Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Асинхронные машины
Асинхронные двигатели - самые распространенные электрические машины. При их работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, то есть с угловой скоростью, отличающейся от угловой скорости магнитного поля. (Доливо - Добровольский -1888г). Широкое распространение объясняется простотой и дешевизной. В основном асинхронная машина состоит из трёх неподвижных катушек, размещенных на общем сердечнике, и помещенной между ними четвертой вращающейся катушки. В машине нет каких-либо легко повреждающихся или быстро изнашиваемых деталей, как у машин постоянного тока- коллекторы.
Асинхронные машины малой мощности часто выполняются однофазными для устройств, питающихся от двухпроводной сети (применяют в бытовой технике).
Общий недостаток машин - сложность и неэкономичность регулирования режима работы.
Устройство трёхфазной асинхронной машины.
Машина состоит из неподвижного статора и вращающегося ротора.
Статор состоит из пластин электротехнической стали, изолированных друг от друга слоем лака (рис.14.1.а). 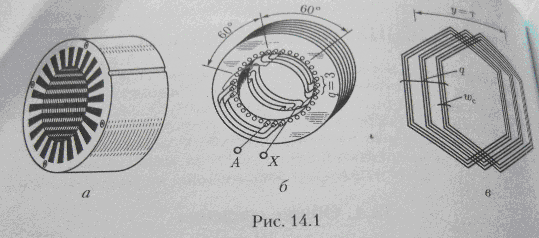
В пазах на внутренней стороне статора размещаются три фазные обмотки. Каждая фазная обмотка содержит одну или несколько катушечных групп, соединенных последовательно или расположенных вдоль окружности статора на равном расстоянии друг от друга. На рис. 14.1.б показана одна из обмоток, состоящей из двух катушечных групп (А-начало, Х-конец фазной обмотки).
Фазные обмотки соединяются между собой звездой или треугольником и подключаются к трёхфазной сети. Токи возбуждают в машине вращающееся магнитное поле статора с числом пар полюсов р, равным числу катушечных групп в одной фазной обмотке. Это достигается взаимным расположением фазных обмоток, при котором их катушечные группы сдвинуты по окружности статора относительно катушечных групп соседней фазной обмотки на угол 1200/р. В частности для обмотки четырехполюсной машины (р=2) этот угол равен 600 (Рис. 14.1б).
Для укладки многовитковой катушечной группы в пазах статора её разделяют на q последовательно соединенных секций по ωc витков в каждой секции.
Возможны секции с одинаковым или неодинаковым шагом намотки у. В первом случае стороны каждой секции сдвинуты по окружности статора на угол 1800/p, что соответствует одному полюсному делению у=τ, то есть длине окружности статора, приходящейся на один полюс (рис.14.1. в). Во втором случае секции катушечной группы вложены друг в друга (рис.14.1.б).
Распределение фазных обмоток по нескольким пазам улучшает распределение магнитного поля в воздушном зазоре между ротором.
Конструкция ротора.
Ротор - цилиндрический сердечник (рис. 14.3.а), собранный из пластин электротехнической стали, изолированных друг от друга лаком. Сердечник ротора насажен на вал, закрепленный в подшипниках.
В пазах ротора располагаются витки обмотки ротора. В большинстве двигателей применяется короткозамкнутый ротор. Он дешевле и его обслуживание проще. Обмотка ротора - цилиндрическая клетка (рис.14.3.б) из медных или алюминиевых стержней, которые без изоляции вставляются в пазы сердечника ротора. Торцы стержней замыкаются кольцами.
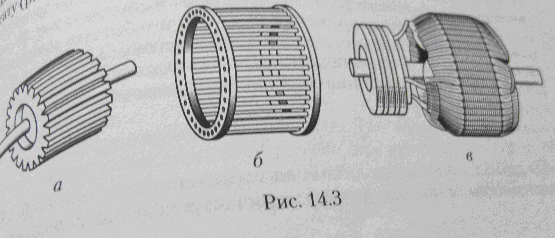
Обмотка фазного ротора (рис.14.3.в) выполняется изолированным проводом. Чаще она трехфазная, с тем же числом катушек, что и в обмотке статора. Три фазные обмотки ротора соединяются на роторе звездой, а свободные их концы соединяются с тремя контактными кольцами, укрепленными на валу машины, но изолированные от вала.
На кольца наложены щетки, укрепленные на неподвижных щеткодержателях статора. Через щетки обмотка ротора присоединена к трёхфазному реостату (рис. 14.4). Включение реостата в цепь ротора даёт возможность существенно улучшить условия пуска двигателя – уменьшить пусковой ток и увеличить начальный вращающий момент. Можно еще и регулировать скорость вращения двигателя.
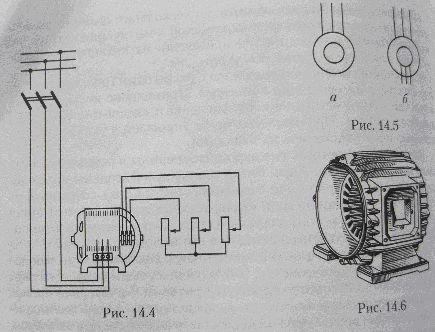
На рис. 14.5 показаны условные обозначения асинхронных машин с короткозамкнутым (а) и фазным (б) роторами. Рис.14.6 –общий вид двигателя.
Режимы работы трёхфазной асинхронной машины.
Режим работы зависит от электромагнитного взаимодействия токов обмотки статора и ротора. Вращающееся магнитное поле статора вынуждает вращаться и ротор в том же направлении, что и вращение магнитного поля. Но чем быстрее вращается ротор, тем меньше в нём индуцированная в его обмотке ЭДС, а следовательно, и токи.
Скольжение S=(n1-n)/n1-(n1-частота вращения магнитного поля)
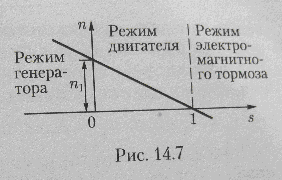 На рис. 14.7 построена линейная характеристика n(s).
На рис. 14.7 построена линейная характеристика n(s).
В зависимости от величины s асинхронная машина может работать в режимах двигателя
(0<s<1), генератора (s<0) и электромагнитного тормоза (s>1).
В режиме двигателя трёхфазная асинхронная машина преобразует электрическую энергию в механическую. Ротор должен вращаться медленнее магнитного поля с такой частотой, чтобы возникающий вращающий момент уравновесил тормозной момент от нагрузки.
В режиме генератора машина преобразует механическую энергию в электрическую. Ротор генератора вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой большей, чем частота вращения поля.
В режиме электромагнитного тормоза ротор трёхфазной машины вращается в направлении, противоположном направлению вращения магнитного поля, создаваемого токами в обмотках статора. При этом в машине рассеивается значительная энергия в магнитном поле из-за гистерезиса и вихревых токов в обмотках.
Вращающееся магнитное поле статора асинхронного двигателя
Токи обмоток статора, подключённые к трёхфазной сети, возбуждают в машине вращающееся магнитное поле статора, которое индуцирует ЭДС в замкнутой накоротко обмотке ротора. Токи ротора, возникающие под действием этой ЭДС, возбуждают вращающееся магнитное поле ротора. Частота и направление вращения этих полей одинаковы, что обуславливает результирующее вращающееся магнитное поле, называемое рабочим полем машины.
Рассмотрим характеристики вращающегося магнитного поля статора, полагая, что цепь ротора разомкнута. Характеристики этого поля зависят от геометрического расположения фазных обмоток на статоре.
Двухполюсное вращающееся поле.
Для его получения нужно одинаковые фазные обмотки расположить на статоре под углом 1200. На рис. 14.8.а каждая фазная обмотка условно показана как одновитковая (А.Б.С -начало обмоток, Х,У,Z-концы)
При соединении обмоток звездой (рис.14.8.б) и подключении к трёхфазной сети питания токи в обмотках будут равны (рис.14.8.в):
IA=IM sinωt, IB=IM sin(ωt-1200 ), IC=IM sin(ωt-2400).
Токи создают магнитные поля индуктивностью:
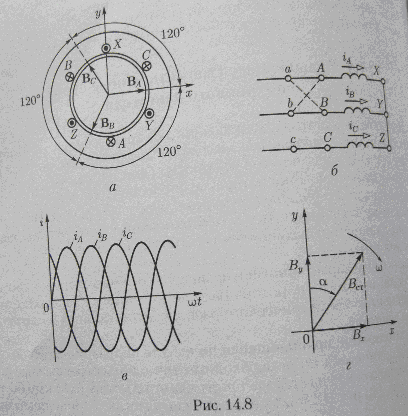 BA=BM sinωt,
BA=BM sinωt,
BB=BM sin(ωt-1200),
BC=BM sin(ωt-2400).
Сумма векторов этих магнитных индукций образует магнитное поле статора.
Опишем поле статора в декартовых координатах, где ОХ–направление оси катушки А.
Тогда результирующая индуктивность вдоль оси ОХ равна:
ВХ=ВА cos0+BB cos(-120)+BC cos(-240)=1.5 BM sinωt.
Результирующая индуктивность вдоль оси ОУ:
ВУ=ВА sin(0)+BB sin(-120)+BC sin(-240)=1.5 BM cosωt.
В итоге магнитная индукция поля статора равна:
ВСТ=√(ВХ2+ВУ2)=1.5 ВМ, то есть её значение постоянно.
tgα=BX/BY=tgωt, то есть α=ωt.
Значит, магнитное поле статора вращается в плоскости осей катушек по направлению движения часовой стрелки с угловой скоростью ω.
Вектор индукции магнитного поля последовательно совпадает с осью той фазы обмоток, ток в которой достигает максимального значения.
Чтобы изменить направление вращения магнитного поля статора достаточно изменить порядок подключения двух любых фаз (рис.14.8.б).
На рис.14.9.а приведено распределение магнитных линий вращающегося магнитного поля двухполюсной асинхронной машины для момента времени т1. На рис.14.9б показано распределение индукции В в зазоре между ротором и статором в зависимость от расстояний z вдоль окружности статора для моментов времени т1=0 и т2>т1.
Линейная скорость перемещения магнитного поля вдоль зазора равна
| t2>t1 |
| B |
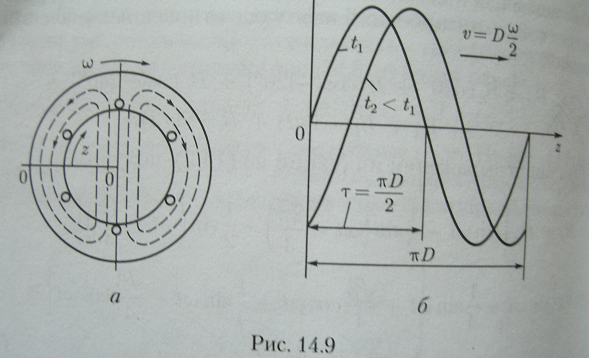
V=D ω/2. При f=50Гц частота перемещения магнитного поля статора n1=50 60=3000 об/мин.
Многополюсное вращающееся поле.
| Z |
На рис. 14.10 дана упрощенная схема обмотки статора шестиполюсной машины (р=3).
| Y A Z |
| Y A Z |
| A |
| A |
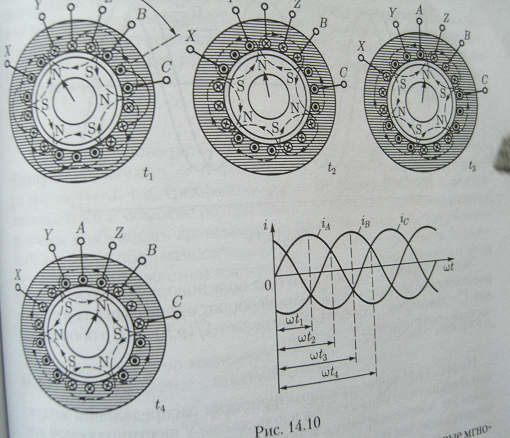
В данном случае все фазные обмотки разделены на 3р=9 частей, т.е. каждая фазная обмотка - на три части. Каждая катушечная группа фазной обмотки изображена в виде одновитковой секции, причём соединения даны только для фазы А и на тыльной торцевой стороне статора показаны штриховой линией. Стороны такой катушечной группы сдвинуты по окружности статора на угол 180/р, что соответствует одному полюсному делению τ. В частности для шестиполюсной машины этот угол 180/3=600. На рис.14.10 изображены также кривые мгновенных значений токов IA,IB,IC статора для четырех моментов времени т1 - т4.
На крайнем левом рисунке показано направление токов в проводах в момент времени т1, когда ток фазы А имеет амплитудное значение. В соответствии с направлениями токов магнитные линии поля статора в трёх местах входят в ротор и в трёх местах выходят из него, образуя три пары полюсов (р=3).
В момент времени т2 направления токов, а вместе с ними и распределение магнитного поля статора изменяются. Магнитное поле статора за время одного периода переменного тока поворачивается на одну треть окружности, т.е. на расстояние, соответствующее дуге, занимаемой тремя участками фазных обмоток на статоре. Эта часть окружности статора соответствует двум полюсам (2р) вращающегося магнитного поля статора и называется двойным полюсным делением.
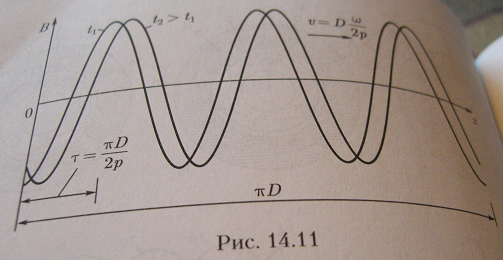
За один период Т переменного тока поле поворачивается на двойное полюсное деление. А полный оборот происходит за р периодов. Следовательно, в секунду поле делает f/p оборотов, а частота вращения составит n1=f 60/p<n двухполюсной машины. У 4-полюсных машин n1=1500 об/мин, у 6-полюсных n1=1000 об/мин, что позволяет применять безредукторные системы. На рис. 14.11 приведена характеристика распределения индукции В магнитного поля статора вдоль зазора у шестиполюсной машины для моментов времени т1 и т2, если отсчёт расстояния z вдоль зазора аналогичен показанному на рис. 14.9 а.
| Z |
Вращающееся магнитное поле ротора и рабочее вращающееся магнитное поле асинхронного двигателя.
Обмотка ротора состоит из N стержней. Между ЭДС, индуцированными вращающимся магнитным полем статора в двух соседних стержнях, сдвиг фаз равен 360 р/N. Можно считать, что число фаз короткозамкнутого ротора равно числу стержней N.
При разомкнутой цепи ротора ток в ней отсутствует. На ротор не действуют электромагнитные силы и он неподвижен. Магнитное поле машины является магнитным полем статора. Частота индуцированной в ней ЭДС равна частоте токов статора f. Если такой ротор вращать с частотой n, то частота индуцированных в его обмотке ЭДС уменьшается
f2=р (n1-n)/60=f1•s.
Если цепь ротора замкнуть, то токи в ней образуют многофазную систему с м2=N фазами. Следовательно, токи в обмотке ротора аналогично токам в обмотке статора должны возбуждать вращающееся магнитное поле. Частоту вращения nОТН этого поля относительно ротора можно определить из выражения:
nОТН=f2 60/p
Так как сам ротор вращается в том же направлении с частотой n, то его поле вращается в пространстве с частотой:
nОТН+n=(n1-n)+n=n1,
то есть поле ротора вращается синхронно с полем статора.
Значит, вращающиеся поля статора и ротора по отношению друг к другу остаются неподвижными, что является условием полной передачи энергии от статора к ротору.
Складываясь, вращающиеся магнитные поля статора и ротора образуют рабочее вращающееся поле в асинхронном двигателе. Рабочее вращающееся поле в асинхронном двигателе служит таким же связующим звеном между обмотками статора и ротора, как и переменное магнитное поле в магнитопроводе трансформатора, передающее энергию от первичной ко вторичной обмотке.
Различают несколько режимов работы асинхронного двигателя:
-номинальный режим при U1=U1НОМ, I1=I1НОМ рабочей сети,
-рабочий режим, при котором напряжение U1≈UНОМ, а нагрузка двигателя определяется тормозным моментом на валу при скольжении s<sНОМ и токе I1=I1НОМ,
-режим пуска двигателя в ход, возникающий при подключении напряжения питающей сети и неподвижном роторе s=1.
Механическая характеристика асинхронного двигателя.
Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозного моментов; с увеличением нагрузки на валу должен возрастать и вращающий момент.
Это происходит следующим образом. При увеличении нагрузки на валу тормозной момент оказывается больше вращающего момента, вследствие чего частота вращения ротора уменьшается- возрастает скольжение. Но повышение скольжения вызывает увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении. С возрастанием скольжения растет ток ротора и вращающий момент:
MBP=3∙p∙RВ2∙U12 /(ω∙s∙(RВ1+R В2/s)2+(Xpac1+Xpac2)2 )= Const ФВ I2 cosφ2,
где ФВ- постоянное значение магнитного потока вращающегося поля. Коэффициент мощности цепи ротора равен
cosφ2=RB2/√(R2 B2+(s ω LРАС2)2 ),
здесь s ω LРАС2 –индуктивное сопротивление рассеяния обмотки ротора, пропорциональное скольжению. С увеличением скольжения ток I2 увеличивается, а ФВ и cosφ2 уменьшаются. Значит, существует такое (критическое) значение скольжения sKP, при котором вращающий момент достигает максимума.
Если приравнять нулю производную dMBP/ds=0, то можно определить sKP=RB2/(Xpac1+Xpac2) где ХРАС- индуктивное сопротивление рассеяния обмоток. 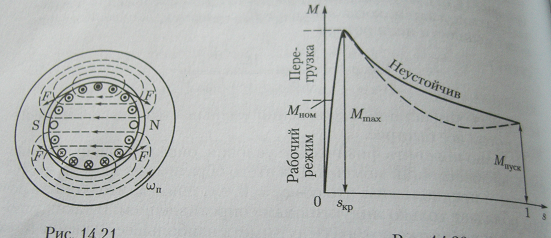 Максимальный момент двигателей большой мощности достигается при sKP=0.04, у двигателей малой мощности sKP=0.14.
Максимальный момент двигателей большой мощности достигается при sKP=0.04, у двигателей малой мощности sKP=0.14.
Характерная зависимость вращающего момента от скольжения показана на предыдущем рисунке. Максимум вращающего момента делит кривую на устойчивую (0< s< sKP) и неустойчивую (sKP<s<1) часть.
У работающего двигателя динамическое равновесие моментов автоматически восстанавливается при увеличении скольжения, пока тормозной момент на валу меньше максимального вращающего момента двигателя. В области s>sKP, когда с увеличением скольжения вращающий момент начинает уменьшаться, двигатель останавливается.
Максимальный момент двигателя может быть записан


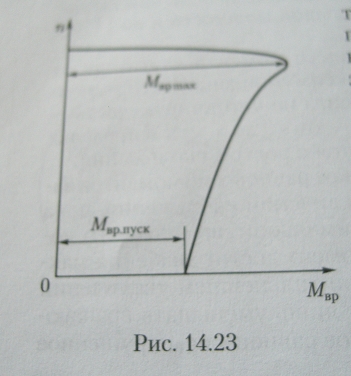
Где ХРАС- индуктивное сопротивление рассеяния на обмоток 1 и 2. Зависимость момента от квадрата напряжения делает асинхронный двигатель очень чувствительным к напряжению питающей сети. При значительном уменьшении напряжения запуск двигателя может не состояться. У типовых двигателей М  МАХ=(2…3) МНОМ. На рис 14.23 видно, что частота вращения асинхронного двигателя незначительно снижается при увеличении вращающего момента в пределах от нуля и до максимального значения, т.е. механическая характеристика двигателя в этом случае жесткая.
МАХ=(2…3) МНОМ. На рис 14.23 видно, что частота вращения асинхронного двигателя незначительно снижается при увеличении вращающего момента в пределах от нуля и до максимального значения, т.е. механическая характеристика двигателя в этом случае жесткая.
Рабочие характеристики асинхронного двигателя.
Рабочими характеристиками принято называть зависимость коэффициента мощности cosφ1, n, MBP и КПД от мощности на валу Р2 (см. рис.14.24).
cosφ1  =P1/√(P12+Q12), где Q1-реактивная мощность, характеризующая обмен энергией между магнитным полем двигателя и источником энергии. Р1-активная мощность двигателя. С увеличением мощности на валу Р2 реактивная составляющая Q1 немного относительно уменьшается, а активная составляющая- растёт. На холостом ходу коэффициент мощности 0.2, при номинальной нагрузке равен 0.8…-.95. Главная причина низкого коэффициента мощности предприятий - малая загруженность асинхронных двигателей. КПД:
=P1/√(P12+Q12), где Q1-реактивная мощность, характеризующая обмен энергией между магнитным полем двигателя и источником энергии. Р1-активная мощность двигателя. С увеличением мощности на валу Р2 реактивная составляющая Q1 немного относительно уменьшается, а активная составляющая- растёт. На холостом ходу коэффициент мощности 0.2, при номинальной нагрузке равен 0.8…-.95. Главная причина низкого коэффициента мощности предприятий - малая загруженность асинхронных двигателей. КПД:
η=Р2/P1,
где Р1=Р2+РПОТ., РПОТ- мощность потерь в сердечнике статора на гистерезис и вихревые токи, механические потери, потери на нагрев обмоток статора и ротора. ηмах=0.65…0.95 (при нагрузке 0.75 от номинальной).
Пуск двигателя в ход.
При оценке асинхронного двигателя важное значение имеют его пусковые характеристики: I, M ВР.ПУСК, плавность и экономичность запуска, длительность пуска.
| S |
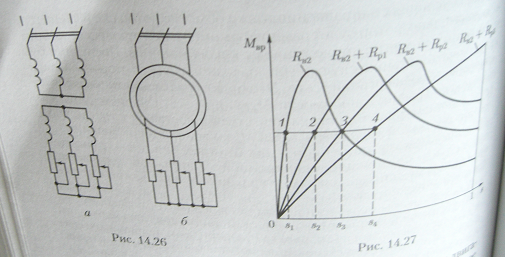
Пуск двигателя с фазным ротором (см. рис.14.26)..
Ротор имеет в своём составе пусковые реостаты на каждой фазе. При увеличении сопротивления пусковых реостатов в цепи ротора снижается пусковой ток, увеличивается пусковой момент и изменяется скольжение ротора s. При s=sKP=RB2/(Xpac1+Xpac2) достигается максимум момента вращения. Во время пуска если задать в цепи ротора RB2= Xpac1+Xpac2(см. Мвр стр.95) , то создаются условия достижения максимума пускового момента. Затем, после раскрутки ротора сопротивление пусковых реостатов следует уменьшить, чтобы при меньших скольжения S<1 сохранить большое значение момента вращения (см. рис.14.27). По достижении номинального момента вращения пусковые реостаты следует закоротить.
Пуск асинхронного двигателя с короткозамкнутым ротором.
Обычно применяют прямой пуск. Необходим лишь рубильник, а для двигателя высокого напряжения - масляный выключатель. Кратность
пускового тока 5.5…7 (при мощности двигателя 0.6…100 кВт). Такой кратковременный пусковой ток относительно безопасен для двигателя, вызывает изменение напряжения в сети, что может неблагоприятно сказаться на других потребителях сети. В мощных сетях промышленных предприятий возможен прямой пуск двигателей мощностью до 1000 кВт.
Для двигателей с короткозамкнутой обмоткой кратность пускового момента 1..2. Таким образом, при большом токе двигатель развивает небольшой вращающий момент.
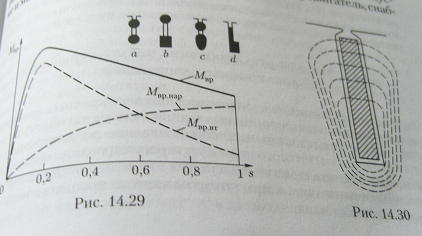
Пусковой момент может быть существенно увеличен, если обмотка ротора имеет двойную беличью клетку. Клетки расположены одна под другой в более глубоких пазах ротора. Стержни наружной клетки изготавливают из марганцовистой латуни, с повышенным удельным сопротивлением по сравнению с медью, а стержни внутренней клетки – из меди. В итоге активное сопротивление внешней клетки в 4-5 раз больше внутренней. Индуктивное рассеяние клеток также различается.
Индуктивное сопротивление внешней клетки меньше, чем у внутренней (рис. 14.29.а, в), так как значительная часть пути линий поля проходит в воздушном зазоре между ротором и статором (см. рис. 14.29 с, д).
В первый момент пуска (s=1) частота токов в обмотках ротора равна частоте сети. В этих условиях полное сопротивление внутренней клетки обусловлено в основном большим индуктивным сопротивлением. В итоге ток в роторе вытесняется из внутренней беличьей клетки, что приводит к увеличению пускового момента, как это имеет место у двигателя с фазным ротором при включении пускового реостата. По мере разбега ротора частота токов в нём уменьшается, уменьшается и индуктивное сопротивление рассеяния. Поэтому ток в наружной клетке уменьшается, а во внутренней клетке возрастает.
Можно рассматривать зависимость М ВР(s) как сумму характеристик двигателя с относительно большим активным сопротивлением обмотки ротора (на рис. 14.29 МВР.НАР) и двигателя с относительно малым активным сопротивлением обмотки МВР.ВТ.
Упрощенный вариант двигателя с двойной беличьей клеткой это прямоугольные стержни малой ширины и большой высоты (см. рис. 14.30). При пуске из-за повышенного индуктивного сопротивления внутренней части стержня ток вытесняется наружу, а при номинальном режиме - ток равномерно занимает всё поперечное сечение стержня.
| МВР |
| <== предыдущая страница | | | следующая страница ==> |
| Машины постоянного тока | | | Синхронные машины |
Дата добавления: 2014-08-09; просмотров: 976; Нарушение авторских прав

Мы поможем в написании ваших работ!