Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Структурная организация измерительных приборов и систем
Под измерительным прибором понимают средство измерения, предназначенное для выработки сигнала измерительной информации, в форме, доступной для восприятия наблюдателем.
Сейчас используются цифровые измерительные преобразователи (ЦИП), которые имеют ряд преимуществ перед аналоговыми. В отличие от аналоговых в ЦИП выполняются следующие операции:
1) квантование измеряемой величины по уровню;
2) дискретизация во времени;
3) координирование информации.
ЦИП – измерительные преобразователи, автоматические вырабатывающие дискретные сигналы в измерительной информации и представляющие показания в цифровой форме. Значения выходной величины отображаются на цифровом отчетном устройстве (ЦОУ) и соответствуют коду, полученному ЦИП. Представление информации в виде кода обеспечивает возможность ее регистрации и обработки, хранения в запоминающем устройстве (ЗУ) без потерь, передачи без искажения практически по любым каналам связи.
В ЦП используется двоичная система исчисления.
 Структурную схема ЦИП:
Структурную схема ЦИП:
УУ – устройство управления
УУП – устройство управления приборами
УИ – устройство индикации
Пр – преобразователь
АЦП – аналого-цифровой преобразователь
АЦП - для преобразования результата измерения в код. Во входном преобразователе Пр1 входная величина преобразуется из одного вида в другой. Самопреобразование ''аналог-код'' осуществляется в Пр2. Если код неудобен для преобразования применяется Пр3. УИ используется для индикации. Согласованную работу АЦП осуществляют УУП.
ЦИП подразделяются на группы по точности, быстродействию, циклические и следящие.
ИС предназначены для получения и выдачи измер-ной инф-ции о состоянии объекта, который представляется ФВ (масса, давление, сила). ФВ можно описывать непрерывной ф-цией x(t), изменяющейся во времени
Результат измерения объединяется в виде информационного блока, содержащего код состояния объекта в момент времени, при котором происходит измерение. Состояние объекта представляется в виде кодов.

Для реализации процедур получения и выдачи измерительной информации ИС содержит измерительные каналы (ИК), устройство обработки информации (УОИ), устройство вывода информации (УВИ).
ИК - аналогово-цифровая часть системы в виде датчиков АП, АЦП.
 Структурная схема ИК с параллельным способом восприятия информации:
Структурная схема ИК с параллельным способом восприятия информации:
Д - датчик;
Су - сравнивающее устр-во;
АП - аналоговый преобразователь;
М - мера;
х1,….хn – входные вел-ны;
р1,….рn – рез-ты преобразований.
10. Классификация приборов и систем. Структурная схема системы автоматического контроля (САК).
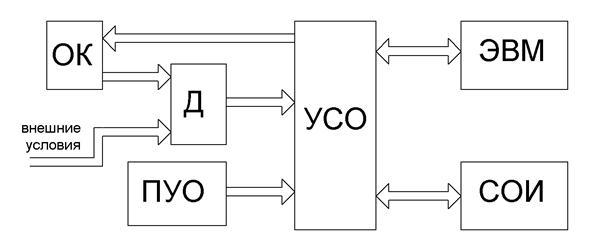
ОК – объект контроля, Д – датчики, УСО – устройство сопряжения с объектами, СОИ – система отображения информации, ПУО – пульт управления оператора.
При контроле устанав степень соответствия м/у сост-ем объекта контроля и заданной нормой. Контроль, при кот-м описание норм задано в количественном виде с помощью аналоговых и цифровых установок и применяются для оценки состояния процесса пр-ва, называют технич. контролем. САК обеспеченная контролем большого числа величин и обработкой инф-ии, широко используется в АСУ ТП (АСУ технолог-ми проц-ми ).
Для получения результатов контроля инф-ии о соотношении текущего сост объекта и установ-ым нормальным, САК должна вып-ть след-ие фун-ии:
1. Восприятие входных величин и преобр-е соотв-их сигналов;
2. Формир и реали-я норм в аналоговых и цифровых видах, сравнение вых. велечин с описанием норм.
3. Формир-е и выдача колич-ых суждений о сост. объекта контроля;
4. Автом-ое упр-е работы системы;
5. Аналогово-цифровые преобразования;
6. Выдача анал-ой и цифр-ой инф-ии;
7. Обработка инф-ии;
8. Формирование актив-х возд-ий необх-х для получения котр-ой инф-ии;
9. Самоконтроль системы;
Нормы и контрольно-измерит. инф-я в САК м.б. описаны по абсолют знач-ям, либо по отклонению от номинальных значений.
САК: специализированные и универсальные.
Специализированные САК предназначенны для узконаправленных операций контроля.Универсальные САК выполняют в виде совокупности средств вычислительной и измерительной техники.
Классификация электроизмерительных приборов.
По конструкции – аналоговые и цифровые. 2,По роду измеряемой величины – амперметры, вольтметры, омметры, ваттметры.
По роду тока – на переменном токе, на постоянном токе или на обоих.
По принципу работы измерительного механизма – магнитоэлектрические, электромагнитные, электростатические, электродинамические, ферродинамические.
По способу предъявления информации – показывающие, регистрирующие, интегрирующие. Последняя классификация получила название системы электроизмерительных приборов.
Принцип работы электроизмерительных приборов магнитоэлектрической системы заключается во взаимодействии магнитного поля легкой подвижной катушки, по которой протекает измеряемый ток, с магнитным полем неподвижного постоянного магнита. Подвижная катушка механически соединена со стрелкой прибора.
Достоинством приборов этой системы являются:
Высокая чувствительность и точность измерения Равномерная шкала
Малое потребление мощности.
Существенным недостатком можно считать невозможность работы в цепях переменного тока (без использования выпрямителей).
Принцип работы электроизмерительных приборов электромагнитной системы заключается во взаимодействии ферромагнитного сердечника, соединенного со стрелкой, с магнитным полем неподвижной катушки, по которой протекает измеряемый ток.
Достоинства: Простота и надежность конструкции. Возможность использования в цепях постоянного и переменного тока. Низкая чувствительность ко внешним магнитным полям.
Недостатки: Малая чувствительность. Неравномерная шкала.
10. Датчики физических величин. Структурная схема тензорезисторного датчика усилия.
Датчик (Д) – часть измер-ой сис-мы, имеющую самостоятельное конструктивное оформление, но вместе с тем обеспечив-ую достижение полезного эф-та при наличии всех других средств, входящих в систему.
Д осущ-ет преобразование вида энергии сигнала, идущего от объекта, в другой удобный для передачи инф-ии в пространстве и хранения в течении длительного времени.
ТД предназначены для измер-ий усилий, деформ-й, моментов. Представляя ТД в виде послед-ой цепи измер-х преобр-ей можно заметить, что некоторые из этих преобразователей яв-ся общими для всех датчиков. Каждый ТД включает в себя: тензорезистор и измерит-ю цепь независимо от того яв-ся ли он датчиком усилия или перемещения. Многие ТД включают в себя упругие элементы преобр-е усилия или давления в деформацию.
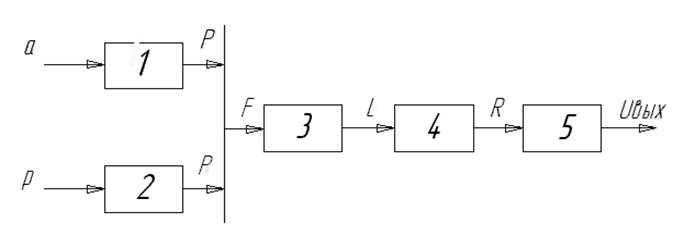
1-инерц груз
2-мембрана
3-упругий элемент
4-тензорезистор
5-измер-я цепь
На рис. изображены струк-ая схема ТД усилия. Измеряемое усилие Р с помощью упругого элемента преобразуется в деформацию ∆l , деформация измеряется в виде изменения сопротивления тензорезистора ∆R, которое в измер-й цепи
 - сопротивление тензорезистора
- сопротивление тензорезистора
Индуктивный преобразователь
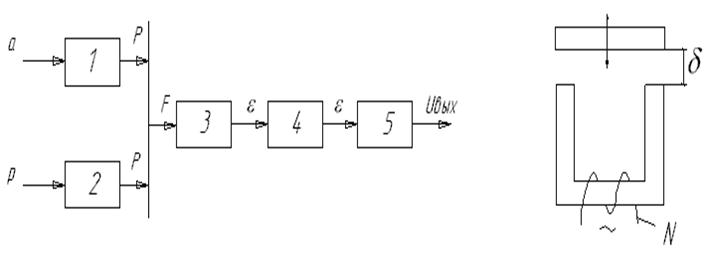
1-инерц. груз
2-мембрана
3-упругий элемент
4-индукционный преобр-ль
5-измерительная цепь
 , где R1, R2 – сопр. ст. и возд.
, где R1, R2 – сопр. ст. и возд.
 , где S – эффект-ая площ-дь мембраны, характер-ий мембрану как измер-ый преобр-ль. Р – входная величина (давление). F – сила (вых-я величина).
, где S – эффект-ая площ-дь мембраны, характер-ий мембрану как измер-ый преобр-ль. Р – входная величина (давление). F – сила (вых-я величина).
Входная величина стержневого упругого элемента:
 , ε – относ. деформ-я (вых. величина упр-го элемента), S – пл-дь попер-го сечения упр-го элемнта, Е – модуль Юнга, F – сила (вход. величина)
, ε – относ. деформ-я (вых. величина упр-го элемента), S – пл-дь попер-го сечения упр-го элемнта, Е – модуль Юнга, F – сила (вход. величина)
14. Структурная схема датчика прямого преобразования.
В физических процессах, можно в каждом случае установить зависимость между входной и выходной величинами.
Y = f(x) – функция преобразования.
Эта зависимость может быть представлена математически или в виде таблицы.
Структурная схема датчика прямого преобразования:

S = S1×S2×…×Sn-1×Sn
15. Структурная схема датчика с обратным преобразователем.
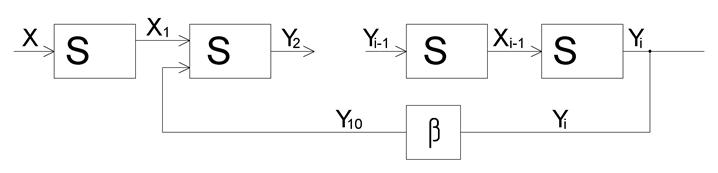
Цепь обратного преобразования включает в себя обратный преобразователь и может состоять из нескольких измерительных преобразователей и может охватывать сколько угодно YK.
Функция преобразования участка цепи с ОС:
 , где
, где  - чувствительность цепи обратного преобразования.
- чувствительность цепи обратного преобразования.
 - чувствительность цепи прямого преобразования
- чувствительность цепи прямого преобразования
 - чувствительность прямого преобразования не охваченного ОС.
- чувствительность прямого преобразования не охваченного ОС.
Введения цепи обратного преобразователя в структурную схему датчика изменяет его функцию преобразования и выходные характеристики.
| <== предыдущая страница | | | следующая страница ==> |
| Математические модели и их классификация | | | Функции преобразования электронных измерительных цепей датчиков |
Дата добавления: 2014-09-10; просмотров: 585; Нарушение авторских прав

Мы поможем в написании ваших работ!