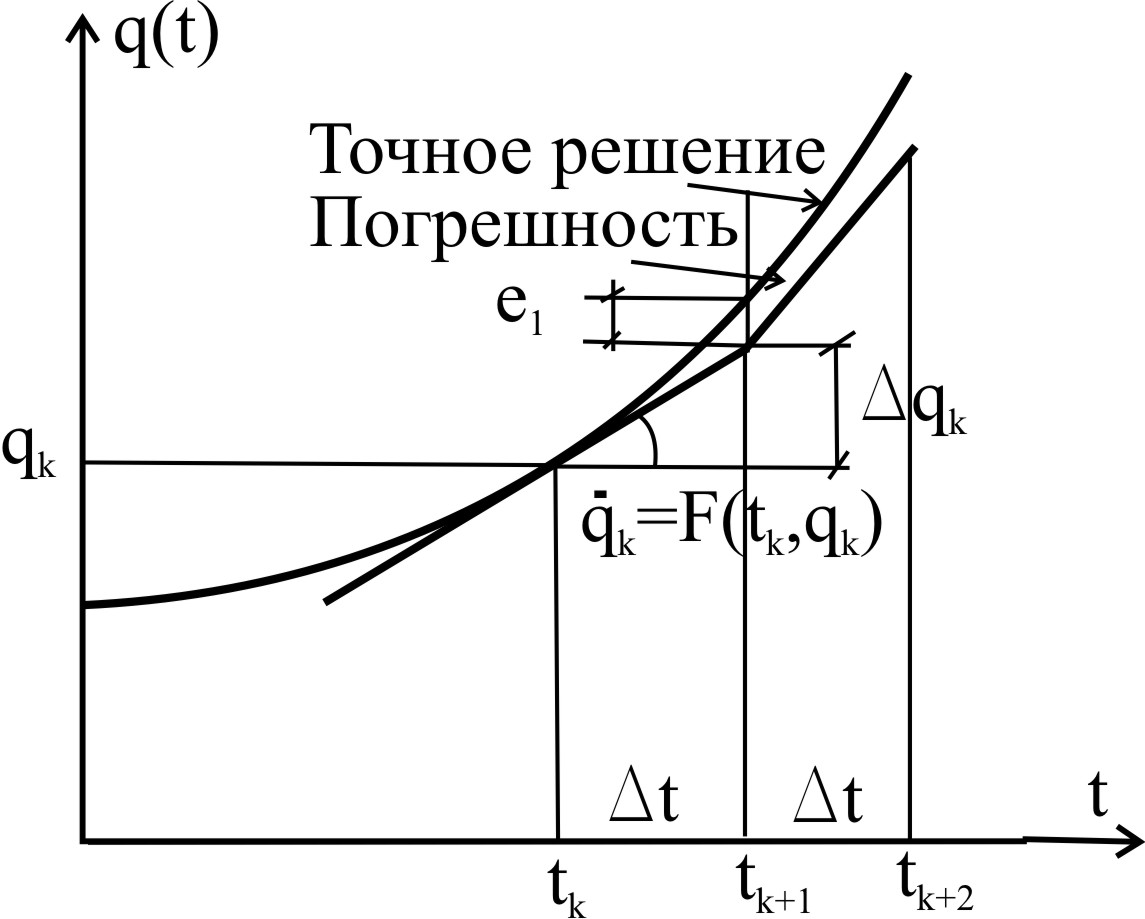
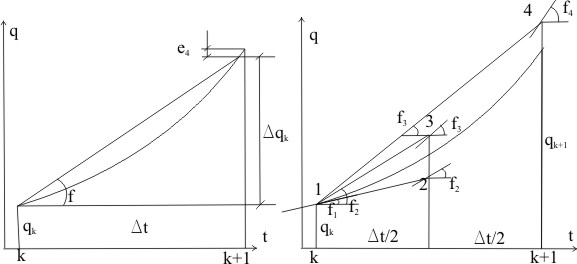
Это система дифференциальных уравнений первого порядка в нормальной форме. Рассмотрим процедуру метода Рунге-Кутта вначале на простейшем случае – уравнении первого порядка  , тогда, в соответствии с рисунком
, тогда, в соответствии с рисунком

 (15)
(15)
Это метод Эйлера, или метод Рунге-Кутта первого порядка, т.к. он соответствует разложению кривой q(t) в ряд Тэйлора по степеням ∆t и удержания первого линейного члена ряда. Погрешность имеет порядок ∆t2 , что записывается как О(∆t2). По формуле (15) находим следующую точку, вычисляя один раз функцию  . Недостаток – с увеличением числа шагов быстро накапливается погрешность e1.
. Недостаток – с увеличением числа шагов быстро накапливается погрешность e1.
Мы в программе используем метод Рунге-Кутта четвертого порядка, в котором переход от tk к tk+1 выполняется по формулам
 (16)
(16)
Где  .
.
При этом требуется четыре раза вычислять функцию F.
Геометрически формула (16) выражает переход от точки k к точке k+1 с помощью секущей, проведенной с крутизной f (тангенс угла наклона), которая получена как среднее из f1 – f4, вычисленных в 4-х точках 1 – 4. Погрешность формул (16) О(∆т5), т.е. значительно меньше, чем у формулы (15).
Если вместо одного уравнения система уравнений первого порядка, то  - векторы.
- векторы.
Таким образом, в каждый момент времени получаем qi(t), а затем по формуле (10-б) вычисляем сейсмическую силу, соответствующую k-й массе при колебаниях по i-й форме.
Существуют и другие методы (так называемые методы линейного ускорения) – методы Ньюмарка, Вилсона и т.д. – см. рекомендованные книги Александрова, Bathe, Wilson.
Итак, подводим итог: дана система уравнений

Где 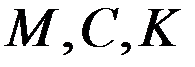 , матрицы масс, демпфирования, жесткости,
, матрицы масс, демпфирования, жесткости,
Z – вектор перемещений. Считаем, что вектор  задан в глобальной системе координат. Тогда осевые компоненты
задан в глобальной системе координат. Тогда осевые компоненты
 (17)
(17)
Здесь i, j , k – орты координатных осей.
С помощью метода модальной суперпозиции получаем разделение уравнений

На каждом шаге по времени для каждой формы колебаний находим сейсмические силы для каждой массы по формуле (10-б), после нахождения  методом Рунге-Кутта.
методом Рунге-Кутта.
Выбор шага по времени
Метод Рунге-Кутта условно устойчивый, т.е. его точность зависит от величины шага по времени. Рекомендуется  , где
, где  - минимальный период учитываемых форм.
- минимальный период учитываемых форм.
Алгоритм решения
· Формируется матрицы  .
.
· Вычисляются частоты и формы свободных колебаний.
· Определяются обобщенные массы Mi и обобщенные нагрузки Qi(t).
· Решаются уравнения (15) и для всех выбранных форм колебаний находятся обобщенные координаты qi для каждого временного шага.
· Для каждого временного шага вычисляется вектор  .
.
· Для каждого временного шага определяются внутренние усилия  , где
, где  - вектор перемещений m-го элемента.
- вектор перемещений m-го элемента.
· На каждом временном шаге определяются нормы динамических перемещений  - сумма модулей компонент перемещений.
- сумма модулей компонент перемещений.
· На момент времени tk, когда  , выводятся результаты расчета - перемещения и усилия.
, выводятся результаты расчета - перемещения и усилия.
· Строится выборка максимальных значений усилий по всем временным шагам для каждого сечения, строятся эпюры усилий. Равновесия в узлах ожидать не следует, т.к. в разных сечениях максимальное усилие появляется в разные моменты времени.
| <== предыдущая страница | | | следующая страница ==> |
| Определение сейсмических нагрузок для систем со многими степенями свободы. Определение сейсмических нагрузок для систем со многими степенями свободы | | | Нормативный расчет трехэтажного здания |
Дата добавления: 2014-08-09; просмотров: 526; Нарушение авторских прав

Мы поможем в написании ваших работ!